
探究史密斯模糊控制的汽车制动系统
2020-04-07 03:37孙振杰李彩风
科技资讯 2020年2期
孙振杰 李彩风
摘 要:一直以来,汽车在制动控制过程中经常会出现纯滞后问题,为了解决该问题,该文以史密斯预估控制理论为指导,对汽车制动系统进行了反馈控制,以此对闭环传递特征方程内所存在的时滞因子进行消除,以此提高汽车的制动速度和制动效果。在史密斯模糊控制中,以系统动态响应评估结果为依据,以此实现对补偿环节的科学设计,使其能够对被控量进行超前预估,以此消除制动系统时滞,利用模糊PID控制理论来对汽车模型进行构建,这样可降低系统模型精确性给史密斯模糊控制造成的不利影响。通过实验证明,在汽车制动系统中应用史密斯模糊控制来达到自整定PID控制目的,可大大提高制动系统的响应速度,并减少超调量与振荡幅度,从而缩短了汽车的制动时间。
关键词:史密斯 模糊控制 汽车制动系统
中图分类号:U463.52 文献标识码:A 文章编号:1672-3791(2020)01(b)-0067-02
1 汽车模型及其制动系统模型
1.1 汽车模型
通过对汽车在运动过程中所具有的动力学原理进行分析,并以此构建七自由度的汽车力学模型,并对其制动系统中的ASR/ABR动力学关系式进行提取,便可对汽车的动力学模型、制动系统模型以及轮胎模型进行构建,从而使这些模型中各个参数的关系得到正确表述。对于汽车制动来说,其制动过程可以看作是一种非线性过程,在模糊PID控制中,对制动控制的灵敏性、可靠性和智能性进行了一体化集合,以此确保汽车制动系统能够在各种复杂路况下保持其制动稳定,由此便可确立汽车模型中的PID控制模型。
1.2 制动系统模型
在汽车制动系统中,其主要包括两个组成部分:一部分为液压传动系统,另一部分则为制动器,对于液压传动系统的数学模型来说,其构建过程是非常复杂的,这需要应用到流体力学知识,同时,由于系统的数学模型属于高阶系统,因此无法进行控制系统仿真计算。考虑到制动系统中包含有液压系统,并且控制系统内因含有纯滞后环节,而该环节的系统模型属于二阶系统,因此为了使计算与仿真变得更加方便,需要结合经验公式,并以实验数据为基准来对拟合系统参数进行逼近。
2 史密斯模糊控制的汽车制动系统研究
在汽车制动中,考虑到制动系统内包括液压传动系统,而且制动系统在制动过程中会出现纯时滞问题,当输入信号被制动系统接收后,系统往往需要一个响应时间,而从其到接收至响应的这段时间,便是其滞后时间。正是因纯滞后问题的出现,造成制动系统在制动控制过程中的稳定性降低。在20世纪中期,为了使系统滞后问题得到有效解决,史密斯在当时正式提出了预估控制理论,该控制理论在当时引起了很大的社会反响,该理论是通过设置反馈环节来对闭环传递函数内所包含的时滞因子进行消除,使控制器输入端在受到被控量补偿时能够得到超前反馈,进而缩短了控制系统对信号的响应时间。
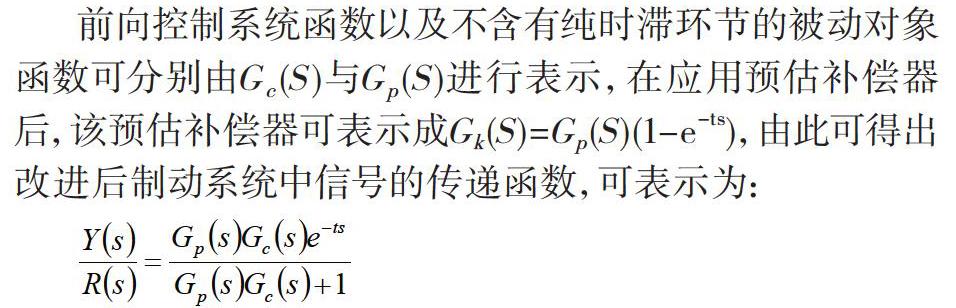
前向控制系统函数以及不含有纯时滞环节的被动对象函数可分别由Gc(S)与Gp(S)进行表示,在应用预估补偿器后,该预估补偿器可表示成Gk(S)=Gp(S)(1-e-ts),由此可得出改进后制动系统中信号的传递函数,可表示为:
相比于以往的制动系统,通过预估补偿器的应用,其系统特征方程在去除时滞因子t后,其方程式可表示为D(S)=GP(S)Gc(S),正是因为其将时滞因子进行了去除,使制动系统在控制过程中的超调量得到了间接减小,同时也缩短了制动时间,使制动系统具有更强的制动稳定性与制动精度。
在应用常规PID模糊控制器时,因参数无法进行准确测量,因此需要应用到模糊控制器,并通过模糊控制器来实现对制动系统的自整定PID控制,通过该控制理论来对制动系统模型进行计算。在模糊控制器中,系统输入项为系统误差与误差变化率,而其输出则是因误差与误差变化率所产生的增益变化。可利用E来表示系统误差,用EC表示误差变化率,而其增益变化则分别由Kp、Kd、Ki进行表示,对E与EC的模糊子集进行选择,可得到{ZE,PO,PS,PM,PB},该模糊子集有着对应的论域,即[0,1],对Kp、Kd、Ki的模糊子集进行选择,可得到{NB,NM,NS,ZE,PS,PM,PB},在该模糊子集中也同样有着其对应论域,即[-6,6]。在其对应论域中找到隶属度函数,可了解其隶属度函数为三角形,通过对这两个论域的输入与输出变量进行确定,然后绘制其隶属度函数。在进行模糊自整定过程中,需要按照以下目标来进行:一是缩短系统的调节时间;二是降低系統在响应过程中的超调量;三是确保制动系统的制动性能保持稳定。
3 仿真结果
结合上文中对各个论域中的输入与输出变量,并绘制模糊控制表,然后根据该模糊控制量来做出模糊推理,除此之外,还要对加权平均判决的方法进行筛选,然后实施反模糊化,即可得出与Kp、Ki与Kd相对应的模糊推理曲面。在系统误差与误差率已知的情况下,能够得到PID控制器在应用过程中的比例系数、积分系数以及微分系数,其分别由Kp、Ki与Kd进行表示,使制动系统在制动控制过程中能够变得精准化。考虑到阶跃信号输入,需要分别对系统在常规PID控制器与史密斯模糊控制器两种情况下,实施自整定PID控制时所绘制出来的响应曲线进行对比,从对比结果可以了解到,采用常规PID控制器的情况下,制动系统在响应过程中的超调量较大,并且会产生明显的振荡,而且在控制稳态精度表现上要相对较差。而在采用史密斯模糊控制器的情况下,其仿真曲线中系统的超调量要少的多,而且进入稳定状态的时间要更短,系统所具有的鲁棒性以及稳态精度都大幅提升,不过,时滞环节的存在,仍然会对系统的制动控制性能产生一定的不利影响,只不过这种影响要相对较小。通过将史密斯控制与常规PID模糊控制进行结合应用,仿真结果表明,系统在制动控制时的响应时间进一步缩短,其超调量也更小,并且进入稳态状态的时间也更短,从而有效解决了纯时滞问题,该系统具有非常快的响应速度,并且兼具良好的稳态性能。通过对比上述3种控制方法,将史密斯模糊控制与常规PID模糊控制进行结合应用,可使时滞系统的控制品质得到明显提高,并且具有良好的动态表现。通过对汽车的制动性能进行验证,并对汽车在上述3种控制方式下所产生的制动车速变化情况进行曲线绘制,可以发现,在史密斯模糊控制与常规PID模糊控制进行结合应用的情况下,汽车制动时间明显缩短,并且车速变化也非常均匀,制动效果非常理想。
4 结语
总而言之,面对汽车在制动过程中纯滞后问题所带来的不利影响,该文以史密斯预估控制理论为指导,设计了相应的补偿环节来对控制输入端进行超前补偿,以此提高系统动态响应性能,使闭环传递函数中含有的时滞因子得到有效消除,并结合模糊PID控制方法,使史密斯模糊控制在应用过程中不再较大程度的依赖于制动系统模型的精确性,进而使自整定PID参数以及纯时滞补偿的优势得到了有效兼顾,达到了非常理想的制动效果。
参考文献
[1] 杨小龙,杨功正,张泽坪.基于多因素输入模糊控制的再生制动策略[J].湖南大学学报:自然科学版,2017,44(10):17-24.
[2] 宋士刚,李小平.基于模糊滑模控制的再生制动系统稳定性分析[J].机电工程,2016,33(2):197-201.
[3] 赵玲,唐岚,吴晓花.基于模糊控制的电动汽车前后制动力分配策略研究[J].机械,2014,41(4):18-21.
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
内蒙古教育·职教版(2016年11期)2017-01-05
科学与财富(2016年26期)2016-12-01
读者(2016年6期)2016-03-11
小小说月刊·下半月(2013年4期)2013-05-14
读者(2012年24期)2012-09-22
读者·校园版(2012年4期)2012-08-30
现代电子技术(2009年13期)2009-08-31
