高速跟驰交通流动力学模型研究*
2020-04-03 08:43陈永张薇
物理学报 2020年6期
陈永 张薇
1) (兰州交通大学电子与信息工程学院, 兰州730070)
2) (兰州交通大学交通运输学院, 兰州730070)
(2019 年 8 月 19日收到; 2019 年 10 月 30 日收到修改稿)
为研究道路交通中的高速跟驰物理现象, 针对高速跟驰车辆特点, 综合考虑了驾驶员换道决策行为以及随机慢化等因素, 结合前景理论等方法, 提出了一种用于模拟道路交通流中高速跟驰物理现象的动力学模型(简称HCCA模型). 通过计算机数值模拟, 研究了高速跟驰交通流物理现象演化机理及高速跟驰特性. 结果表明: 与对称的双车道元胞自动机动力学模型相比, 本文建立的HCCA动力学模型能够再现道路高速跟驰物理现象, 并得到了道路小间距高速跟驰率超过7%的结果与实测结果相符合, 最后模拟得到了丰富的交通物理现象, 再现了自由流、同步流及运动阻塞等复杂交通物理现象.
1 引言
交通流理论是运用物理学、数学和力学等原理方法来描述交通特性的一门交叉学科, 它能够更好地解析交通物理现象及其本质, 提高道路的运营效率. 元胞自动机 (cellular automaton, CA)是一种定义在离散时间维度上通过空间局部规则并行演化的动力学模型, CA相当于传统物理学中的近距离作用的“场”, 它是模拟非线性复杂系统的一种有效动力学工具[1,2]. CA动力学模型广泛应用于物理、材料、社会学、非线性科学等领域的研究工作中[3−7].
CA动力学模型把交通流看作由大量粒子相互作用的复杂动力学系统, 通过对单个车辆动力学行为分析, 演化出整个物理系统的宏观性质, 从而实现对交通中各种物理现象的规律性研究, 国内外众多学者对此开展了大量的研究工作[8−13]. Nagel和Schreckenberg[14]提出的单车道NaSch模型是一种典型的CA动力学模型, 可模拟交通堵塞现象及时走时停波等物理现象. Chowdhury等[15]在单车道NaSch模型的基础上, 提出了对称的双车道元胞自动机 (symmetric two-lane cellular automata,STCA)模型, STCA动力学模型引入换道规则对道路换道交通流物理特征进行了研究; 彭莉娟和康瑞[16]建立了一种考虑驾驶员特性的CA模型,研究了驾驶员类型对交通流的影响; 董长印等[17]对混入智能车的下匝道瓶颈路段交通流进行了研究; Deng和Feng[18]考虑提出了一种基于层次分析的换道决策交通流模型; 郑亮等[19]从驾驶员对车速和间距判断行为角度, 建立了基于驾驶员行为的CA模型. 张柠溪等[20]考虑了司机驾驶行为差异, 引入相邻车辆的动态车间距, 提出一种改进的单车道CA模型; Krzysztof[21]研究了路段停车对交通流、速度和行驶时间的影响; Damian等[22]通过改进NaSch模型研究了变道和过度等待对道路交通的影响; Zhao等[23]考虑前车速度等因素, 建立了车联网环境下交叉口交通流的CA模型. 上述研究从不同角度模拟得到了许多交通物理现象, 揭示了交通流的内在特征.
然而, 交通流的自身特点和复杂性使得目前的交通流动力学模型仍然不能完善地解决交通问题.国内一些学者通过架设的视频采集设备长时间连续拍摄了国内上海、北京等典型大城市多个高架或快速路段的交通流录像采集, 建立了一个包含210920组交通流实测的大样本交通实测数据库,通过对这些实测数据的统计分析, 发现道路上存在一些车速较高的车辆, 车速大于它与前车的车头间距, 在数据集中的小间距车辆并非都是低速行驶,其速度明显高于通常处于该密度时应有的速度, 即存在“高速跟驰”现象[24]. 文献[24]指出传统的交通流模型无法模拟出“高速跟驰”现象, 需要新的交通模型对此物理现象进行描述和分析.
目前针对交通流动力学的影响性研究中, 大部分研究基于NaSch模型, 但是NaSch模型无法模拟出高速跟驰现象, 这是因为在NaSch模型安全防护中要求车速始终要小于或等于两车车头间距,不会出现车速大于车头间距的情况. 此外, 目前对于高速跟驰交通行为的部分研究中[2,20], 仅仅考虑了单车道行为, 未考虑换道条件下高速跟驰行为的分析, 显然单车道情况过于理想化.
针对目前交通流CA模型的不足以及高速跟驰物理现象缺乏有效动力学模型描述的问题, 本文以CA理论为基础结合前景理论等方法, 提出了一种高速跟驰交通流动力学 (highspeed carfollowing celluar automat, HCCA)模型, 利用此模型仿真分析了道路中高速跟驰车流物理现象演化机理和车辆高速跟驰特性, 研究结果对于道路高速跟驰物理现象解释与丰富交通流理论有一定的指导和参考意义.
2 现有双车道STCA模型局限性分析
在交通流理论中, NaSch模型是一个重要的交通流动力学模型, 但是NaSch模型是单车道模型,无法模拟出道路上驾驶员换道行为. Chowdhury等[15]在NaSch模型的基础上, 引入了换道规则,建立了STCA交通动力学模型. STCA模型换道车辆的空间关系示意图如图1所示.
图1中, 双车道STCA的演化过程中, 将每个演化时间划分为两个时间步: 第1个时间步内, 车辆按照设定的换道规则完成换道; 在第2个时间步内, 换道后按照单车道NaSch模型规则进行速度和位置的更新.

图1 换道车辆的空间关系示意图Fig. 1. Diagram of spatial relations of lane-changing vehicles.
其中, 第一个时间步换道规则需满足以下两个先决条件: 1)换道动机, 当前车道的驾驶条件无法满足驾驶员的驾驶需求, 此时如果旁道上的道路行驶条件优于当前车道上的行驶条件, 当前车辆会以概率进行换道; 2)安全条件, 换道过程中对自身车辆以及其他车辆是安全的. 根据上述换道规则的描述, 对于图1所示的右车道中车辆n对应的换道条件如下:
1)换道动机

2)安全条件

在第二个时间步内, 换道后的车辆均按照NaSch动力学规则进行演化:
3)以概率Pn(t+ 1)随机慢化
通过对现有双车道STCA模型规则分析, 可以发现目前的双车道STCA模型中, 存在如下问题.
问题1STCA模型无法模拟出“高速跟驰”现象. 这是因为通过对STCA模型分析可知,STCA模型在第二个时间步换道后采用的依然是NaSch单车道动力学模型演化, 在换道后安全防护规则是出于安全防护的目的, 在下一演化时间t+ 1内, 车速要求小于或者等于该车与前车的车头间距, 不会出现车速大于两车间距的情况. 根据“高速跟驰”的定义在道路上存在一些车速较高的车辆, 车速大于它与前车的车头间距, 显然根据STCA规则是无法模拟出“高速跟驰”的交通物理现象.
问题2STCA模型换道概率为固定值. 在STCA模型中当满足换道动机和换道安全条件后,左车道和右车道驾驶员驾驶的车辆在同样换道概率约束下进行换道, 显然这与实际交通情况不符. 在实际交通中, 驾驶员执行车道变化的主要原因是对当前行驶状态与驾驶期望值无法得到满足, 在车辆行驶的过程中不同类型的驾驶员对驾驶期望车速不同. 在换道过程中, 不同类型的驾驶员为适应交通环境应采取不同驾驶行为. 高速跟驰交通流实测文献[24]中也指出不同特征的驾驶员驾驶行为会影响到高速跟驰现象的发生, 驾驶员的行为会对交通特性有较大的影响. 在道路交通中, 一般将驾驶员类型分为激进型驾驶员和其他类型驾驶员[16,24]. 激进型驾驶员表现的特征为喜欢开快车, 较少采用刹车, 以便让车辆尽量向前行驶; 而其他类型驾驶员, 特征主要表现为以驾驶安全为主, 在驾驶的过程中一般与跟驰的车辆保持较大的跟车间距. 在STCA模型中, 未对驾驶行为进行细化, 对于不同类型的驾驶员换道频率均采取固定值, 存在较大的局限性. 在实际交通中, 换道频率应体现出不同驾驶员的换道决策过程, 换道频率不应采取固定值.
问题3STCA模型中道路随机慢化概率为固定值. 在STCA模型中, 在换道后车辆在各自车道上更新演化时, 所有的车辆都具有相同的随机慢化减速概率, 并且该减速概率值不会随着演化时间和道路环境的变化而动态调整变化. 显然STCA动力学模型采取固定减速概率值与实际道路交通情况不相符, 在实际的交通系统中, 每辆车的减速慢化概率应该是在每个演化时间t, 驾驶员根据道路情况不断实时动态调整变化的.
3 高速跟驰交通流动力学模型建立
针对STCA动力学模型上述存在的问题, 本文提出了一种HCCA模型, 用于对高速跟驰交通流物理现象演化机理及道路高速跟驰特性的分析.建立HCCA模型时, 从以下三方面对STCA模型进行了改进: 1)针对STCA模型无法模拟出“高速跟驰”的问题进行改进, HCCA模型中对于激进型驾驶员驾驶的车辆引入了考虑前车运动动态效应的预估车速; 2)针对原始STCA模型换道概率为固定值的不足, HCCA模型结合前景理论, 在换道选择时进行驾驶员换道决策代替固定换道概率;3)针对STCA模型道路固定慢化概率的问题进行改进, HCCA模型改进后根据前后车速度差和车间距实时进行慢化概率调整. 以下分别对三方面的改进进行具体说明.
3.1 高速跟驰模拟改进
通过对STCA模型分析可知, 在演化的过程中安全间距计算时采用的方法是将前车作为静止的粒子进行处理, 没有将前车的运动效应对两车间距的动态影响进行考虑, 从而导致不会出现车速大于它与前车的车头间距的情况, 即不会出现“高速跟驰”现象. 本文HCCA模型建立时, 结合激进型驾驶员在驾驶的过程中与前车保持较小跟驰间距的特点, 对于激进型驾驶员驾驶的车辆在跟驰间距计算时, 前车不再是静止的粒子而是考虑前车的动态预估车速, 将激进型驾驶员的安全防护过程修改为


通过上述改进后的HCCA交通动力学模型,克服了STCA模型无法模拟高速跟驰的距离约束问题, 同时又确保了换道车辆与周围车辆不会发生碰撞.
此外, 在换道过程中, 对于激进型驾驶员,STCA在换道动机判断时也未考虑旁道前车的运动效应. 本文HCCA模型建立时, 对于激进型驾驶员在换道过程中, 考虑前车的动态运动效应后对前车同样计算预估车速, 采用如下的规则进行判定:

3.2 换道概率改进
前景理论 (prospect theory)由 Kahneman和Tversky提出, 用来描述和预测人们在不确定条件下的实际决策行为的理论, 相比于期望效用理论存在先验主观的缺点, 前景理论更适合于描述面临风险和不确定性问题的选择过程, 其研究结果更符合人们的实际选择[25,26]. 在本文研究的驾驶员换道行为中, 在满足换道安全条件下, 驾驶员对于换道的选择就是一种不确定条件下的选择决策行为. 前景理论在决策选择时, 首先由决策者设定一个参照点, 并将决策的各种可能计算相对参照点的收益或损失; 然后决策者依据价值函数对收益和损失进行评价, 并依据决策权重函数计算后进行主观概率风险选择[25].
根据前景理论基本原理, 本文对驾驶员的换道决策相应的数学定义如下.
1) 换道行程时间前景值
每个驾驶员对到达下一个道路位置的时间有一个心理预期k:

换道后的行驶时间为t1:

不换道的行驶时间为t2:

(t)(t)表示2车道上前车i+ 1和1车道i车的相对间距,表示i车的速度,t1表示驾驶员如果换道计算得到的时间,t2表示驾驶员如果不换道计算得到的时间.
2)选择概率权重函数
方案i的收益为

方案i的价值为
在前景理论研究中, 经过大量测试, Kahneman[26]将参数标定为最符合决策者心理特征, 本文也采用同样的取值.换道后行驶中存在不确定性: 拥堵或不拥堵. 设拥堵概率为p, 计算驾驶员对拥堵的感知概率如下:
在收益时

在损失时

根据Kahneman[26]的标定, 参数取值为
3)计算换道或不换道的前景值
计算各驾驶员换道不同方案的前景值, 方案i的前景值EVi为

根据(11)式, 如果方案i的前景值EVi越大,说明方案i相对于驾驶员的收益越大, 驾驶员会选择前景值大的方案i进行换道决策.
3.3 慢化概率改进
在STCA模型中, 所有车辆的随机慢化概率的取值为常数, 与实际交通情况不符. 本文HCCA动力学模型构建时考虑了跟驰车辆之间速度相对差及两车安全间距等因素, 改进后每辆车的慢化概率Pn(t+ 1)的计算公式如下:


N为道路上车辆总数量.表示跟驰车辆之间速度相对差对随机慢化概率的影响值, 该函数值越大说明当前车辆具有较大的慢化减速概率, 反之慢化概率值较小.表示两车安全间距对随机慢化概率的影响值,
3.4 HCCA动力学模型演化规则
通过上述改进后, 本文建立的高速跟驰HCCA动力学模型演化规则定义如下.
1)换道条件, 当车辆满足以下条件时, 进行换道:

2)确定每辆车t+ 1时刻随机慢化概率

3) 加速过程:

4)安全防护过程:
①如果是激进型驾驶员, 防护为

②如果是其他类型驾驶员, 防护为

5)车辆n以概率Pn(t+ 1)随机慢化过程:

6)车辆运动:

这里a为车辆加速度,b为车辆减速度,xn(t+ 1)表示t+ 1时间车辆n在道路中的位置,dn(t)表示t时刻车辆n与前车n+ 1之间的距离,Pn(t+ 1)为车辆n在t+ 1时刻的随机慢化概率值, 该值通过(12)式计算得到;EVn为车辆n的换道决策前景值, 通过(4)—(11)式计算得到.
4 数值模拟与仿真分析
模型建立后, 在数值模拟过程中左右车道由长度均为L的离散格子组成, 采用周期型边界条件,每个元胞长度为7.5 m, 系统演化刷新间隔为1 s,当= 5 cell/s时, 对应的物理速度为 135 km/h.在数值模拟仿真时,L= 1000, 演化时步取演化104步, 为了消除初始随机值影响, 每次记录演化达到稳态的后1000步作为仿真时步, 迭代运行20次后样本数据取平均值, 车辆加速度a和减速度b均为 1 cell/s2. 初始时, 车道上激进型和其他类型的驾驶员驾驶车辆按比例Pa,Pn随机分布在左
右车道上.
4.1 高速跟驰物理现象模拟分析
为了验证本文提出的HCCA动力学模型的有效性, 下面对高速跟驰物理现象进行模拟和分析.文献[24]中通过拍摄国内上海、北京、西安、郑州等城市的快速路段的交通流, 发现在实测数据集中, 存在着“高速跟驰”的现象, 并且在小间距跟驰数据中, 发现存在超过7%的“高速跟驰”车辆. 为了便于与文献实测结果比较, 数值模拟时采用与文献[24]中相同的定义来描述高速跟驰, 即用车头间距与车速的比值进行定义, 通过HCCA动力学模型演化得到了5组激进型驾驶员不同占比下的小间距高速跟驰率结果曲线, 如图2所示.

图2 不同激进型驾驶员比例下高速跟驰率(a) 左车道高速跟驰率; (b) 右车道高速跟驰率Fig. 2. Rate of high speed car-following and denisty relationship diagram under the different probability of aggressive drivers: (a) Rate of high speed car-following in left lane;(b) rate of high speed car-following in right lane.
图2 中横坐标代表道路的车流密度, 纵坐标代表高速跟驰率, 其中图2(a)为左车道高速跟驰率随密度变化的关系图, 图2(b)为右车道高速跟驰率随密度变化的关系图. 从图2整体可以发现, 在左车道和右车道中, 无论激进型驾驶员在何种占比下, 高速跟驰率都会随着道路密度的增大呈现出先增大后减小的趋势. 这是因为车辆跟驰行驶时实际是一种粒子动力学系统, 道路上每辆车可以看作是一个粒子, 粒子之间保持一定的跟随间距避免碰撞, 在同一激进型驾驶员比例下, 在道路低密度区,车流中车辆基本处于自由流状态, 此时粒子之间跟驰前后间距较大, 不会出现当前粒子速度大于它与前方粒子间距的情况, 即高速跟驰现象不易出现.例如从图2(a)和图2(b)可以看出, 在左右车道低密度区, 例如左车道道路密度r小于0.12时、右车道道路密度r小于0.14时, 此时交通处于自由流状态, 不易出现小间距高速跟驰现象. 另外当在高密度区域, 由于道路中车辆密度非常大, 道路逐渐进入阻塞相, 此时也不会出现高速跟驰现象, 如左车道和右车道当道路密度大于0.52时, 此时进入堵塞相, 高速跟驰现象逐步消失. 在其余左右车道中高密度区均会出现高速跟驰现象, 而且小间距高速跟驰率整体随着道路密度的增大而呈现出减小的趋势.
对于文献[24]实测数据中发现的小间距存在超过7%的“高速跟驰”车辆统计规律, 从本文采用HCCA动力学数值模拟仿真得到的图2(a)中可以发现: 当左车道中激进型驾驶员比例Pa= 0.4情况下, 道路密度r为0.12时, 小间距高速跟驰率为8.56%; 道路密度r为0.14时, 小间距高速跟驰率为10.91%; 道路密度r为0.16时, 小间距高速跟驰率为11.17%, 上述结果符合实测数据中存在的小间距超过7%的规律. 同样在图2(b)中右车道也满足同样的规律, 例如当激进型驾驶员比例Pa= 0.2情况下, 道路密度r为 0.16时, 小间距高速跟驰率为 7.17%. 当激进型驾驶员比例Pa=0.4情况下, 道路密度为0.1时, 小间距高速跟驰率为 7.04%; 道路密度为 0.12时, 跟驰率为 8.73%等. 从以上数据结果可以发现, 本文建立的HCCA较好地再现了道路交通流中高速跟驰现象, 并且数值模拟结果与文献[24]实测统计结果相符合, 说明了本文建立的HCCA动力学模型的有效性.
为了验证本文建立的动力学HCCA动力学模型数值模拟结果与实测数据的拟合程度, 利用文献[27]中高架路实测数据包括上下班高峰时段、普通时段和雪天三个不同路况样本数据进行平均误差分析, 即把某一路况样本总共N次实测得到的车速数据与各种速度密度关系计算公式得到的对应速度进行误差比较, 平均误差计算公式如下:

采用本文HCCA动力学模型与文献[27]中Greenshields模型、Greenberg模型、Underwood速度计算模型进行平均误差比较, 结果如表1所列.

表1 不同速度密度关系计算的误差比较Table 1. Comparison of calculation errors of different velocity-denisty models.
通过表1可以看出对于不同的路况实测数据,采用本文建立的HCCA交通动力学模型相对其他速度密度计算模型的平均误差最小, 能够较好地拟合实测结果. 此外, 从图2可以发现如下高速跟驰物理规律, 在道路中高密度区间, 随着激进型驾驶员比例的增加, 相同交通流密度下的高速跟驰率也随之增大. 例如图2(b)中, 右车道交通流密度为0.16时, 当激进型驾驶员比例为0.2时, 高速跟驰率为7.17%; 当激进型驾驶员比例为0.4时, 高速跟驰率为11.59%; 当激进型驾驶员比例为0.6时,高速跟驰率为13.18%; 当激进型驾驶员比例为0.8时, 高速跟驰率为16.30%; 当激进型驾驶员比例为1.0时, 高速跟驰率为18.10%.
通过上述定量分析可以发现, 在实际车流中不同特征驾驶行为对交通流物理特性有较大的影响,在道路交通流中, 激进型驾驶员表现的特性是喜欢开快车, 与前车保持较小的车间距, 较少刹车, 让车辆尽量向前行, 在该驾驶特征行为下其速度明显高于通常处于高密度时应有的速度, 上述激进型驾驶员的驾驶行为是导致道路交通流中出现高速跟驰物理现象的主要原因. 此外, 在同一道路密度条件下, 当激进型驾驶员所占的比例越大时, 会导致道路上高速跟驰行为的车辆比例也随之增大, 从而呈现出高速跟驰率随着激进型驾驶员比例增大而增大的现象.
4.2 不同密度下时空特性分析

图3 r1 = 0.2, r2 = 0.1, 不同车道时空图(a) STCA 演化左车道; (b) STCA 演化右车道; (c) HCCA 演化左车道; (d) HCCA 演化右车道Fig. 3. Space-time diagrams of different lanes under the condition of r1 = 0.2 and r2 = 0.1: (a) Left lane evolution with STCA rules;(b) right lane evolution with STCA rules; (c) left lane evolution with HCCA rules; (d) right lane evolution with HCCA rules.
下面对不同密度条件下道路演化的时空特性进行分析. 仿真时取不同类型驾驶员混合比Pa=0.2,Pn= 0.8, 通过改变左右车道不同的车辆密度r1和r2, 仿真得到了不同车流密度下左右车道的时空分布图, 取其中不同密度下的三组模拟结果,如图3—5所示. 图3是在左车道交通流密度r1=0.2、右车道交通流密度r2= 0.1、STCA 换道概率为0.2、随机慢化概率0.2的条件下, 采用STCA模型与改进后HCCA交通动力学模型分别得到的时空图. 从图3可以看出采用原始STCA模型和HCCA动力学模型, 随着时间的演化左右车道基本都可以趋于交通流平衡状态. 但是采用STCA模型得到的左右车道时空图(图3(a)和图3(b)),与采用HCCA动力学模型得到的时空图(图3(c)和图3(d))相比较, 采用STCA模型在左车道和右车道相邻区域都出现了较多局部的拥塞情况, 拥塞呈现非规律性的特点, 拥堵空间分布与HCCA模型拥堵空间相比范围更广, 如在道路420 cell,450 cell, 500 cell, 650 cell, 900 cell等多处都出现了拥塞情况, 而且拥堵的范围随着时间拥堵进行反向传播, 拥堵持续时间更长, 如道路 450 cell处拥堵持续约750个时间演化步. 这是由于STCA模型采用固定换道概率和固定慢化概率而造成的,在STCA模型中所有车辆均采用同样的换道概率约束值, 导致车道间出现车辆频繁来回切换, 产生乒乓换道现象, 此时会造成小区域的交通振荡, 换道后在更新过程中因为采用固定慢化概率, 导致车辆无法动态调整减速值, 从而形成非规律性多处拥塞现象. 图3(c)和图3(d)是采用HCCA动力学模型得到的时空图, 与STCA模型相比, 拥塞现象大幅度减少, 局部小范围堵塞区域会快速消融, 这是因为改进后的HCCA换道决策过程不再采用固定换道频率, 而是考虑了驾驶员换道决策行为, 更加符合实际交通中驾驶员的行为特征, 该过程减少了乒乓切换现象的发生. 此外HCCA动力学模型采用动态实时慢化概率, 在道路演化过程中局部拥堵能够在较短的时间内进行消解, 大部分车辆可以快速恢复到自由流状态.

图4 r1 = 0.3, r2 = 0.1, 不同车道时空图(a) STCA 演化左车道; (b) STCA 演化右车道; (c) HCCA 演化左车道; (d) HCCA 演化右车道Fig. 4. Space-time diagrams of different lanes under the condition of r1 = 0.3 and r2 = 0.1: (a) Left lane evolution with STCA rules;(b) right lane evolution with STCA rules; (c) left lane evolution with HCCA rules; (d) right lane evolution with HCCA rules.
仿真实验时, 继续增大道路交通流密度以得到不同道路密度下的交通流时空分布特征, 首先增加单侧车道密度, 图4是在左车道交通流密度增加至r1= 0.3, 右车道保持交通流密度r2= 0.1条件下得到的时空图, 可以看出与图3相比, 当加大一侧左车道车流密度后, 随着车流密度逐渐增加, 在中密度车流情况下, 图4左车道和右车道较多区域出现了时走时停的交通波现象, 道路较多区域出现运动阻塞相, 并随着时间向车道上游传播, 堵塞带更宽, 不能在较短的时间内恢复. 在中高密度道路条件下, 采用固定换道概率的STCA动力学模型演化, 车辆的频繁换道行为会同时引起左右车道的交通车流波动. 图4(c)和图4(d)是采用本文建立的HCCA模型演化, 与采用STCA模型演化得到的图4(a)和图4(b)相比, 可以看出STCA模型演化存在大量无规则的抖动堵塞区域, 而HCCA模型演化后系统拥堵相明显减少, 堵塞相逐步趋于稳态, 大部分区域内车辆都处于畅行状态. 图5是在图3条件的基础上同时增加左右车道的道路交通流密度, 在左车道交通流密度r1= 0.3、右车道交通流密度r2= 0.2条件下得到的时空图, 可以看出随着密度的增加, 左车道和右车道出现了畅行相和运动阻塞交替转变的现象. 不同的是图5(a)和图5(b) STCA模型演化后依然存在着大量随机的自由流和拥塞流不规则重叠的部分, 堵塞区域不存在明确的自由流和堵塞流的分界线, 随机局部堵塞较难消融. 与采用STCA演化的左车道和右车道相比, HCCA动力学模型得到的图5(c)和图5(d)中, 左右车道演化过程中虽然也出现了交通拥堵现象, 但小的堵塞区域随着时间的演化在向上游传播的过程中会逐步消散, 出现了自由流和拥塞相清晰分离的相分离的物理状态. 这是因为HCCA模型克服了STCA模型采用固定换道概率的不足, 采用换道决策后, 驾驶员通过对当前行车过程中获取的收益或损失与个人驾驶期望进行匹配决策, 实时调整换道决策来调节自己的驾驶行为, 可以有效地减少局部堵塞区域的形成.
从上述三组不同密度下时空图分布可以看出,与STCA模型相比, 改进后的HCCA模型仿真结果表明拥堵能在更短的时间内消退, 相比于STCA模型采用固定换道概率、固定慢化概率的不足, HCCA模型中不同类型驾驶员可以根据不确定条件下的交通场景实施相应的决策行为, 从而使得交通流堵塞消融的效率更高, 交通更能保持畅通状态.
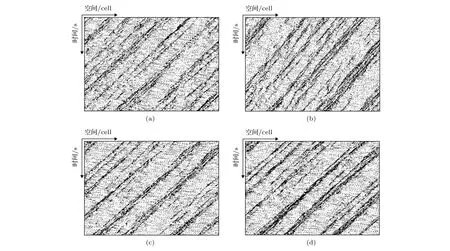
图5 r1 = 0.3, r2 = 0.2, 不同车道时空图(a) STCA 演化左车道; (b) STCA 演化右车道; (c) HCCA 演化左车道; (d) HCCA 演化右车道Fig. 5. Space-time diagrams of different lanes under the condition of r1 = 0.3 and r2 = 0.2: (a) Left lane evolution with STCA rules;(b) right lane evolution with STCA rules; (c) left lane evolution with HCCA rules; (d) right lane evolution with HCCA rules.
4.3 不同密度下速度分布分析
下面对HCCA模型稳定跟车状态下速度分布规律进行分析. 同样取不同类型驾驶员混合比Pa=0.2,Pn= 0.8, STCA 模型换道概率Pchange= 0.2,慢化概率P= 0.2, 仿真车辆最大车速为 5 cell/s.通过改变左右车道不同的道路密度r1和r2, 仿真得到了不同车流密度下的速度分布图. 当左车道和右车道密度均为0.08时, 得到了相应的速度分布如图6所示. 其中图6(a)与图6(b)是采用原始STCA模型得到的左车道和右车道在低密度下的速度分布图, 可以看出, STCA模型演化下左车道和右车道大部分车辆车速在4 cell/s到最大车速5 cell/s之间波动, 部分车辆受固定换道概率影响,速度波动较大. 在同等条件下改进后的HCCA动力学演化后速度分布如图6(c)和图6(d)所示, 可以看出采用本文提出的HCCA动力学模型的大部分车辆车速都维持接近最大车速5 cell/s处于畅行交通相, 这是因为在HCCA动力学模型下, 驾驶员可以根据道路情况实时调整慢化概率和换道决策行为, 在低密度道路情况下, 大部分车辆处于自由流驾驶情况, 个别车辆速度动态调整可以保持较高的行驶车速, 从而使得交通流保持更加平稳, 与实际情况较符.
在以上仿真条件下, 增加道路密度, 得到左右车道密度都是0.14条件下速度分布图. 此时道路处于中密度条件下, 从图7(a)和图7(b)的速度分布图可以看出, 采用STCA规则演化的车辆速度受固定换道概率影响较大, 固定换道行为容易引起局部交通冲突和振荡, 车辆速度变化剧烈, 部分车辆车速较低, 车速在时间和空间维度上发生了剧烈的无规则振荡, 部分区域出现短暂拥塞情况. 采用改进后HCCA模型的左右车道速度分布如图7(c)和图7(d)所示, 可以看出, HCCA模型相比于STCA模型速度无规则振荡情况明显减少, 大部分车辆可以保持最大车速行驶, 可以形成局部稳定的畅行交通流.
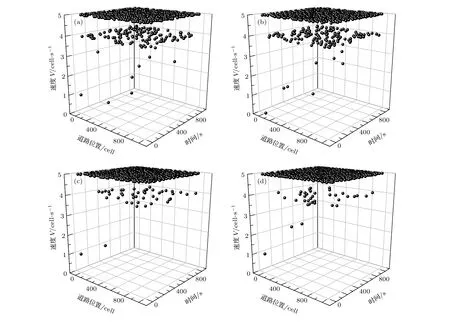
图6 r1 = 0.08, r2 = 0.08, 速度分布图(a) STCA 演化左车道; (b) STCA 演化右车道; (c) HCCA 演化左车道; (d) HCCA 演化右车道Fig. 6. Velocity distribution diagram of different lanes under the condition of r1 = 0.08 and r2 = 0.08: (a) Left lane evolution with STCA rules; (b) right lane evolution with STCA rules; (c) left lane evolution with HCCA rules; (d) right lane evolution with HCCA rules.
4.4 不同驾驶员混合比对交通流的影响分析
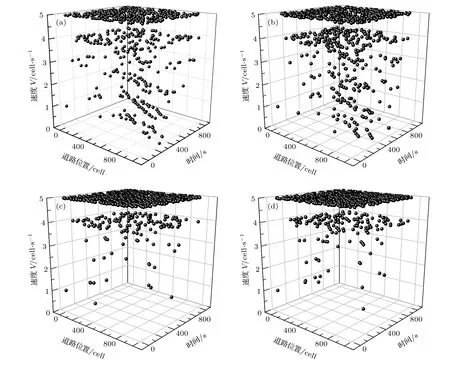
图7 r1 = 0.14, r2 = 0.14, 速度分布图(a) STCA 演化左车道; (b) STCA 演化右车道; (c) HCCA 演化左车道; (d) HCCA 演化右车道Fig. 7. Velocity distribution diagram of different lanes under the condition of r1 = 0.14 and r2 = 0.14: (a) Left lane evolution with STCA rules; (b) right lane evolution with STCA rules; (c) left lane evolution with HCCA rules; (d) right lane evolution with HCCA rules.

图8 不同类型驾驶员混合比下密度与流量关系图(a)左车道密度流量关系; (b)右车道密度流量关系图Fig. 8. Density and flow relationship diagram under the mixing probability of different type drivers: (a) Density and flow relationship in left lane; (b) density and flow relationship in right lane.
下面分析不同类型驾驶员混合比对交通流的影响. 将激进型、其他类型的驾驶员驾驶车辆取不同的混合比例Pa,Pn进行仿真分析, 初始化时随机分布在左右车道. 采用HCCA动力学模型对6组不同类型驾驶员混合比例下进行系统演化, 分别得到左右车道的密度流量关系图, 如图8所示.采用HCCA模型进行动力学演化后, 呈现出与交通流规律一致的曲线走势, 密度较小时, 斜率近似为直线的为自由流相, 随着道路密度的逐步增大,逐步向阻塞相转变. 从图8(a)和图8(b)可以看出,在左右车道低密度区, 不同混合比下左右车道都可以很快达到最大流量, 这是因为在低密度下, 车辆之间的间距较大, 换道行为影响较小, 大部分车辆都已处于自由流的交通状态中, 此时左右车道平均流量随密度的变化呈现线形增加关系. 此后从不同混合比例仿真曲线可以看出, 密度与流量的关系曲线会出现随着密度的变化逐步下降, 呈现出从自由流向阻塞流相变的过程. 在不同驾驶员类型混合比下, 流量与密度相变拐点不同. 在图8(a)中, 左车道中当车道上仅有激进型驾驶员Pa= 1.0时, 拐点密度r= 0.32, 大于该密度后交通流量基本逐渐呈现下降趋势; 当车道上激进型驾驶员比例Pa=0.8时, 拐点密度r= 0.3; 当车道上激进型驾驶员比例Pa= 0.2时, 拐点密度r= 0.2; 当道路没有激进型驾驶员只有其他类型驾驶员时(Pa= 0.0,Pn= 1.0)时, 拐点密度r= 0.14. 从图8仿真曲线还可以发现如下规律: 在道路中高密度区间内, 在同一道路密度下, 道路交通流量随着激进型驾驶员所占比例的增大而增大, 这一结论与文献[16]研究结论一致.
图8中通过HCCA动力学模型还可以模拟到STCA模型无法模拟得到的同步流交通现象. 例如在图8(a)中, 左车道中激进型驾驶员比例为Pa=0.4条件下, 在密度 [0.16, 0.32]区间; 激进型驾驶员比例为Pa= 0.2条件下时, 在密度 [0.2, 0.38]区间等占比情况下, 交通流量与道路密度数据之间无明确的关系, 呈现出无规则弥散分布的特点, 表现为STCA动力学模型难以得到的同步流交通物理特性. 通过对图8分析还可以发现以下物理规律:在同一密度条件下, 当激进型驾驶员占据驾驶员大部分比例时, 道路交通流量越大, 该结论与实际交通情况相符. 这是因为当道路中激进型驾驶员占比越大时, 大部分车辆会追求较小的跟驰间距和较高的行驶速度, 从而使得道路中的交通流量相应呈现出增大的趋势.
5 结论
针对道路交通流中存在着“高速跟驰”的物理现象, 即在小间距车辆并非都是低速行驶, 其速度明显高于通常处于该密度时应有的速度, 存在超过7%的“高速跟驰”车辆, 这些交通物理现象需要适当的非线性动力学数学模型去描述的问题. 本文在双车道STCA的基础上, 结合前景理论等方法,建立了一种模拟道路高速跟驰现象的HCCA模型. 模型建立时, 采用前景理论进行不确定条件下驾驶员的换道选择, 并结合激进型驾驶员的特点,对激进型驾驶员跟驰的前车考虑了动态预估速度,定义了HCCA动力学演化规则. 通过数值模拟再现了高速跟驰等交通流现象, 并得到了不同道路密度下不同特征驾驶行为下的时空特性、速度分布以及不同驾驶员混合比对交通流的影响分析. 结果表明: 1)本文HCCA模型能够对道路中的高速跟驰物理现象进行有效模拟, 得到的小间距高速跟驰率超过7% 的结果与实测结果相符合; 2) HCCA模型能够重现亚稳态、相分离、自由流、同步流等复杂的交通物理现象, 克服了传统STCA模型无法模拟得到同步流的不足; 3)激进型驾驶员的驾驶特征行为是产生高速跟驰物理现象的主要原因, 在同一道路密度下, 激进型驾驶员所占的比例越大,小间距高速跟驰率与交通流量也越大. 本文提出的高速跟驰交通流动力学模型对于解析高速跟驰物理现象和丰富交通流理论有一定的参考意义与实用价值.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
读者(2022年13期)2022-06-20
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
北京航空航天大学学报(2021年9期)2021-11-02
科学大众(2021年9期)2021-07-16
计算机系统应用(2019年6期)2019-07-23
汽车与安全(2017年7期)2017-09-12
小学生导刊(低年级)(2016年5期)2016-05-27