
一种机载星敏感器白天测星稳定性提升方法*
2020-03-29 14:00:36徐小慧赵东亮胡晓东张亚崇
弹箭与制导学报 2020年6期
徐小慧,赵东亮,胡晓东,张亚崇
(1 空军装备部驻西安地区第五军事代表室, 西安 710065; 2 西安飞行自动控制研究所, 西安 710065)
0 引言
惯性/天文组合导航以其高自主性和抗干扰性受到越来越多的关注,逐渐成为高精度自主导航的一种发展趋势[1]。作为天文导航的核心传感器,机载星敏感器在大气层内工作[2-3]。受太阳光、天空背景光等杂散光源的不利影响,对于星光信号的提取难度较大[4]。为实现机载星敏感器在强背景干扰下提取出微弱的星信号,可以通过多帧星图迭代的方法间接延长积分时间来提升信噪比[5]。由于航空器本体的旋转、移动、抖动等运动以及大气湍流扰动等因素的影响,星点会在探测器靶面上晃动[6],从而导致测星能力下降佳,甚至无法测星。因此,如何保证星图稳定是提升机载星敏感器测星稳定性的关键。
常用的稳像方法主要有:光学稳像、电子稳像和微机械稳像等[7]。其中,微机械稳像技术是利用微机械装置通过转动光学镜面或移动焦平面的位置来补偿外界对成像的影响,从而实现图像的稳定。该方法响应速度快、补偿精度高且对成像质量影响较小,是高分辨率成像系统首选的稳像技术。高速倾斜反射镜(fast-steering mirror, FSM)作为一种微机械装置,通过音圈电机驱动反射镜,可以实现快速、小角度光束偏转[8]。适用于机载星敏感器小幅度、高动态的稳像需求。中国科学院长春光学精密机械与物理研究所、长春理工大学等单位在高速倾斜反射镜的车载和机载精确指向、像移补偿等应用方面做了大量工作[9-10]。文中主要介绍了基于高速倾斜反射镜的微机械稳像系统在星敏感器中初步应用的情况,基本思想是利用基于高速倾斜反射镜的微机械稳像系统稳定星图,然后通过多帧星图迭代提升测星信噪比,进而提升机载星敏感器白天测星稳定性。
1 系统组成
图1 给出了稳像系统组成示意图,该系统由成像光学系统、相机、高速倾斜反射镜和信息处理单元几部分构成。其中,光学系统用于收集星光信号并汇聚到探测器的焦平面上,其采用反射式结构,可以折叠光路,从而有效减小系统长度。相机部分用于将光信号转换为电信号,生成星图数据信息,其采用短波红外波段观测恒星有助于降低天空背景提升探测能力。高速倾斜反射镜置于光学系统之前,独立于成像光学系统,便于装调。如图2所示,高速倾斜反射镜的闭环倾斜角度可达+2 mrad ,分辨率 0.05 μrad,镜面直径为150 mm,闭环线度0.2%,共振频率大于0.3 kHz,带宽大于50 Hz,射镜的面型精度优于λ/10。信息处理单元部分主要是FPGA ,用于星图处理及高速倾斜反射镜的控制。

图1 高速倾斜反射镜稳像系统示意图

图2 高速倾斜反射镜
2 系统工作原理
2.1 基本工作流程
系统工作流程如图3所示,主要包含初始化设置、背景采集及存储、星图采集及存储、星图预处理、星点质心计算、高速倾斜反射镜控制、多帧星图叠加等功能部分。初始化设置主要完成高速倾斜反射镜和相机的初始化。为适应不同的天空背景亮度,星敏感器相机的曝光时间采取动态调节的方法进行控制。根据星敏感器相机标定时得到的曝光时间与灰度的线性关系,计算当前天空背景亮度条件下相机最佳曝光时间。在实际使用过程中,考虑鲁棒性要求,曝光时间一般按照2的幂次方设为几档,例如:1 ms、2 ms、4 ms、8 ms、16 ms等。
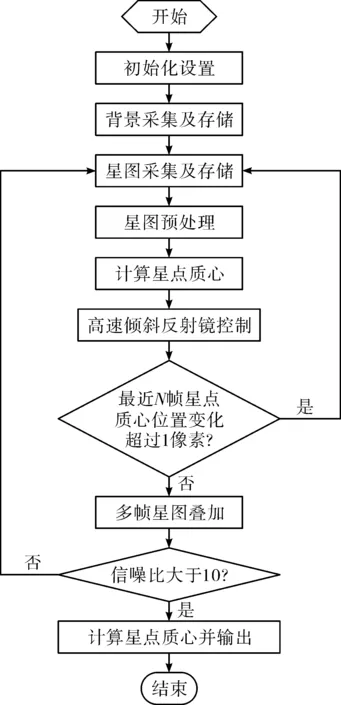
图3 系统工作流程图
2.2 星图预处理
虽然采用短波红外波段观测恒星有助于提升机载星敏感器的探测能力,但是短波红外探测器的噪声较大[12-13],尤其是在观测暗星时,图像的信噪比更低,这会极大地影响星点质心定位的计算。因此,在运行目标星图定位算法之前,还需要进行星图预处理,这里采用中值滤波结合扣除背景的方法控制噪声[14]。具体做法是,在开始正式测星前,先将星敏感器的视轴指向待测目标星附近的天空区域,采集多帧图像,将多帧图像求平均即可获得一个背景图像。该背景图像中还包括了当前条件下探测器的非均匀特性、坏元等固定噪声信息,如图4所示。在采集星图时扣除该背景图像,即可有效降低固定图像噪声对测星的不利影响。而对于随机噪声,则可以通过中值滤波的方法进行降噪处理。
2.3 星点质心计算
重心法具有更高的精度和抗噪稳定性,是常用的图像目标定位算法[15-16]。使用重心法计算一幅N×N的图像时,求出星点中心坐标(x0,y0)需要进行4×N2次计算。而在实际图像中,由于星点部分只占了图像的小部分区域,大部分的计算都是无用的非星点区域,存在较大的冗余计算量,效率较低。改进的算法是,首先遍历图像寻找图像中的灰度值最大值点(在对星图进行预处理以后,图像中灰度值最大值点为星点中的点),然后如图5所示,基于该灰度值最大值点选取一个K×K的窗口区(根据实际观测情况,K取9),最后在该窗口区中运用重心法求出星点中心(x0,y0),改进的重心法计算量为N2+4×K2。当K=9,且N较大时,可以看到,N2+4×K2≪4×N2,显然改进的重心法计算量远小于传统重心法。另外,由于改进的重心法计算的只有窗口部分的像素点,这将同时滤除掉图像其他部分噪声对于重心法计算精度的影响,提高了计算精度。
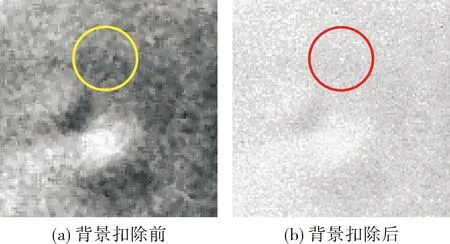
图4 背景扣除效果对比

图5 星图开窗
2.4 图像稳定
在图像稳定系统工作之前,首先需要通过伺服控制调整星敏感器,使被观测天体目标光斑恰巧落在图像中心位置[17-18]。在图像稳定系统工作过程中,控制软件通过实时算法计算出后续实时图像星点中心相对于图像中心像素的偏移量,进而得出高速倾斜反射镜控制器的控制量,通过高速倾斜反射镜快速补偿,确保星点始终落在光瞳中央附近,达到稳定光路、提高光学质量和观测效率的目的。
2.5 多帧迭代
经过高速倾斜反射镜稳像后,星点在星图中的位置相对稳定,这就为通过多帧图像累加提升星图信噪比提供了可能性[19-21]。文中提出基于帧累加的星图信噪比提升算法。假设星图尺寸为N×N,按照式(1)所给出的迭代公式建立矩阵Sk(m,n),m=1,2,…,N,n=1,2,…,N。

(1)
式中:k是迭代次数;Sk(m,n)是经过k帧迭代后获得的结果;Ik(m,n)代表第k帧星图数据;Mean(Ik(m,n))是第k帧星图Ik(m,n)的图像均值。算法初始化时,令Sk(m,n)=0。
为验证该算法的有效性,在Matlab中应用该迭代算法,对静态条件下测星获得的16帧星图数据进行处理,结果如图6所示。图中分别给出了经过2 帧、4 帧、8 帧和16帧迭代之后的矩阵Sk(m,n)的图像及数值表示。由图6可知,该多帧迭代算法可以有效提升星图信噪比。

图6 多帧迭代算法效果
多帧迭代是建立在星图稳定的基础之上的。若星点晃动较大,则该迭代算法将失效。因此,在迭代之前需要对星点晃动情况进行评估。假设迭代次数为k,则考察连续k帧星图的星点质心变化情况,当星点质心的标准方差(σ)小于1像素时,才将该组k帧星图进行多帧迭代。否则,认为星像不稳定,不执行迭代,返回继续采集星图。
最后,为确保测星的准确性,在进行最终的星点质心提取之前还需要对星图Sk(m,n)的信噪比按照式(2)进行评估。
(2)

3 试验与结果
如图7所示,在实验室搭建了测试平台,用带天空背景的星模拟器来模拟星光信号,用转台模拟载体运动。实验开始时,首先通过对准使星点在探测器上的位置调节至探测器中央。开启速率转台,带动星敏感器沿水平方向产生1°/s的角运动,通过星敏感器相机采集图像数据。

图7 实验装置
为验证高速倾斜反射镜稳像效果,设计了对比试验。首先,关闭高速倾斜反射镜,记录图像数据,并计算星图中心坐标(见图8)。然后,打开高速倾斜反射镜,记录图像数据,并计算星图中心坐标(见图9)。两组数据均为未经多帧迭代条件下的计算结果。数据为连续时间采集,由于时间相对较短,温度、杂散光等变化产生的影响忽略不计。实验中,选取图像中心坐标(128像素,128像素),该坐标将作为星点初始参考坐标。对比图8和图9可以看到,在不开启稳像系统情况下,图8中星点与载体运动轨迹一致。而开启稳像系统后,图9中星点质心变为围绕参考点附近一定范围变化。进一步进行重复实验,结果一致。上述实验结果说明,由于载体运动所导致的星点不稳定在使用校正系统后基本可消除。

图9 高速倾斜反射镜稳像但未经多帧迭代条件下星点质心坐标
为考察多帧迭代算法的效果,在实验开启高速倾斜反射镜稳像系统情况下,加测一组数据,利用多帧迭代算法计算图像星点中心坐标值(见图10)。
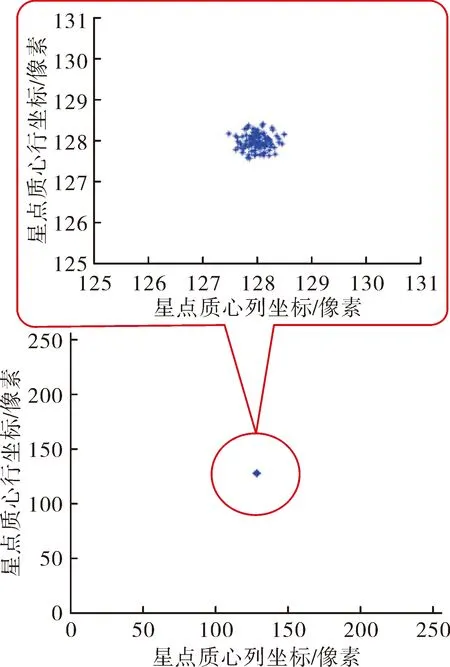
图10 高速倾斜反射镜稳像且经多帧迭代条件下星点质心坐标
对比图9和图10可以发现,使用多帧迭代算法计算的图像星点中心坐标值更稳定。将坐标数据进一步按坐标位置做出概率分布直方图。如图11所示,同样是在高速倾斜反射镜稳像系统情况下,仅通过单帧星图计算出的星点质心分布范围为4.3像素,而利用多帧迭代算法计算出的星点质心分布范围则低至0.9像素。

图11 星点质心坐标分布直方图
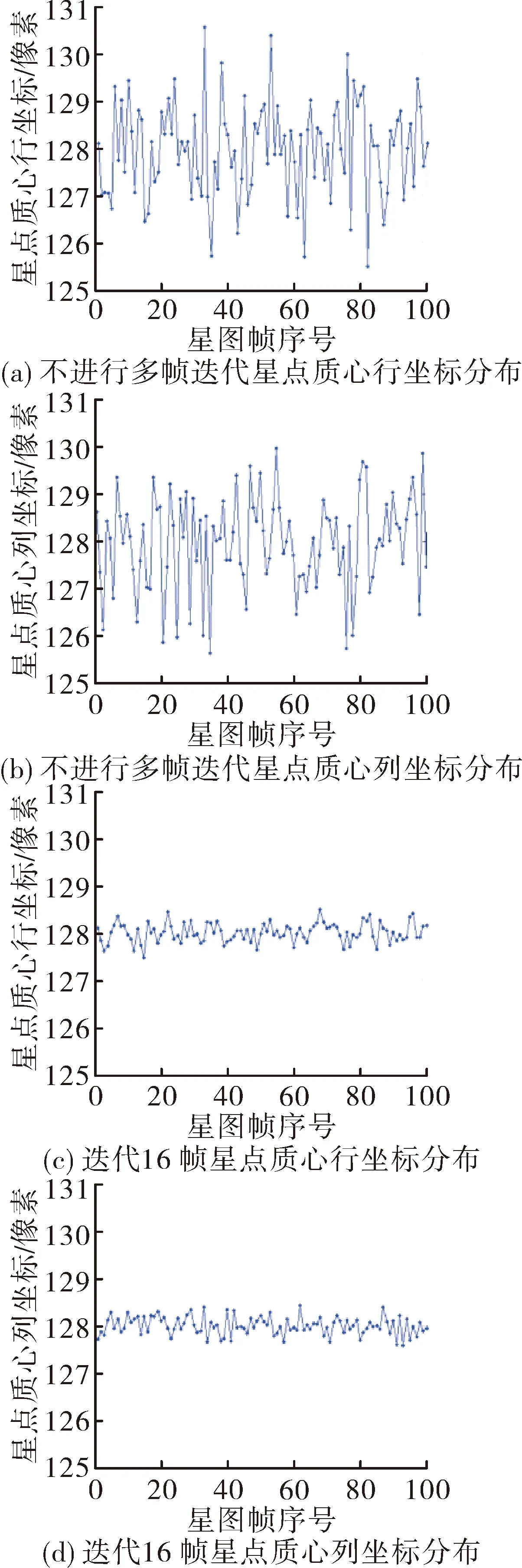
图12 星点质心坐标分布曲线
将计算获得的星点坐标数据进一步做一维坐标轴分析。如图12所示,同样是在高速倾斜反射镜稳像系统情况下,仅通过单帧星图计算出的图像星点中心坐标值标准方差为1.002(行坐标)和1.015(列坐标)。而利用多帧迭代算法计算出的图像星点中心坐标值标准方差则是0.193 3(行坐标)和0.201 9(列坐标)。数据稳定性提升约4倍,进一步印证了上述实验分析结论。
4 结论
针对机载星敏感器白天天空背景杂散光强、机载动态大的特点,提出了一种基于高速倾斜反射镜的微机械稳像系统,对载体旋转、移动、抖动所导致的星像不稳定有明显改善。经实验测试验证,基于高速倾斜反射镜的微机械稳像系统结合多帧星图迭代算法可将测星稳定性提升约4倍。未来的工作将会在此基础上对高速倾斜反射镜稳像工作频率、星图迭代帧数及门限阈值等参数进行优化,以进一步提高星敏感器的测星稳定性。
猜你喜欢
新能源科技(2022年9期)2022-11-20 19:28:56
数学物理学报(2022年1期)2022-03-16 06:15:00
环境技术(2020年1期)2020-03-06 11:41:02
现代装饰(2019年7期)2019-07-25 07:42:20
光学精密工程(2016年6期)2016-11-07 09:07:15
光学精密工程(2016年1期)2016-11-07 09:01:50
中成药(2016年4期)2016-05-17 06:08:05
测绘科学与工程(2016年4期)2016-04-17 06:51:10
中成药(2014年9期)2014-02-28 22:28:51
食品科学(2013年8期)2013-03-11 18:21:19
