
工业机器人在货物搬运案例中的编程方法探讨
2020-03-28 17:38马中辇
现代职业教育·高职高专 2020年29期
马中辇

[摘 要] 工业机器人可以代替人从事危险、有害、有毒等恶劣工作场合中的工作,也可以代替人完成繁重、单调的重复劳动,在解放人力劳动的同时,大大提高劳动生产效率,保证产品质量。工业机器人还可以与数控机床、自动检测系统等结合,组成智能制造生产线,实现生产自动化。随着机器人应用的普及,机器人逐步出现在各个企业车间和学校教学场所。利用一个简单的搬运案例,探讨机器人编程的一个基本思路:首先是任务分析绘制项目实施流程图;其次是工作过程分析绘制工作流程图;最后是根据任务要求编写符合工作需求的程序。通过本案例的探讨,给初学者提供一个完整的机器人编程工艺流程,方便初学者更好地理解和掌握。
[关 键 词] 机器人;货物搬运;发那科系统
[中图分类号] TP242.2 [文献标志码] A [文章编号] 2096-0603(2020)29-0232-02
国际标准化组织(ISO)对工业机器人的定义为:“一种能自动控制、可重复编程、多功能、多自由度的操作机,能够搬运材料、工件或者操持工具来完成各种作业。”
一、机器人本体
机器人本体也就是我们常说的机械部分。机器人本体与控制器之间的连接线有两根,这两根线连接控制器的一端已经接好,而连接机器人的一端公用一个插口。机器人本体主要由两大系统组成。
(一)驱动系统
它的作用是提供机器人各部分、各关节动作的原动力。驱动系统传动部分可以是液压传动系统、电动传动系统、气动传动系统,或者是几种系统结合起来的综合传动系统。
(二)机械结构系统
工业机器人机械结构主要由五大部分构成:基座、腰部、大臂、小臂和手腕,每一个部分具有若干的自由度,构成一个多自由的机械系统。末端操作器即工具是直接安装在手腕上的一个重要部件,它可以是多手指的手爪,也可以是喷漆枪或者焊枪等作业工具。
二、控制器
控制器相当于机器人的大脑,可以直接或者通过人工对机器人的动作进行控制。控制系统主要是根据机器人的指令程序以及从传感器反馈回来的信号驱动执行机构去完成规定的运动和功能。根据控制原理,控制系统可以分为程序控制系统、适应性控制系统和人工智能控制系统三种。根据运动形式,控制系统可以分为点位控制系统和轨迹控制系统两大类。
三、示教器
示教器是使操作人员参与机器人控制并与机器人进行联系的装置,简单来说该部分可以进行指令给定、信息显示和示教等操作。在使用时,左手穿过固定带握住示教器,右手可用于操作示教器上的相关按键,示教器背面的两个安全开关,按下任意一个即可。
四、搬运任务要求及其分析
(一)任务要求
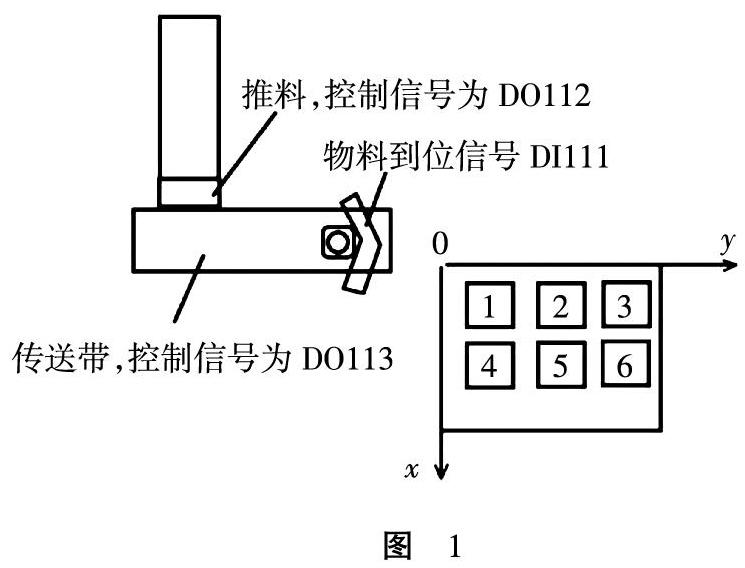
如图1所示,料仓为竖直放置,由推料气缸负责物料的推出;传送带负责将物料运输到固定位置;机器人负责将六个相同物料按照图示顺序放置在相应的固定位置。以发那科机器人为例,进行工艺分析并编写搬运程序,完成示教与程序调试。
(二)任务分析
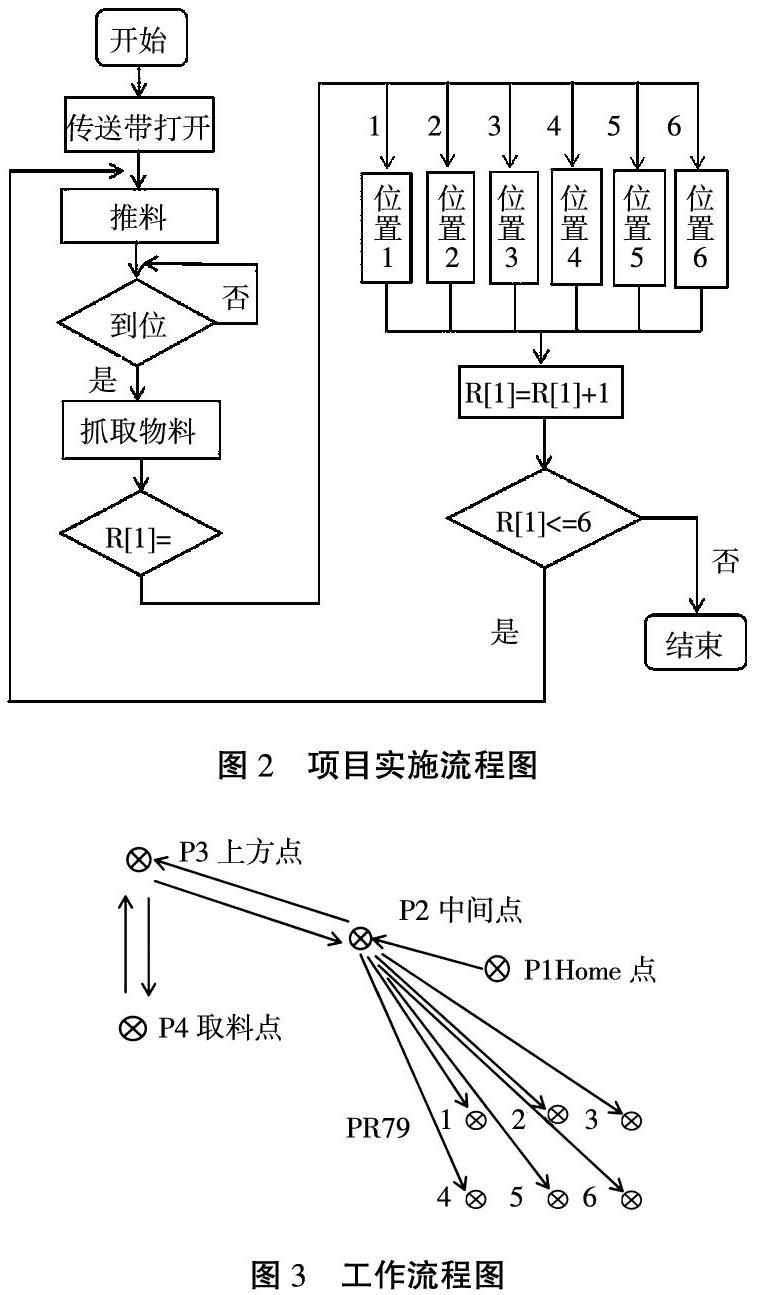
1.根据任务要求绘制项目实施流程图(见图2)
启动设备,首先打开传送带(由机器人输出信号DO113控制);推料气缸动作1.5S,推出物料(由机器人输出信号DO112控制);物料由传送带运输至规定位置等待,由机器人输入信号DI111负责到位信号采集,物料到位机械手抓取;物料未到位则继续等待。通过数值寄存器R[1]中数值判断物料放置位置;物料放置结束寄存器数值自动加1,判断R[1]是否小于、等于6,如果成立,继续执行取料放料,如果不成立则程序结束。
2.根据控制功能要求绘制工作流程图(见图3)
从工作流程图中可以看出机器人在工作中,中间点、上方点和取料点是固定不变的,需要改变的是放置位置。改变放置位置可以有以下几种方法。
(1)示教取点法,通过示教的方式取得1~6个点的具体位置。
(2)坐标偏移法,通过示教的方式取得位置1的坐标,并记录在位置寄存器PR[78]中,由于每个放置位置在x和y方向的间隔相等,所以可以通过坐标偏移,将偏移值记录在位置寄存器PR[79]中。
选择放置位置使用SELECTR[1],CALL调用子程序的方式实现,也可以通过JMP跳转的方式实现,在实际编程中使用调用子程序的方式较为简单,所以本项目采用该方式,最后使用IFR[1]<=6作为结束判断条件。
五、项目实施
(一)建立工具坐标系(采用6点法),命名为1
步骤:(1)MENU—设定—坐标系—F3(坐标)—ToolFrame—光标移到数字1—F2(细节)—F2(方法)选择6点记录法。
(2)COORD切换坐标至时间坐标系移动至目标最上方,光标移到“参考点1”——按SHIFT+F5(位置记录),同样的方法依次完成“参考点2”“参考点3”“坐标原点”。
(3)x轴方向移到100mm,记录位置,完成x轴方向建立。
(4)y轴方向移到100mm,記录位置,完成y轴方向建立。
(二)建立工件坐标系(3点法)
(三)SHIFT+COORD调用已经建立的Tool1和User1
(四)COORD切换至工件坐标系,完成编程准备工作
(五)建立子程序
参考文献:
[1]高赛,刘峰善.工业机器人智能运动控制方法的探讨[J].科技创新导报,2019(12):9-10.
[2]邵军.离线编程示教的工业机器人教学研究[J].湖北农机化,2019(16).
编辑 常超波
猜你喜欢
百科探秘·航空航天(2022年6期)2022-06-28
青少年科技博览(中学版)(2022年1期)2022-03-28
中国自行车(2022年1期)2022-02-13
机电工程技术(2021年3期)2021-09-10
科技创新与应用(2018年23期)2018-09-13
电子技术与软件工程(2018年1期)2018-03-22
科教导刊·电子版(2016年36期)2017-04-22
发明与创新·大科技(2016年10期)2016-10-22
高中生学习·高二版(2014年1期)2014-02-14
