
大载荷无人机安全着陆纵向控制策略设计探讨
2020-03-27 08:49:02王征利
探索科学(学术版) 2020年12期
王征利 李 杰
中国人民解放军32033部队 海南 海口570100
大荷载无人机在运输、续航、执行任务等方面有显著优势,在实践中的优势日益凸显。为了提高载荷能力和留空能力,大荷载无人机通常使用大翼展、大升力翼型和活塞发动机等,从而提高自身的升阻比,减少油耗,提高续航能力。但低速特性和大升阻比造成大荷载无人机在着陆过程中安全裕度比较小,加之其控制策略一般是使用升降舵控制其相对高度和待飞距,这造成大荷载无人机在着陆过程中抗风干扰能力较差、安全性不高,难以适应多种工况的要求。所以,探讨大载荷无人机安全着陆纵向控制策略设计有重要意义,有助于提高其着陆安全性。本研究选择某大载荷无人机为研究对象,分析其在传统控制策略下安全性不高的原因,设计了安全系数较高的着陆纵向控制策略,对其有效性进行验证。
1 问题论述和机理分析
1.1 着陆过程 无人机按照跟踪着陆轨迹完成不同着陆阶段的过渡,如图1所示,在整个着陆工程中,主要由进场平飞段、陡下滑段、轨迹捕获段、地面滑跑段及末端拉起段等组成,其中轨迹参数如表2所示。
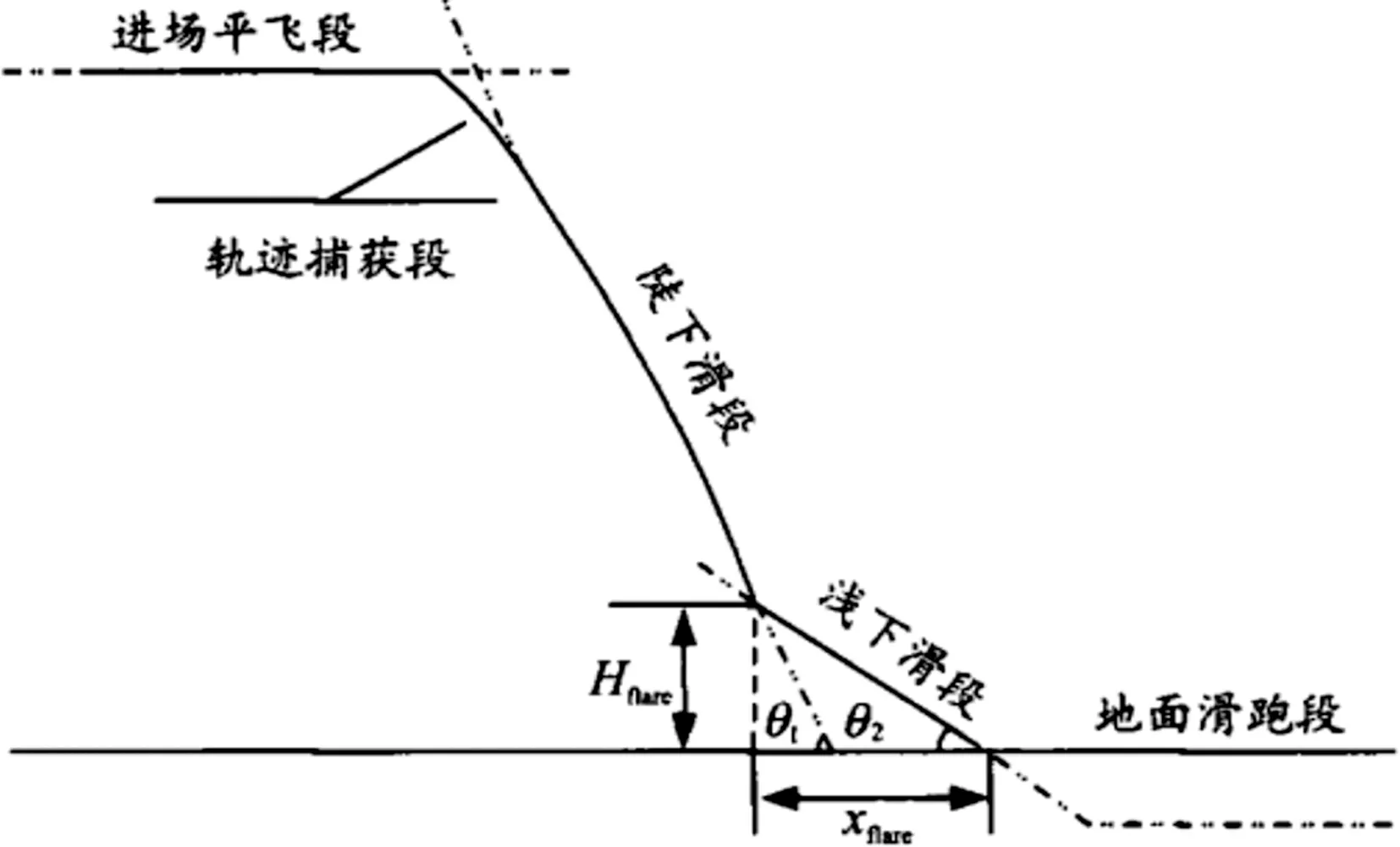
图1 无人机着陆过程

表2着陆轨迹线参数
在着陆初期,无人机首先要放下襟翼、起落架等装置,滑入进场平飞段,按照着陆架构型调整其控制策略,让无人机对平飞轨迹线进行追踪,并让其在平稳状态下进入下滑阶段。在无人机与下滑线和平飞线的交点接近时,要从原来的平飞模态转变为下滑模态。陡下滑段中,无人机结合预设的下滑轨迹线对其误差进行调整,并适当下降飞行高度。在无人机到拉飘高度时,要适当调整其飞行速度和下沉率,保证无人机的安全着陆。地面滑跑段指的是无人机触地后直至停止的阶段。在无人机降落的操作过程中,要慢要稳,这是因为无人机在距离地面30公分时会出现地面效应,要等到悬停平稳后在收紧油门,操作要尽量柔和。在落地后,要确保油门收底5s,在电机自动加锁后松杆,在加锁时要防止手动掰杆加锁。一方面,手动掰杆加锁操作复杂,另一方面手动掰杆加锁造成电机马上停止,若养成了手动掰杆加锁的习惯,则可能会造成无人机“炸机”的情况,从而让无人机降落时更加安全。因此,在无人机降落过程中,应先把无人机稳定在上方3-5米处悬停,把飞行模式调整至GPS模式,然后对无人机执行自主一键降落。
1.2 问题描述与机理分析
1.2.1 传统着陆纵向控制策略 在大荷载无人机的传统控制策略中,制导是通过升降舵追踪轨迹高度指令的估计控制,而由待飞距和轨迹线倾角计算其高度,其中待飞距指的是无人机按照获得位置信息带入着陆航段解得到和目标着陆点的飞行距离。浅下滑段的高度指令如图3所示。其中轨迹控制回路应用PI结构来确保着陆精度,而PD 结构是姿态控制,在浅下滑段要借助俯仰角的更改来改变无人机姿态。

图3 传统着陆纵向控制策略结构
1.2.2 传统控制策略下的着陆仿真结果 传统策略下,无人机在浅下滑段-5 m/s阵风扰动下的飞行过程如图3所示。614.3s时无人机进入阵风区域,速度增加的同时升力增加,快速飘高。623.1s时阵风停止,开始快速掉高。但这时无人机的迎角并无增大,提高升力,并在轨迹控制回路的影响下减小迎角追踪轨迹线,造成俯仰角不断减小,下沉率增加,增加了掉高过程。在623s时,这时无人机的下沉速率为-2.4 m/s,俯仰角为-0.5°,这是安全裕度变小,但无人机处于轨迹上方,其轨迹控制回路的输出不断减小。无人机在625s比轨迹线要低,这时无人机在轨迹控制的作用下增加迎角,但这时的下沉率较大、地面较近,仅凭借升降舵很难提高其升力,难以成功着陆,最后在0.1°俯仰角和-2.6 m/s的下沉速率触地(图4所示)。

图4 无人机着陆全过程
根据仿真结果得出:常规控制策略下无人机在浅下滑段抗风干扰的能力不强,为了提高无人机的着陆安全性,应在原方案不足的分析基础上予以改进。
1.2.3 常规高度制导策略的不足 由待飞距解算高度指令时的飞行示意图如图5所示。假设A 点是无人机初始的飞行点,B点是下一时刻轨迹的期望位置。无人机处于A点时,因受到风扰动的干扰,航迹倾角会变大,至于下个时刻会飞行到C点,这时无人机位于轨迹线上方,则要借助轨迹控制减小迎角,对轨迹线进行追踪,提高着陆精准度。在相关干扰因素下,无人机要减少自身的舵面,升高迎角,确保触底下沉率的着陆安全性。但受到高度指导策略的影响,首先增加舵面,缩小迎角,在提高着陆精度的过程中,忽略了其着陆的安全性,最后无人机触地时的下沉率比较高。只有无人机在轨迹下方,轨迹控制和姿态间有共同的迎角需求时,才能实现姿态角安全性的最大化,所以,在这种由待飞距离计算下的高度,其制导策略在抗风干扰时的着陆安全性并不高。

图5 待飞距解算高度指令飞行
2 安全着陆纵向控制策略
2.1 控制方案设计 无人机在阵风干扰的影响下,为了让其安全着陆,首先应修改其浅下滑段的制导策略。因为由待飞距设计轨迹控制指令存在安全性较低的问题,这主要是因为把轨迹指令转换为相对高度的计算,并在受到干扰后实现触地安全,使用追踪下沉率指令的轨迹控制策略。因为这时的轨迹指令主要是按照相对高度变化的下沉率计算,让无人机受到风的影响而不能根据原计划着陆,主要是按照离地面的相对高度重新生成着陆轨迹指令,从而保证其触地安全,如图6所示。

图6 基于下沉指令的着陆过程
根据图6得知:无人机根据初始的浅下滑轨迹飞行到A点,受到风的干扰后飘高至B点,这时无人机并不会对初始目标轨迹线进行追踪,而是和地面的相对高度生成修正轨迹线,所以无人机能对下沉率指令予以追踪,最大限度保证着陆安全。但是,单独改进制导策略尚不能确保着陆的安全性,应受风干扰掉高后,对其下沉趋势进行抑制。伴随无人机自身结构的改进,大荷载无人机一般会在普通执行的前提下改装传统副翼,从而弥补其不足。通过协调控制转动运动升降舵、移动运动操纵结构,以此改善无人机航迹控制的混合控制。值得注意的是,单独使用襟副翼控制轨迹会对无人机着陆的升阻特性造成破坏,且会干扰其速度通道。在无扰动着陆飞行过程中,通过襟副翼控制轨迹,会直接影响其精度。
2.2 控制结构设计 在早期的研究中,氢燃料电池并不被看好,研究中也出现过稳定性差,易燃易爆等问题。
但经过多年的研发,已经有了完整的安全解决方案,并且氢气很轻,逃逸速度极快,在非密闭空间内,就算产生明火也不会引起爆炸,而且与汽油等不同,氢气燃烧是向上的,没有横向延展的危险。在无机人的安全着陆控制结构中,把升降舵通道的高度控制回路转为下沉率的控制。在这个前提下,通过对襟副翼进行监测保护,能借助襟副翼向其提供升力,从而最大限度提高触地下沉率的安全性。
2.3 参数设计 首先要设置下沉率的指令参数,为了确保无人机的安全触地,通过把触地目标下沉速率设定为-0.5 m/s。因为无人机在陡下滑过程中的俯仰角是-1.5 °,触地俯仰角目标值是2.5 °,俯仰角指令上升时间是1.5 s。所以,在浅下滑过程中设计的时间为10s,确保其有充足的时间拉起姿态。尽管襟副翼下沉率指令的响应速度较快,但这会对速度通道产生了不同程度的干扰,造成无人机在襟副翼轨迹增加后,速度响应升高。从增大的作用时间上看,襟副翼在速度通道中的干扰较小,同时也不会让速度通道发散。所以,在无人机出现风干扰时,能借助襟副翼和升降舵的混合控制,从而保证其安全着陆。
综上所述,本文应用制导策略改进为以相对高度为基础的下沉率控制,设计出升降舵和襟副翼,同时对无人机航迹控制制定了混合控制策略。结果证明了安全着陆控制策略的高效性,能在提高其着陆精准度的同时,提高无人机的抗风着陆性能,从而让无人机更好地适应不同的环境。
猜你喜欢
船海工程(2023年2期)2023-04-27 13:07:20
青年文摘(2022年13期)2022-12-07 15:23:57
智能制造(2021年4期)2021-11-04 08:54:42
西安航空学院学报(2021年3期)2021-10-14 10:34:04
民用飞机设计与研究(2020年1期)2020-05-21 07:24:44
智富时代(2018年11期)2018-01-15 09:52:06
北京航空航天大学学报(2017年3期)2017-11-23 05:14:23
体育时空·上半月(2017年4期)2017-05-05 03:08:39
东西南北(2017年1期)2017-02-22 18:26:24
中国科技信息(2016年14期)2016-07-31 21:16:55
