
双绳缠绕式提升机钢丝绳张力仿真及试验验证
2020-03-27 02:26许亚萍李济顺邹声勇
矿山机械 2020年1期
许亚萍,杨 芳,李济顺,,,邹声勇
1河南科技大学机电工程学院 河南洛阳 471003
2河南科技大学河南省机械设计及传动系统重点实验室 河南洛阳 471003
3矿山重型装备国家重点实验室 河南洛阳 471039
矿井提升装备是矿产资源开采的关键设备。国内常见的提升机类型为单绳缠绕式提升机和多绳摩擦式提升机。然而,单绳缠绕式提升机的钢丝绳和卷筒直径会随井深增大而大大增加,造成设备庞大、制造困难;多绳摩擦式提升机随开采深度增加,钢丝绳张力变化过大,从而严重影响钢丝绳的使用寿命,故两者均不适用于大于 1 500 m 的超深井提升[1]。多绳缠绕式提升机拥有单绳缠绕式提升机的缠绕特性,且具备多绳摩擦式提升机大载荷的提升特性[2],能很好地弥补以上两者的缺陷,适合于深部矿产资源的开采,例如南非的多绳缠绕式提升机已被应用到 2 500 m 井深[3]。在国内,该类型提升机的研究工作仍处于起步阶段,因此研究双绳缠绕式提升机对于我国深部资源开采具有重要的意义。
国内外学者在提升系统建模方面已有一定研究基础。S.Kacxmarczyk 和 W.Ostachowicz[4-5]建立了钢丝绳悬绳段的横向振动及悬垂段纵向振动的耦合振动方程,以此为基础研究提升过程中钢丝绳的动力学特性。曹国华等人[6]研究了变质量提升系统的振动特性,建立提升钢丝绳轴向和扭转的耦合振动模型,得到在振型函数随系统质量变化或同定不变的情况下,钢丝绳振动响应的求解办法。朱真才等人[7]建立了箕斗装载过程中钢丝绳的纵向振动微分方程,通过振型叠加及数值计算的方法分析装载过程中钢丝绳的振动响应。龙靖宇等人[8]用小球体来模拟钢丝绳,但不适用于钢丝绳大柔性变形的情况。晋民杰等人[9]利用 ADAMS 的宏命令快速建立钢丝绳动力学模型,基本实现钢丝绳的参数化建模。刘义等人[10-11]利用ANSYS 和 RecurDyn 仿真软件建立单绳缠绕式和多绳摩擦提升机的虚拟样机模型,仿真与试验的对比结果验证了仿真模型的合理性。
上述研究主要针对单绳缠绕式提升机和多绳摩擦式提升机,对多绳缠绕式提升机的钢丝绳动态特性研究还处于起步阶段。本项目针对双绳缠绕式提升机,利用 RecurDyn 软件建立提升机虚拟样机,并开展了双绳缠绕式提升机张力变化的试验研究,通过对比仿真和试验结果验证了建模方法的有效性。
1 双绳缠绕式提升机拓扑结构
双绳缠绕式提升机的主要构件有驱动主轴、卷筒、天轮、提升钢丝绳、罐道、罐笼等。系统结构如图 1 所示。

图1 双绳缠绕提升机结构示意Fig.1 Structural sketch of double-rope winding hoist
为了明确提升机各部件之间的连接关系,建立了双绳缠绕式提升机的拓扑结构,如图 2 所示。拓扑图中各部件名称如表 1 所列,拓扑图中各约束名称如表2 所列。

图2 提升机拓扑图Fig.2 Topological diagram of hoist

表1 部件名称Tab.1 Name of components
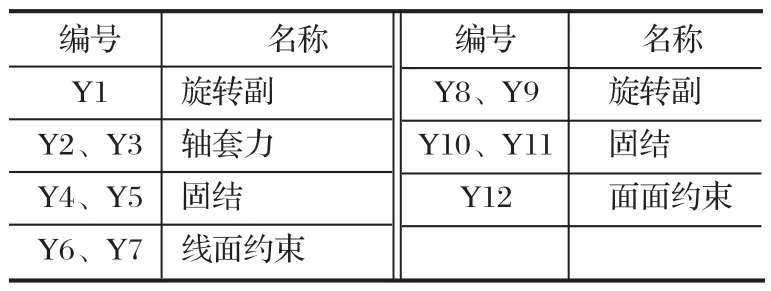
表2 约束名称Tab.2 Name of constraint
2 虚拟样机模型
2.1 建模流程
首先做如下假设:①2 个提升卷筒同轴且直径相等,2 根驱动轴连接,同步同速驱动;② 不考虑各零部件之间的运动副间隙;③忽略提升容器所受的空气阻力;④ 所有无相对位置变化的部件假设为一个整体。
将钢丝绳视为柔性体,主轴、卷筒、罐道、罐笼及配重视为刚性体进行建模。利用 CATIA 的三维建模功能联合多体动力学仿真软件 RecurDyn,通过三维实体建模、柔性体建模、添加约束、设置边界条件等步骤,最终完成对双绳缠绕式提升机虚拟样机的建模,建模流程如图 3 所示。
2.2 实体建模
2.2.1 刚性体建模
在 CATIA 软件中建立主轴、卷筒、天轮、罐笼及罐道的三维模型并完成装配;导出为 step 格式文件,导入 RecurDyn 软件中;将罐道建立在 Ground 环境中。添加各部件间约束如下:
(1)主轴与大地间定义旋转副,添加驱动函数实现提升机的驱动工作;
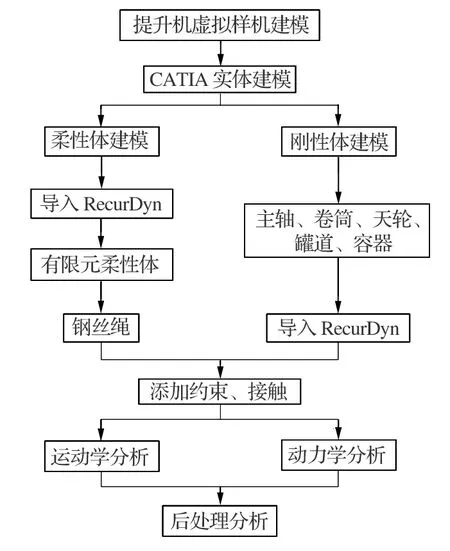
图3 虚拟样机建模流程Fig.3 Modeling process of virtual prototype
(2)主轴与卷筒间用轴套力连接;
(3)天轮与大地间定义旋转副;
(4)罐耳与罐笼间定义旋转副;
(5)罐耳与罐道间定义为面面接触;
(6)在罐笼下方建立一个矩形体,与大地间定义固定副,矩形体与罐笼间定义为面面接触;
(7)通过改变罐笼质量来模拟多种负载工况。
2.2.2 柔性体建模
在 RecurDyn 柔性体模块中,梁单元的每个节点都有 6 个自由度,利用截面面积和 2 个面的惯性矩以及扭转常数来描述单元的拉伸、压缩、扭转和弯曲等行为。在 CATIA 中建立钢丝绳线体模型,并将其导入 RecurDyn 中,利用 Beam 梁单元模拟钢丝绳。设置钢丝绳材料属性,根据式 (1)设置单元横截面积、扭转惯量及面极惯性矩等参数。钢丝绳与卷筒间添加球铰副,定义为柔性体与刚性体的面面接触;钢丝绳与天轮间定义为柔性体与刚性体的面面接触;垂绳段钢丝绳绳端与罐笼间添加固定副。

最终得到的双绳缠绕式提升机虚拟样机模型如图 4 所示。
2.2.3 钢丝绳接触参数计算
提升机运行过程中,各部件之间存在大量的接触,其中主要接触参数有接触刚度系数和接触阻尼系数。
根据 M.Talia 等人[12]提出的基于 Hertz 理论和非线性弹簧阻尼模型,可以得到接触刚度系数


图4 虚拟样机模型Fig.4 Virtual prototype model
其中

式中:R1、R2为接触构件在接触点的曲率半径;E1、E2为接触构件等效弹性模量;u1、u2为接触构件的泊松比。
对于阻尼系数的设定,系数在 1~10 N·s/mm比较符合实际运行过程中钢丝绳的属性[13]。根据经验分别设置钢丝绳、卷筒及天轮之间的阻尼系数为 1 N·s/mm,罐笼与罐道之间的阻尼系数为 10 N·s/mm。
2.3 仿真算例
2.3.1 仿真参数
以中信重工的双绳缠绕式提升机试验台参数为例进行虚拟样机模型的仿真计算。该试验台的钢丝绳型号为 4V*39S+5FC,钢丝绳弹性模量Er与钢的弹性模量E的关系为

选取Er=0.5E=105 000 MPa,泊松比为 0.25。钢丝绳参数如表 3 所列,双绳缠绕提升机试验台主要参数如表 4 所列,虚拟样机模型的边界条件设置参数如表 5 所列。
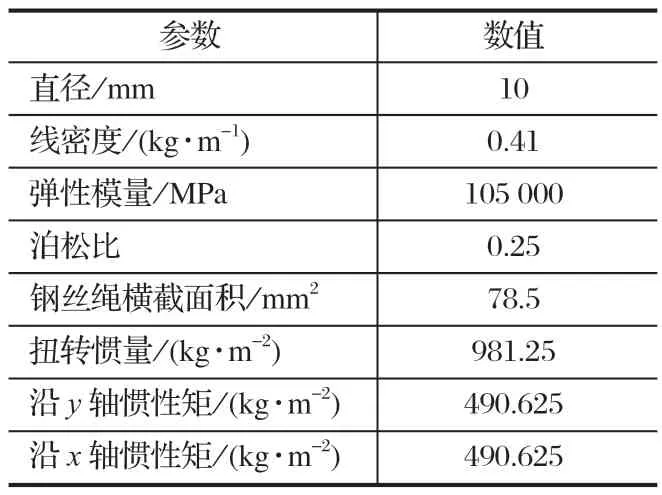
表3 钢丝绳参数Tab.3 Parameters of wire rope

表4 试验台主要参数Tab.4 Main parameters of test bench
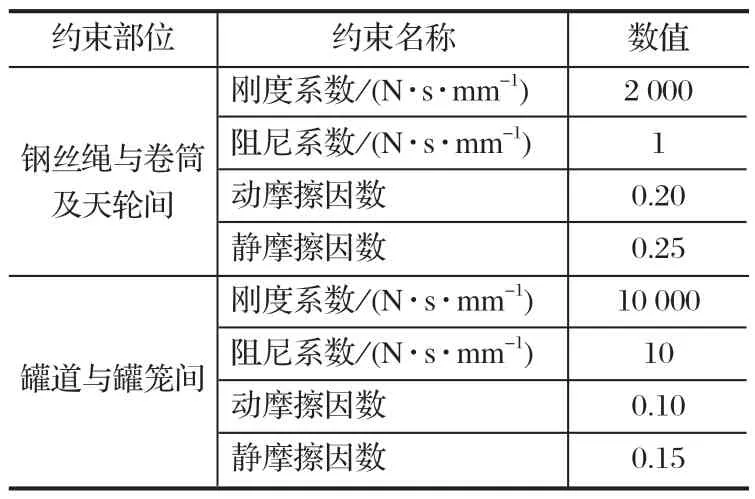
表5 系统主要接触参数Tab.5 Main contact parameters of system
2.3.2 仿真结果
双绳缠绕式提升机试验台采用了梯形速度曲线,速度变化规律如图 5 所示。
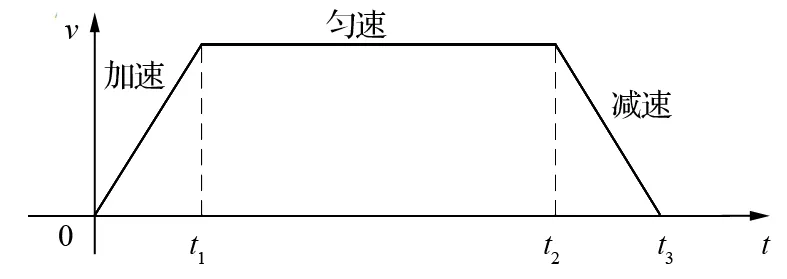
图5 提升速度变化规律Fig.5 Variation laws of hoisting speed
在虚拟样机主轴机构上添加 step 函数来编写提升机的运行速度曲线。为避免初始时段由钢丝绳自重引起的剧烈振动,先将罐笼缓慢提升至离开地面,静止到钢丝绳振动趋于平稳后再进行提升。驱动函数如表6 所列。

表6 驱动函数Tab.6 Drive function
以提升钢丝绳 1 与罐笼连接节点处的仿真结果为例,得出该节点处张力、速度、加速度、位移随时间的变化,如图 6 所示。
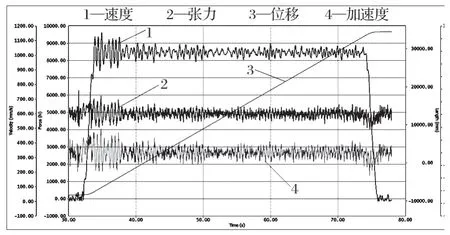
图6 虚拟样机仿真结果Fig.6 Simulation results of virtual prototype
3 试验验证
3.1 双绳缠绕式提升机试验台
多绳缠绕式提升机试验台实物图及主要工作组件如图 7 所示。

图7 双绳缠绕式提升机试验台Fig.7 Test bench for double-rope winding hoist
测量钢丝绳张力的 4 个拉压力传感器安装在钢丝绳与罐笼连接处,其他电器装置均安装在加固型机箱中。机箱通过减震装置安装于提升容器内,随提升容器上下移动,其安装位置如图 8 所示。该装置可通过无线通信模块远程控制数据采集和试验结果的数据传输,供电方式为蓄电池供电。
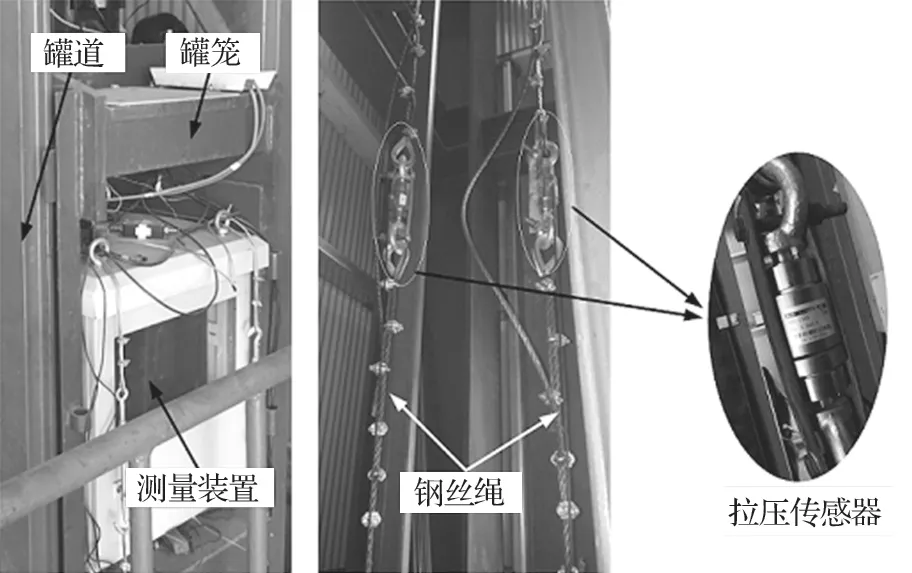
图8 钢丝绳张力测量装置Fig.8 Wire rope tension measuring device
3.2 仿真与试验结果分析
由于试验台存在制造误差,2 根提升钢丝绳存在张力差,故针对 2 根提升钢丝绳张力进行研究,仿真与试验数据如图 9 所示。仿真与试验得出的张力曲线随时间变化的趋势基本吻合,由于数据结果中包含了多个频率成分,将部分高频成分剔除,只保留张力曲线的基本变化趋势。采用低通滤波的方法对仿真和试验数据进行处理,结果如图 10 所示。

图9 提升钢丝绳张力仿真与试验结果Fig.9 Simulation and test results of tension of hoisting wire rope

图10 仿真与试验对比Fig.10 Comparison between simulation and test
由图 10 可知,提升钢丝绳张力的仿真值与试验值变化曲线具有相同的趋势,均为三段式,依次为加速、匀速和减速 3 个阶段。匀速段仿真与试验值均在9 800~10 000 N 左右,与实际提升容器质量为 1 t 的重力基本对应。该结果能在一定程度上有效反映钢丝绳张力的变化历程和范围。
由于试验环境为非理想状态,钢丝绳张力试验结果大于仿真结果。试验结果在匀速段中间部位 (提升高度为 25 m 左右)出现张力较大波动,是由于试验台罐道安装存在不平稳点 (焊接点)而受到冲击产生的波动。以上结果分析验证了仿真模型的合理性与准确性。
4 结论
(1)基于虚拟样机技术,利用多体动力学仿真软件 RecurDyn 建立双绳缠绕式提升机虚拟样机模型。建立了连续体钢丝绳模型,利用柔性体上节点的相对变形来描述柔性体的连续变形。
(2)以提升钢丝绳为研究对象,对提升钢丝绳张力进行仿真研究,得到了提升钢丝绳在加速、匀速及减速过程中的张力变化。
(3)仿真结果与试验结果的对比分析表明,张力值随时间的变化趋势基本一致,匀速段钢丝绳张力变化在合理范围内,验证了模型的可靠性与准确性。
该模型可用于对双绳缠绕式提升机钢丝绳张力变化及传递特性进行仿真分析,为进一步研究超深井提升机提供了虚拟样机模型,能够减少试验费用,缩短研发周期,具有较好的实用价值。
猜你喜欢
科技与创新(2022年13期)2022-07-14
中国特种设备安全(2022年4期)2022-07-08
客联(2022年3期)2022-05-31
电子乐园·上旬刊(2022年5期)2022-04-09
山东交通科技(2020年2期)2020-08-13
房地产导刊(2020年6期)2020-07-25
计算机与网络(2018年4期)2018-09-10
中国计算机报(2018年20期)2018-08-28
消费导刊(2016年10期)2016-12-01
中国高新技术企业(2015年13期)2015-04-30
