
水下无人潜航器集群发展现状及关键技术综述
2020-03-26 03:11:42张伟王乃新魏世琳杜雪严浙平
哈尔滨工程大学学报 2020年2期
张伟, 王乃新, 魏世琳, 杜雪, 严浙平
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
水下无人潜航器(unmanned underwater vehicle,UUV)从20世纪60年代[1]诞生以来,经历了很大的发展。从最初的遥控潜器 (remolely operated underwater vehicle,ROV) 发展到无人无缆并有一定自主性的AUV (autonomous underwater vehicle)。AUV不依赖母船提供动力、机动性强、活动范围大、作业效率高等特点[1]使其逐步成为各国研究者的主要研究对象,其各项技术得到了很好的发展,并在海洋资源勘探、侦查监视、反潜等民用和军事领域得到了很好的应用。
随着UUV技术日渐成熟,它所面临的任务的难度和复杂度也有很大提升,单一UUV已不能满足需求的发展。这就使多UUV以集群的形式互相协作执行任务成为了UUV发展的必然方向,同时也对UUV任务规划、路径规划等关键技术提出了新的要求,并促进了集群智能、编队控制等适应集群发展方向的技术的应用。
相比于单体UUV,集群有以下突出优势[2]:1) 集群系统利用单体自主性能够实现集体决策以及群体级稳态;2) 集群系统可扩展性很高,个别群内成员的增减不会对系统造成决定性影响;3)由于集群系统具有高度可扩展性和稳定性,所以集群系统鲁棒性较强;4) 集群相比于个体最突出的特点是能够完成个体无法独自完成的任务。本文将重点介绍UUV集群的发展现状和关键技术,为其将来的发展提供参考。
1 主要的UUV集群项目
1.1 军事领域
各国对UUV的研究正在向集群化的方向发展,并已被应用在军事领域。2016年英国在“Unmanned warrior” 军事演习中直观的展现了UUV集群在军事作战中的关键作用和未来潜力。
1.1.1 持续濒海水下监控网络项目 (PLUSNet)
PLUSNet (persistent littoral undersea surveillance network)[3]是由美国海军研究办公室 (ONR)赞助的一个多机构合作项目,旨在推进沿海监控技术发展,目标是探测和跟踪燃油潜艇。该项目使用固定和移动水下平台,包括具有检测系统的底部节点,具有拖曳阵列的UUVs,以及带有声学和环境传感器的水下滑翔机。节点组织成集群,与其他集群协同工作,进行大范围的行动。除检测、分类和跟踪等基础功能外,该项目还在自主性、环境适应性和网络结构3个关键技术领域取得了研究进展。
1.1.2 协作自主的分布式侦察与探测系统(CADRE)
CADRE (cooperative autonomy for distributed reconnaissance and exploration)[4]系统是协调水下无人航行器的异构集合的框架,用于自主执行面向目标的任务。该系统的开发旨在解决美国海军UUV总体规划中提出的海底搜索和调查 (undersea search and survey, USS) 以及通信与导航救援 (communications and navigation aid, C/NA) 功能, 其关键属性是可扩展性和模块化。
CADRE系统包括一个自主水下航行器网络 (AUV,也称UUV) 和自主水面航行器 (ASV),它们自主地同时进行广域海底反水雷 (MCM) 侦查,同时保持高精度导航和定位。多模式通信架构在CADRE系统中起着至关重要的作用,允许系统中的UUV彼此之间还有与各种支持平台保持联系。
CADRE系统在海底地雷对抗任务的背景下开发,因此对该系统进行了2个关键反水雷任务方案的验证:1) (365.6~914) m×20 nmile的狭长区域(如图1所示);2) 10 nmile×10 nmile的广域范围。2种方案均在保持严格的导航精度和协同定位要求的前提下进行。
1.2 民用领域
1.2.1 Cocoro自主水下航行器集群
2011年,奥地利Ganz人工生命实验室的研究人员发布了当时世界上最大的水下无人航行器集群:CoCoRo自主水下航行器集群[5]。该项目由欧盟资助,Thomas Schmickl领导,由41个UUV组成,可以协同完成任务,其主要目的是用于水下监测和搜索。该集群系统在其行为潜力方面具有可扩展性,可靠性和灵活性。研究人员通过受到行为学和心理学启发的实验来研究集体自我认知,从而允许量化集体认知。
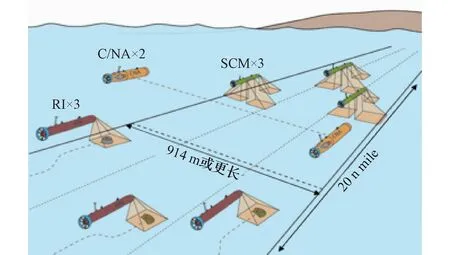
图1 CADRE系统概念图Fig.1 Concept diagram of CADRE system
1.2.2 WiMUST-用于地震勘测的AUV舰队
WiMUST[6](widely scalable mobile underwater sonar technology) 项目旨在设计和测试协作自主水下航行器系统以简化地震勘测并提供相比于现代拖缆方式的显着优势。WiMUST系统的主要新颖之处在于使用海洋机器人来捕获地震数据而不是传统的拖缆。
项目利用UUV集群牵引小型孔径短拖缆。UUV充当可重新配置的移动声学网络的感测和通信节点,并且整个系统表现为用于记录数据的分布式传感器阵列,数据通过支持船装备的声源射向海床和海底地层的强声波而获得,如图2所示。
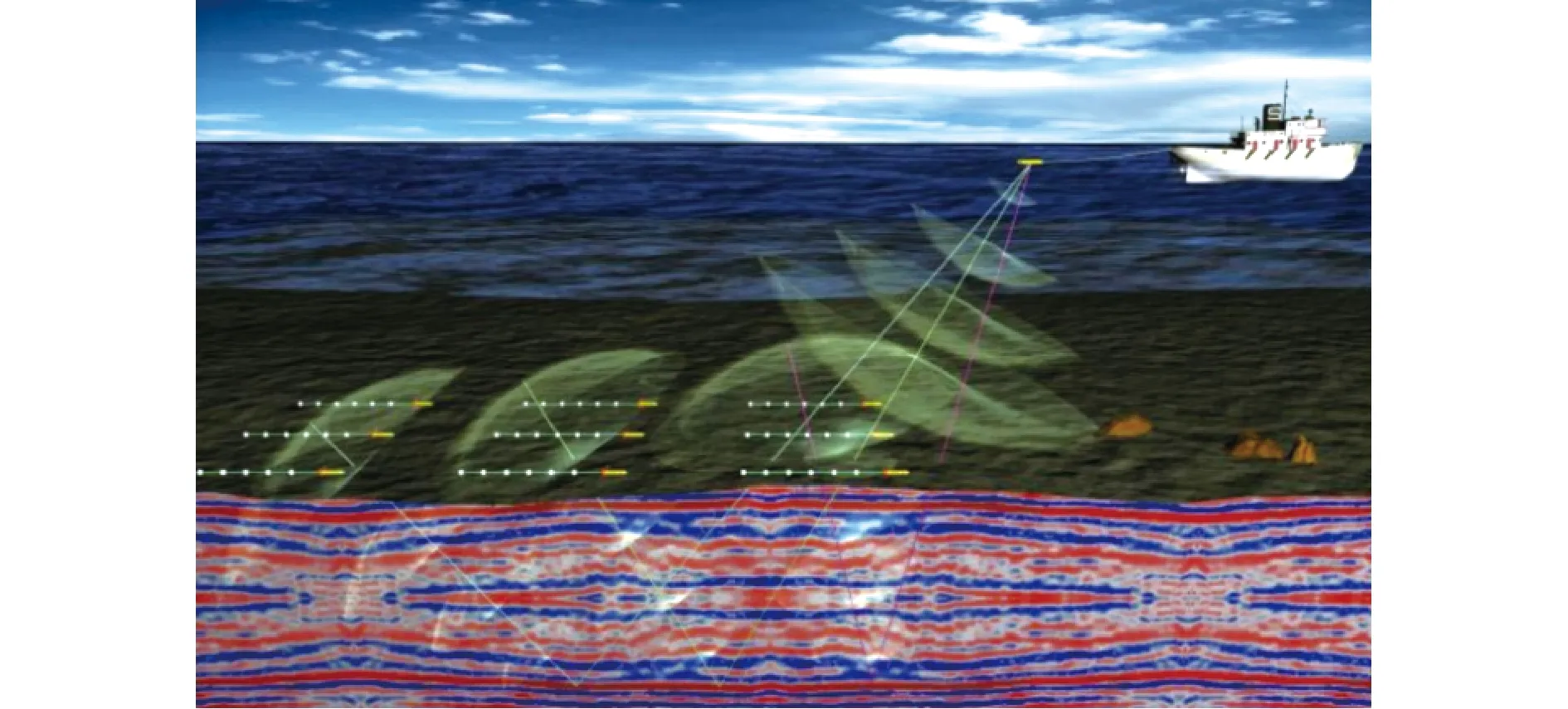
图2 WiMUST系统工作方式Fig.2 Work mode of WiMUST system
1.2.3 欧盟Grex项目
由欧盟资助的研发项目GREX[7](2006-2009)促进了多航行器协作的理论方法和实用工具的发展,缩小了概念与实践之间的差距。由该项目资助研发的技术一方面通用性很强,连接预先存在的异构系统。另一方面鲁棒性很强,能够应对由通信错误引起的问题。
2008年夏天至2009年末,该项目针对“协调路径跟踪”和“合作视线目标追踪”任务进行了3次海上试验。航行器间使用预设的时分媒体访问 (time division medium access, TDMA) 同步架构交换导航数据,允许每分钟5次交换大约20 Bytes的压缩数据包,同时避免数据包冲突。在有效通信条件下实现了编队航行 (如图3所示) 和向指定目标聚集等任务。

图3 4架航行器的编队航行轨迹Fig. 3 Formation trace of 4 UUV
除去以上项目以外,还有很多其他已经取得成功或仍在进行中的UUV集群项目:如美国海洋研究局资助的自主海洋采样网络 (autonomous ocean sampling network, AOSN)[8];美国新泽西海湾布设的大陆架观测系统 (the new jersey shelf observing system)[9];由欧洲委员会资助启动的Co3-AUV自主水下航行器的协同认知控制项目[10];由北约水下研究中心和麻省理工学院完成的通用海洋阵列技术声呐 (generic ocean array technology sonar, GOATS)[11]项目; 英国 Nekton 研究机构开发的水下多智能体平台 (underwater multi-agent platform, UMAP)[12]等项目。
通过分析以上项目实例可以发现,国外的UUV集群项目以实用性为主,从实际应用角度出发,提出所面临的问题,并通过理论结合实践的方式寻找解决办法;项目研究更侧重系统稳定性和可扩展性的研究,在此基础上去寻找实现概念设想的方法。
2 UUV集群发展关键技术
2.1 集群智能控制算法
集群智能控制算法是集群系统的核心技术,是控制各个单体活动并能将它们联系起来形成一个系统合作执行任务的关键。受自然界群体行为的启发,已有很多智能控制算法被提出,但是由于海底复杂环境和恶劣通信条件的限制,很多算法不能直接被移植到UUV集群应用当中。因此现有智能算法在海洋环境的应用以及适用UUV集群的新智能控制算法的开发仍是未来UUV集群发展的关键所在。
现阶段对集群控制算法的研究主要还是集中于对已有智能算法的改进,例如严浙平[13]在已有单、多智能体强化算法的基础上,提出一种融合了Nash—Q、CE—Q及WoLF—PHC等算法主要思想的多智能体Q学习算法,并将这种算法用于多AUV系统的控制。另外,集群控制算法的研究通常都是针对某一特殊任务或者目标,引入智能算法以达到优化控制器的目的。例如文献[14-19]分别针对UUV集群的路径跟踪、编队控制和协同围捕等问题,将适合的智能算法引入到海洋环境中,并根据不同问题所存在的不同客观条件对算法进行一定的改进。以上方法基本概括了目前主流的UUV集群智能算法研究方法:将已有智能控制算法针对海洋环境和特定任务进行改进,比较常用于集群控制的算法有:蚁群算法[20-21]、人工势场法[22]、粒子群算法[23];另外强化学习和机器学习等方法[24-27]也一直有学者对其进行集群控制应用方面的研究。UUV集群发展相对较晚,改进已有算法是一种效率较高的方法,但不应该局限于此,文献[28]提出了一种模块化、可扩展的应用于异构多UUV编队协调问题的架构。文献中对硬件扩展时的软件配合扩展升级的研究是值得参考的研究方向。海洋环境的复杂性给UUV的研究增加了很多限制和挑战,同时也为UUV研究创造了更多的可能性,在参考已有研究成果的同时应该根据具体情况和相关理论知识探索更适合的智能控制算法。
2.2 通信网络设计
远距离通信、大容量通信、高质量通信、强抗干扰性和保密性是对UUV通信系统的基本使用要求。目前UUV的主要通信方式有:光缆通信、卫星通信、无线电通信和水声通信。其中水声通信由于其衰减慢可实现远距离水下通信的特点最适用于UUV集群中成员间的相互通信。但是水声通信存在带宽有限和传输速度慢且信道不稳定等缺点,有通信延迟和数据丢包等问题。因此在特定的环境条件限制以及没有更好的通信手段的情况下,通信网络的合理设计是一种提高水下UUV集群间相互通信效率和可靠性,从而更好地协作完成任务的可行方法。
针对水声通信的各种缺点和海洋中的客观不利条件,在已有的硬件条件基础上,仍可对通信效果进行可观的改善,达到节约能耗、减少数据丢包通信延迟带来的影响等目的。主要方法有:改变通信拓扑[29-30]、设计更高效的通信协议[31]、改变通信模式[32]等。近些年比较有代表性的研究有:文献[29]针对水声信道不稳定,存在时间延迟以及海洋背景噪声的问题,提出了一种基于Markov随机过程的双层独立变换通信拓扑,通过双层独立结构和不断切换的拓扑确保编队中全部潜航器都可以实现通信覆盖,并分析了在此变换拓扑条件下潜航器编队收敛的条件;在此基础上,严浙平等[33]又提出了有效的通信拓扑权重 (communication topology effective weight)的概念以更好地表示受噪声干扰的通信信息的有效性。
2.3 任务分配
任务分配是随着集群技术发展最早被研究的技术之一,任务分配的研究对象日益复杂,分配的任务也多样化。现阶段任务分配方法根据对应集群的控制方式不同主要分为集中式分配和分布式分配2种。
1) 集中式任务分配。这种分配方式需要各UUV将自身环境信息与执行任务的代价函数信息传输给控制中心,控制中心权衡各UUV和任务情况进行合理分配。这种方式高度依赖通信,且作为控制中心的UUV计算负担重。文献[34]基于增加了延时的petri网对多UUV系统任务分配问题建模,提出了集中式和分布式相结合的任务分配方式:任务由主UUV发布,各从UUV结合自身约束条件选择是否接受任务。文献[35]在高延迟和不可靠的通信条件下,描述了一种使用k均值聚类的高效集中式任务分配机制,该机制在信息数据包错误率达到80%时仍能完成任务分配;
2) 分布式任务分配。这种分配方式并不是将决定权完全交给单体UUV,而是给各个成员一定的自主决策权力,成员可根据局部信息按某些规则进行局部任务分配,有对通信依赖小、执行速度快的特点,但由于成员不能掌握整体信息,各UUV间可能存在竞争关系。分布式任务分配比较常用的方法是合同网算法[36-38]和SOM神经网络[39-42]。合同网算法是一种谈判协调,通过模仿经济行为的“招标— 投标—中标”机制来实现任务分配,具有并行计算、分布式通信、可扩展性和鲁棒性等特点。SOM神经网络实质上是一种竞争性学习方法,相比于合同网方法,由于没有前者的协商机制,成员间的竞争会更多。这种方法适用于多UUV对应于多目标任务的情况,其核心是分别以目标任务和UUV对应SOM神经网络的输入和输出量,任务间通过竞争计算对应到不同的UUV,通过这种方式控制UUV到达指定位置完成指定任务。
任务分配的核心目的是将集群的优势最大化,通过合理分配任务给不同的执行者,使任务执行时间最少或能耗最小。集中式任务分配理论上可以通过通信协商找到最合理的分配方式,但是通信本身不可靠,且通信本身也会浪费掉一些时间和能量;与此相比分布式虽然不能得到最优解,但是它的优势是能够根据局部信息更快的作出反应。因此在应用时通常是根据实际需求将2种方法结合起来,才能发挥比较理想的效果。
2.4 路径规划
路径规划问题是指在航行器工作环境中,按照一定的评价标准(耗能最少、路线最短、时间最少等)为UUV寻找一条安全到达目标点的最优路径。将该技术拓展到集群中,对控制和算法设计提出了更高的要求。路径规划首先要考虑的是安全问题,这是UUV到达目标的前提,因此避碰(包括集群内部成员避碰和避开障碍物)是此类问题中必须考虑的问题[43-45]。其次进行规划前要先定义规划的最优标准,不同标准利用的方法也有所不同,例如文献[46]将TSP问题(travelling salesman problem)与蚁群算法结合寻找UUV集群最短路径;而文献[47]则针对存在时变洋流影响的多AUV系统,将完成任务的时间最短作为规划目的并采用动态规划算法来实现。另外在规划完成后还要对路径的可行性进行验证,避免无效路径的产生并排除可能存在的不稳定因素[48-49]。
2.5 编队控制
某些多UUV任务中,UUV以编队形式集体移动。编队控制就是一种控制一组UUV在任务需要时沿着所需路径移动的技术,同时保持所需的队形,并适应环境约束:如障碍物,有限的空间,洋流和通信约束。对空中飞行器的编队控制的研究相比于水下UUV编队要成熟,但是由于水下特殊环境的限制,空中飞行器编队控制算法不能直接移植到多UUV控制中,因此多UUV编队控制技术是集群研究的焦点之一。目前主要的编队控制方法分为以下几种:虚拟结构方法、领航者-跟随者方法和人工势场法。
1)虚拟结构方法。
为了在多个机器人之间形成和保持某种几何形状,引入了形成的刚性结构作为参考,其中机器人的整体表现像是嵌入刚性结构中的粒子,这种方法就是虚拟结构法 (virtual structure, VS)。虚拟结构按预定轨迹航行,算法反复计算UUV与虚拟结构的误差并进行调整,同时保持各UUV之间的刚性几何关系,直到UUV到达所需队形。这种编队控制方式被广泛应用于飞行器编队,但在UUV集群中的研究还很少。文献[50]提出了虚拟领航者的编队结构,由于编队领航者是虚拟的,因此它具有准确的位置信息,基于虚拟引导的准确位置,可以获得UUV在编队中的预期位置,但是只研究了2D的情况,3D的编队控制还有待研究。
2)领航者-跟随者方法。
在领航者-跟随者方法中,基本思想是领航者跟踪预定义的参考轨迹,跟随者根据预定义的方案跟踪领者航的状态。其最大优点是易于理解和实现,但是,跟随者对领航者没有明确的反馈意见,领导者的失败将导致整个编队的失败。这种方法在UUV编队控制研究中的应用比较多,在此结构前提下研究的方向主要集中在2方面:1)在复杂环境中的队形变换和避障。如文献[51-52]分别研究了在面对不同环境时采用不同的队形变换方法达到通过特定区域和避障的目的;2)编队稳定性研究。稳定性包括编队成员能否准确保持在队形指定位置和编队在复杂环境中的鲁棒性。如文献[53-54]提出了一种欠驱动多UUV主从式编队在领航UUV速度不确定时的控制方法,构建了收敛于从UUV轨迹的虚拟UUV,然后用反步法和李雅普诺夫法分析设计了跟随者的位置跟踪控制,使跟随者能准确跟随领航者。
3)人工势场法。
人工势场概念由Khatib[55]提出。这种方法的基本思想是航行器在力场中移动,其类似于由正电荷和负电荷产生的电场。要达到的位置对航行器产生吸引力,障碍产生排斥力,使得航行器可以沿着潜在场地的方向移动。这种方法通常都是与其他方法共同使用,在遇到障碍或者需要队形变换时提供辅助指向力。文献[56-57]分别将反步法和虚拟结构法与人工势场法结合实现多UUV编队控制,以达到队形保持和避障的目的。
除去以上3种常用方法,利用一致性理论对UUV进行编队控制[29,58],也是近期的研究热点。多智能体一致性是指各智能体根据预先约定的协议,使指定的状态达到一致。但是这种方法仍然很依赖通信,不能摆脱水下通信受限对编队控制的影响。而且现阶段关于一致性的研究主要局限于理论分析和仿真,还没有具体的应用实例。
2.6 导航定位
由于UUV通常需要长时间在大范围海域执行任务,而且通常UUV体积不大,所以所携带能源和质量等均受到一定的限制。这种客观条件限制以及隐蔽性和水下特殊环境等因素综合导致多UUV精确导航定位的实现是一项非常艰巨的任务。多UUV协同导航定位主要有2种方式[59]:1)每个UUV配备的导航装备相同,互相通过水声通信获得系统中其他UUV的位置信息的并行方式;2)采用少量UUV配备高精度导航设备为其他UUV提供精确相对定位信息,其他UUV利用这种相对定位信息修正自身定位误差的领航方式。并行式的结构简单,但每个UUV都装备高精度导航设备,成本将成倍增加。而领航式则兼顾了精度和成本且能够适用于不同的使用区域和环境,是当今多UUV导航定位的重点研究方向。
多UUV协同导航精度的提高主要需要从UUV内部影响因素、各UUV间的影响因素以及整个UUV协同系统等多方面进行考虑。主要涉及到以下3方面问题[60]:1)精确建立协同导航模型以及协同导航算法的开发;2)对协同导航网络中的误差因素的补偿(如通信延迟、洋流等);3)对协同导航系统中的编队构型进行优化设计。
1)建模与算法。
卡尔曼滤波是协同导航算法中最常见也最基本的方法之一,国内外学者围绕这一算法做了大量相关工作[61-65]。其中文献[62]针对EKF算法存在截断误差和计算繁琐等问题提出了使用sigma点卡尔曼滤波(SPKF)的协同定位方法; Gianluca Antonelli等则推导出了确保线性化模型的可观察性和非线性模型的局部弱可观测性的条件,然后设计扩展卡尔曼滤波器估计2个AUV之间的相对位置。协同导航算法的设计和改进都是建立在准确建模的基础上的,如文献[66]中的双伪测量的数学模型、文献[63]建立的从UUV非线性导航模型等。
2)误差补偿。
导航误差的产生有很多原因,主要包括3大类:洋流干扰、量测误差、通信时延。
针对洋流干扰问题,张立川、刘明雍等[67-68]设计协同定位滤波算法对洋流干扰进行估计;并通过非线性极小平方优化模型求解UUV和洋流的初始量,提高初始精度等方式补偿洋流影响下的UUV定位误差。
针对量测误差问题,李闻白[69]利用扩展卡尔曼滤波方法建立了单领航者导航系统的整体定位误差与相对位置量测误差间的传递方程。卢健等[70]根据水声通信的特点提出了一种相关性假设并提出了误差修正算法 (ECA),在设定条件下利用误差间的相关性抵消量测误差,从而实现量测的粗估计。
水声通信时延问题是UUV集群研究不可避免的客观不利条件,由于时延的存在,相同时间不同UUV间的相对位置无法准确获得。为了弥补这种误差可采用2种方式:补偿时延造成的定位误差和追求时间同步。对于第1种方式,最常用的方法是卡尔曼滤波,如文献[71-72]。文献[73-74]则分别基于量测伪距的EKF移动长基线时间延迟算法和建立UUV时钟相对偏移、漂移两种模型实现对时间补偿,达到时间同步。
3)编队构型。
编队构型影响着协同导航的可观测性,而可观测性直接决定协同导航定位的精度,因此对编队构型的研究也是提高协同导航精度的一种可行方法。多UUV协同导航系统具有非线性特性,使得线性系统的可观测性理论对其不再适用。为了解决这一问题国内外学者主要采用2种方式:1)将非线性系统线性化[75],但在线性化的过程中可能会导致系统关键信息的丢失;2)引入非线性的可观测性方法[76-78]。
3 结论与展望
1)一直以来限制UUV集群发展的一个主要原因是水下恶劣的通信条件。分布式优化算法能够降低通信对控制的影响,但是现阶段还没有比较成熟的分布式优化算法应用于集群当中。未来分布式优化可能会成为集群发展的突破口。
2)对UUV集群的相关研究越来越多,但是多数研究都局限于理论推导和仿真验证,受限于UUV集群验证平台的发展,相关理论和算法不能得到及时验证。
3)目前集群的研究主要针对少数UUV的编队和协作控制,针对大规模集群的研究很少,这也限制了UUV集群的发展潜力。
鉴于当今科技发展潮流,已经有学者提出将人工智能技术应用到UUV集群控制当中,可以预想这将大大提高现有航行器的自主能力,也将使集群控制更加智能化。未来集群技术的发展除了建立在前文提到的关键技术发展上之外,航行器自身的智能性的提高将是集群发展的强大助推器。
猜你喜欢
军事文摘(2023年5期)2023-03-27 08:56:26
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
军事运筹与系统工程(2019年4期)2019-09-11 06:39:58
电子制作(2018年11期)2018-08-04 03:25:40
北京航空航天大学学报(2017年3期)2017-11-23 05:14:41
中学生英语(2017年6期)2017-07-31 21:28:55
中国交通信息化(2017年3期)2017-06-08 06:09:28
青年歌声(2017年6期)2017-03-13 00:57:56
知识就是力量(2017年2期)2017-01-21 18:29:36
海军航空大学学报(2015年4期)2015-02-27 13:45:56
