智能擦拭机器人
2020-03-26 09:34:30杨承坤
科学技术创新 2020年1期
杨承坤
(西南石油大学,四川 成都610500)
1 系统概述
本设计由机械结构、控制系统两部分构成。
1.1 机械结构概述
该机器人主要由全向轮底盘、升降机构、机械擦手、机械抓手、水箱清洗机组成。

图1 整体机构三维图
1.2 控制系统概述
本系统采用32 位ARM 内核控制器和博通BCM 处理器组成一个双核的控制系统。采用全向轮底盘作为承重和移动机构;采用激光雷达构建室内地图;超宽带定位技术用以确定机器人在室内的位置;采用超声波收发模块实现实时避障;采用双目视觉实现目标物体识别及定位;采用6 自由度机械手作为执行机构,实现物体的抓取和桌面的擦拭。
2 机械结构设计
2.1 底盘
机器人采用带有全向轮的底盘,底盘上包括MD60 行星减速电机、轴承电机支座、全向轮、铝型材等。
2.2 升降机构
机器人的升降机构由铝型材、滑轨、滑块、同步带、同步带轮、步进电机、支撑板等组成。铝型材作为升降机构的支架,在机器人前方的铝型材支架两侧安装滑轨,支撑板左右两(转下页)侧与滑块进行连接,其后侧与同步带进行连接。通过控制步进电机转动,同步带带动支撑板上升或下降。

图2

图3 目标物体的定位及抓取流程图
2.3 机械擦手与抓手
采用6 自由度的机械擦手和机械抓手,实现不同平面的擦拭与不同物体的抓取。机械擦手由舵机、连接杆、擦拭头、喷水装置组成。使用时机械擦手会自动识别擦拭平面,先对待擦拭的平面进行喷水处理,然后进行擦拭,最后再进行清洗擦拭。机械抓手由舵机、连接杆、抓手组成。使用时通过控制机械抓手自动定位待抓物品并移动到其位置处,实现抓取。
3 控制系统设计(图2)
3.1 底盘控制
底盘内置速度位置PID 控制器、MD60 行星减速电机、500线光电编码器。控制器输出PWM脉冲信号对电机进行控制并接收编码器脉冲以实时改变底盘的运动速度和方向。
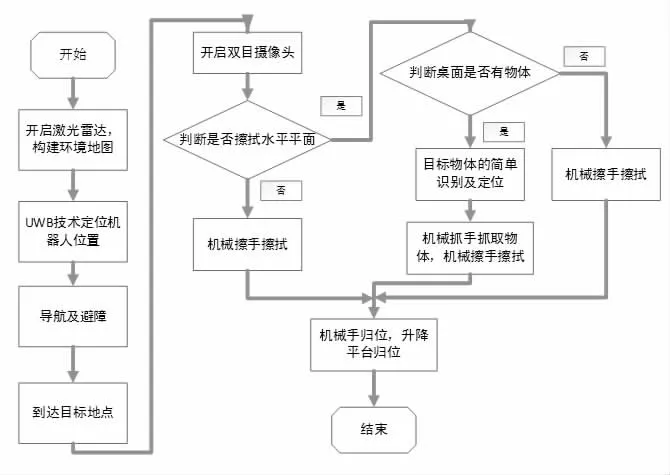
图4 控制系统软件实现流程图
3.2 室内导航与避障
此方法首先使用EAILIDAR 激光雷达扫描室内环境,用采集到的数据拟合出室内环境轮廓图[1];其次利用DW1000 超宽带芯片实现超宽带技术确定机器人的室内位置[2];然后主控处理器结合目的地信息、室内环境信息和机器人位置信息,规划出机器人的行进路线;最后结合超声波测距模块进行防碰撞检测和路线偏差修正,以实现实时导航和避障的功能。
3.3 目标物体的定位及抓取
使用双目摄像头采集信息,实现对目标物体的识别及定位,根据获得的距离信息和方向信息指引小车移动到特定物体的正前方,并对机械抓手进行控制,实现抓取。
3.4 控制流程图(图3、4)
4 结论
本设计实现的智能擦拭机器人可自动擦拭桌面、橱窗等水平或垂直平面,能自动识别并抓取物品,且整体机构简明、实现容易、成本造价相对较低,拥有良好的市场前景与改进空间。
猜你喜欢
粮食加工(2022年6期)2022-12-02 09:07:56
高技术通讯(2021年7期)2021-08-30 08:36:52
长春大学学报(2021年4期)2021-05-17 08:38:56
现代信息科技(2021年21期)2021-05-07 02:54:12
家庭影院技术(2020年8期)2020-09-11 06:45:22
福建质量管理(2019年18期)2019-10-14 03:56:20
制造技术与机床(2018年8期)2018-10-09 08:27:20
制造技术与机床(2017年3期)2017-06-23 08:11:32
制造技术与机床(2017年2期)2017-05-04 04:17:36
制造技术与机床(2017年12期)2017-02-02 07:05:07