
基于视频检测技术的自适应信号灯配时算法
2020-03-20 04:54吴大伟
山西建筑 2020年5期
吴 大 伟
(东北林业大学交通学院,黑龙江 哈尔滨 150040)
1 概述
近年来,随着经济的不断增长,城市化、汽车化的急速发展,交通拥挤、交通肇事、环境污染等问题日益严重。城市交通信号控制的目标在于改善交通流的质量,并通过对道路上的车辆在交叉口处进行调节、警告和诱导以提高运营效率[1]。
近年来,很多学者均在智能交通信号控制系统及相关算法提出了创新与改进,其中以计算机技术和通信技术为辅助手段的自适应控制为主[2],通过检测器将检测的交通流数据实时通过网络传到上位机[3],上位机可以对多个路口信号机进行协调,从而提高整个区域或干线上的运行效率。朱旭东提出一种基于北斗定位系统的智能控制交通信号灯的算法,通过对车流量监测获取相关控制参数,实现对信号灯的智能控制,实验结果表明该算法可实现自动调整各相位上周期时长,保证城市交通顺畅[4]。晏勇提出一种与智能硬件相结合的自适应交通信号灯控制系统,该系统基于无线传感器网络控制节点组建WSN,接收信号强度指示测距算法测试交通灯与等待车辆排行距离,并根据经卡尔曼滤波降噪处理后交通信号灯自动调整排行距离以及指示通行的时间[5]。袁丽丽针对两相单交叉路口信号灯的放行时间等控制规律,以及交叉路口的现有硬件设施等条件,一种新的交通信号配时优化方法被提出。通过获取交叉路口实时的交通流信息,提取南北方向与东西方向车辆排队长度,实现信号灯的自适应实时控制[6]。李金洋等人提出了一种基于车速的自适应交通信号灯控制系统。系统采用车联网通讯模式,利用相关通讯协议,在汽车通过路口时将车速信息发送给该路口的交通信号灯,系统通过分析交叉口前方车速信息和交通信号灯当前状态,进而对红绿灯的显示进行控制,实现红绿灯的实时自适应调整[7]。
本文提出一种基于视频检测技术的自适应信号灯配时算法,首先利用光流场法对视频中进入交叉口的车辆进行识别,并统计交叉路口每个进口各车道中在一个初始信号周期内的车辆数、车辆行驶速度以及加速度,根据视频检测数据重新计算信号周期及支路绿灯时间等信号配时参数,并计算最小绿灯时间,最终根据最小绿灯时间和支路绿灯时间选择新的信号周期。
2 自适应信号灯配时算法
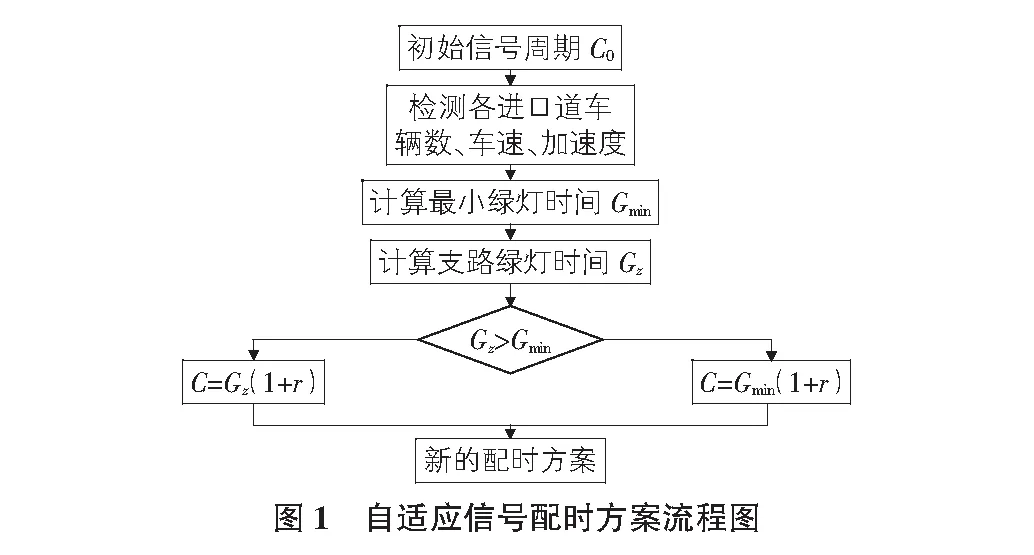
自适应信号灯配时算法流程如图1所示。设交叉路口每个进口各车道中在一个初始信号周期C0内的车辆数分别为Ni(i=1,2,3,4),车辆平均行驶速度为v(t),车辆平均加速度为a(t),各支路与主路流量比的最小值为k,则:
(1)
设配时参数为r,其具体表达式为:
(2)
重新计算信号周期及支路绿灯时间等信号配时参数,设进口车道内的车辆加速时间为Tj,延迟时间为E,则:
(3)
(4)
加速距离L可表示为:
(5)
匀速通过交叉口时间F为:
(6)
其中,l为主路交叉口宽度。
加速时间M为:
(7)
则支路绿灯时间Gz为:
Gz=E+F+M
(8)
最小绿灯时间Gmin为:
(9)
其中,vr为行人过街步行速度。
最终确定新的信号周期C为:
(10)
3 基于光流法的车辆检测
基于视频图像处理技术的车辆检测器同传统的车辆检测器相比,具有安装维护成本较低、范围广、运算速度快等诸多优点[8],因而近年来在智能交通系统中得到了大量的应用,针对通过道路摄像头拍摄的交通序列图像,研究人员提出了很多视频图像处理及分析技术,每种技术均有其优点与缺点[9]。为实现对交叉口车流量数据的精确统计,本文采用光流场法进行交叉口车流量的检测。
光流场法的基本思想是首先建立整幅图像的光流场,通过光流场计算图像中每一个像素点的运动向量,从而检测出运动目标[10]。光流法的基本方程如下:
I(x,y,z,t)=I(x+δx,y+δy,z+δz,t+δt)
(11)
其中,I(x,y,z,t)为在位置(x,y,z)的体素。
设物体在极短时间内位移足够小,则根据图像约束方程的泰勒公式可得:

(12)
其中,∂I/∂x,∂I/∂y,∂I/∂z和∂I/∂t分别为图像在(x,y,z,t)这一点向相应方向的差分。
结合式(11)可以得到:
(13)
进而可以得到:
(14)
其中,Vx,Vy,Vz分别为I(x,y,z,t)的光流向量中x,y,z的组成。
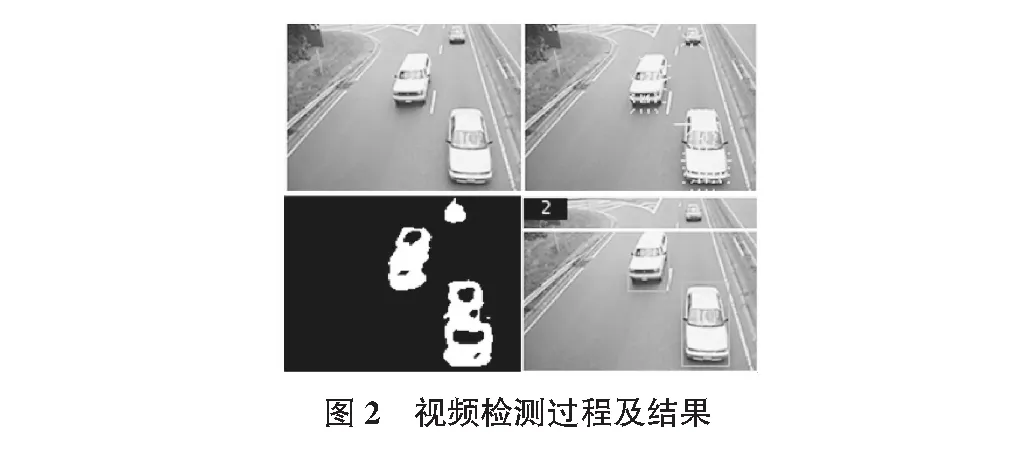
最终采用Lucas-Kanade算法对光流(Vx,Vy,Vz)在一个大小为m×m×m(m>1)的小窗中的相关常数进行求解[11]。视频检测过程及结果如图2所示。
4 仿真分析
基于vissim软件对本文算法进行仿真分析,仿真前对交叉口的相关参数进行设置,其西进口为三车道,出口为两车道;东进口为三车道,出口为两车道;南北均为双向两车道,其中,东西向为主干道,南北向为支路,车流量相差较大。仿真时首先预设随机车流量,主路与支路的流量基数依照实际调查数据设置。当主路与支路的流量比为5∶1时,仿真结果表明,西进口延误下降37.4%,东进口延误下降72.3%。西东直行平均排队队长缩短了16 m,西东直行最大排队队长缩短了16 m,东西直行平均排队队长减少15 m,东西直行最大排队队长缩短了220 m。西进口行程时间减少了11 s,东进口行程时间减少了71.9 s。西进口通行车辆数增加了4辆,东进口通行车辆数增加了31辆。当主路与支路的流量比为2∶1时,仿真结果表明,西进口延误降低8%,东进口延误降低7%。西东直行平均排队队长减少4 m,西东直行最大排队队长缩短了10 m,东西直行平均排队队长减少19 m,东西直行最大排队队长缩短了54 m。西进口行程时间减少了2.1 s,东进口行程时间减少了6.3 s。西进口通行车辆数减少了5辆,东进口通行车辆数增加了9辆。
5 结语
本文提出一种基于视频检测技术的自适应信号灯配时算法,首先利用光流场法对视频中进入交叉口的车辆进行识别,并统计交叉路口每个进口各车道中在一个初始信号周期内的车辆数、车辆行驶速度以及加速度,根据视频检测数据重新计算信号周期及支路绿灯时间等信号配时参数,并计算最小绿灯时间,最终根据最小绿灯时间和支路绿灯时间选择新的信号周期。基于vissim软件对本文算法进行仿真分析,仿真前对交叉口的相关参数进行设置,其西进口为三车道,出口为两车道;东进口为三车道,出口为两车道;南北均为双向两车道,其中,东西向为主干道,南北向为支路,车流量相差较大。仿真时首先预设随机车流量,主路与支路的流量基数依照实际调查数据设置。仿真结果显示,该方法可根据交叉口主、支路流量比,输出合适的信号配时指令,进行交通灯控制,从而达到优化交通状况,使交叉口信号控制更为协调,合理安排道路资源,提高通行效率,环型交叉口的拥挤状况和主、支道路空间资源分配问题,进而解决汽车燃油节省、车耗和空气污染的一系列问题。
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
建材发展导向(2022年14期)2022-08-19
建材发展导向(2021年19期)2021-12-06
天津建设科技(2020年2期)2020-05-13
小天使·一年级语数英综合(2018年6期)2018-06-22
电机与控制学报(2018年9期)2018-05-14
科技与创新(2017年7期)2017-05-13
汽车维修技师(2016年11期)2016-05-05
华人时刊(2016年19期)2016-04-05
安徽冶金科技职业学院学报(2015年3期)2015-12-02
