
基于人机工程的驾驶性开发研究
2020-03-19 17:05:18张鹏飞杨雪峰林万国刘甲一
汽车电器 2020年1期
张鹏飞,杨雪峰,林万国,王 凯,刘甲一
(一汽轿车股份有限公司产品部,吉林 长春 130012)
驾驶性是包含平顺性在内的加速性,是衡量汽车动力总成系统标定开发好坏的一类重要指标,与汽车的动力性、经济性、舒适性都有密切的关系,是汽车内在品质的重要体现[1]。
随着人民生活水平的不断提高,用户对汽车安全性、舒适性的要求也越来越高。驾驶性作为能够被用户直观体验的一项性能,对用户体验的贡献也越来越大。驾驶性体现着汽车产品市场定位与品牌基因,影响着消费者购买意愿,是提升产品竞争力的关键[2]。
另一方面第4阶段燃油消耗量法规规定2020年生产的乘用车平均燃料消耗量降至5.0L/100km[3]。面对油耗法规要求,节能也是当代汽车开发的主旋律,所以开发出既能满足用户驾驶性需求又能满足油耗、排放法规要求的车辆是各大主机厂必须攻克的难题。
1 驾驶性开发概述
驾驶性开发主要是研究车辆在X方向 (车辆前进/后退方向)上的运动情况。对于不同类型的车,用户所需求的动力表现并不一致,例如商务车的主要需求是舒适性,SUV的主要需求是动力性。另外同一种类型的车为了表现不同的加速特性也可能需求不同的动力表现,我们称这种不同的动力表现为整车加速风格。
根据汽车行驶方程式 (1)

在驾驶性开发过程中一般不考虑坡度因素,所以方程式(1)可以转化为方程式 (2)。

式中:Ttq——发动机扭矩;ig——变速器传动比;i0——主减速器传动比;r——车轮半径;G——作用于车辆的重力;f——滚动阻力系数;CD——空气阻力系数;A——迎风面积;ua——车辆行驶速度;m——车辆质量;δ——旋转质量换算系数[4]。一般工程应用中可以使用滑行阻力替代风阻和摩擦阻力。不难看出车辆作为一个很复杂的弹性系统,当内部或者外部参数发生变化时,在短时间内可能导致整个系统产生不规则运动或振荡等反应,直至达到某种新的平衡。我们将这种从一个稳态工况到另一个稳态工况的过程称之为过渡工况。
根据过渡工况的力学性能,在工程实践中车辆可能表现出加速冲击、加速迟滞、加速喘振、加速倒拌/加速应答差、爆震、减速冲击、减速喘振、后燃、减速作用过强或过弱、进入或退出减速断油过程有冲击等现象中的一种或者多种,我们将这些现象统称为过渡工况驾驶性问题。
简言之,驾驶性开发的主要内容有两点:一是确定整车加速风格;二是优化动态扭矩管理,避免出现过渡工况驾驶性问题。两者之间有着相辅相成的关系,整车加速风格是动态扭矩管理控制的基础;动态扭矩管理控制是加速风格实现的必要保障。在整车标定过程中,加速风格标定就是驾驶员需求扭矩标定,动态扭矩管理标定解决了过渡工况各种扭矩滤波的问题。
1.1 驾驶员需求扭矩
现代发动机控制均采用基于扭矩的控制策略,其核心算法之间全部使用扭矩进行计算和传递,如图1所示[5]。电控系统通过加速踏板位置传感器反馈的电压值感知驾驶员对加速踏板的操作情况,实时计算驾驶员需求扭矩。系统综合考虑驾驶员需求扭矩、发动机燃烧模型计算的实时扭矩以及其它扭矩需求,计算出下一时刻的燃烧扭矩需求,再通过内部算法计算出发动机喷油、点火、进气等执行器的控制参数,实现扭矩输出。同时系统通过回采执行器执行情况和传感器信息精确计算发动机各位置的实际输出扭矩,用于内部修正并通过总线发送给其他控制器。
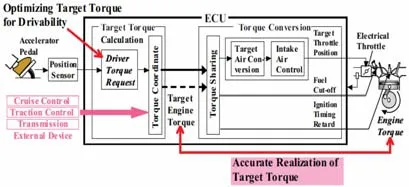
图1 基于扭矩的发动机控制策略
1.2 动态扭矩管理
根据驾驶员需求扭矩的更新策略,当加速踏板位置发生变化时,系统会实时计算当前工况下的目标扭矩。如何按照既定目标从当前实际扭矩达到目标扭矩的控制就是动态扭矩控制。动态扭矩控制的核心标定量是单位时间内扭矩增量和控制时间周期。如图2所示,车辆行驶过程可以被抽象为怠速、加速、匀速、减速4个过程,每个过程又可细分为很多工况,这里不做详细介绍。在实际工程应用中,每一个时刻的当前实际扭矩与目标扭矩的相对关系基本都不一致,一般系统采用变参数PID控制方式达成最终目标,因此该部分是驾驶性标定的难点也是重点。

图2 目标扭矩与实际扭矩之间的关系
2 驾驶性与人机工程
在驾驶员-汽车-环境闭环控制系统中,驾驶员同时承担着操纵车辆以及根据车辆动态响应来控制车辆的任务。如图3所示[6],驾驶性反映了驾驶员在汽车纵向行驶过程中人车交互作用下的综合感知,描述了在整个汽车纵向行驶闭环控制系统中驾驶员动态感觉 (纵向加速度、冲击、俯仰等)、决策行为 (根据感觉做出判断)、操作行为 (换挡、踏板操作等)、车辆动态响应过程之间的交互关系,并以驾驶员的期望满意度为最终评价依据[2]。

图3 驾驶员-汽车-环境闭环控制系统
将整个过程拆解分析,驾驶员在操作加速踏板之前,已经对踏板行程和加速效果产生了一定的心理预期,并按照心理预期对踏板进行操作。同时驾驶员通过感觉 (听觉、视觉、触觉等)接收外界关于加速效果的反馈信息,并通过心理预期和实际反馈的对比,进行综合判断并给出当前车辆的加速效果判定,如图4所示。解析这一过程,可得出基于人机工程的驾驶性开发核心是达到并超越驾驶员的心理预期,所以如何正确解析驾驶员对加速踏板的操作与心理预期的对应关系,就是驾驶性开发的关键。
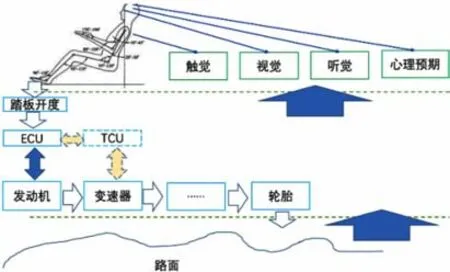
图4 整车加速示意图
在驾驶员-汽车-环境闭环控制系统中,唯一的人机交互介质就是加速踏板。电控系统通过采集加速踏板的位置信号,如图5所示,并通过运算转化为踏板开度百分比。系统结合当前转速、车速、踏板开度等信息,转化为驾驶员需求扭矩,驾驶员需求扭矩就是用来解析驾驶员对加速预期对应的扭矩值。驾驶员需求扭矩通过系统内部算法转化为输出扭矩,再通过进气、喷油、点火等转化为最终的输出扭矩和轮边扭矩,最终达成整车加速目标。

图5 加速踏板电-位移特性
3 基于人机工程的驾驶性开发
3.1 驾驶性开发流程
驾驶性开发流程如图6所示,动力总成选型一般在前期车型规划时已经确定。动力总成选型结束后整车最大加速特性已经固化;人机工程解析是解析驾驶员心理预期的重要手段,为整车加速风格设定提供必要的人机工程依据;加速风格设定是驾驶性开发的核心目标,是确定驾驶员需求扭矩标定的方向,整车标定工程师会根据车型定位、用户需求以及车型特点选择不同的加速风格;动态扭矩标定、换挡品质标定都是为了更好地实现驾驶员需求扭矩;最终的主/客观评价的目的是为了验收开发结果,一般都穿插在开发过程中进行。其中虚线部分的换挡规律标定和换挡品质标定仅适用于自动挡车型。

图6 驾驶性开发流程简图
3.2 人机工程解析
人机工程数据分析的目的是为了获取驾驶员脚踝舒适区对应的踏板区域和常用的踏板工作区。由于不同车型人机工程设计的驾驶员脚踝位置与加速踏板的相对位置不同,所以需要做具体车型具体分析。如图7所示,通过人体脚踝位置角度变化可以计算出加速踏板角度变化,由此可以计算出整个车型的踏板变化位置和人体舒适区踏板位置。
由于多数车型设计时只考虑标准身高和标准比例,并不能完全覆盖各类体型和身高差异问题,所以通过计算得到的人机数据并不符合实际工程应用要求,因此需要一种方法能够提高用户覆盖度。为了解决这一问题,经过研究证实,可以使用实车或者利用人机工程实验室资源,测定驾驶员操作踏板的实际数据,并通过统计学方法进行数据分析。
为了保证测试数据的真实有效,需采用特殊方法让被测人员在轻松的状态下自然流露其操作车辆的习惯。经研究发现,按照如下简单方法,在人机工程试验台 (或试验车辆)上进行试验,可以得到较为准确的数据。

图7 人机工程示意图
1)测试人员调整座椅至舒适坐姿。
2)操作加速踏板调整脚踝至最舒适位置。
3)等待1min后,开始采集数据。
4)持续采集3min加速踏板位置信号。
5)将收集到的数据进行数据处理。
在某测试车型上,经过对400人次数据采集,收集到的数据如图8所示。分析数据可知,被测用户使用踏板的舒适区域基本落在10%~30%之间。另外大部分男性客户首次操作加速踏板的开度在28%附近,大部分女性客户首次操作加速踏板开度在15%附近。
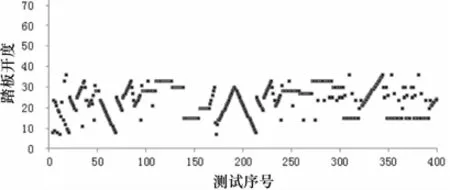
图8 加速踏板位置使用频率数据
将得到的驾驶员舒适位置区间数据和踏板使用频度数据[2]按照一定规律分配到整车踏板行程上。如图9所示为某车型设定参数,横坐标为踏板开度,纵坐标为输出扭矩系数,不同的车型根据其阻力情况确定不同的输出扭矩系数。
3.3 整车加速风格设定
整车加速风格设定就是如何将整车的加速度特性或功率特性分配到加速踏板的行程上。一方面不同排量车型的最大加速能力不同。另一方面不同用户对加速变化的感知基本一致,不同车辆必须满足驾驶员最小加速度感知要求,从而满足驾驶员加速需求。由于受驾驶员对不同加速度值的感知程度不同,部分小排量车型为了追求车辆低速性能,特意提升小踏板开度下的扭矩输出值,以保证和大排量车量车型达到基本一致的低速性能,如图10所示,A-2-修为某小排量车型加速目标,该车型在提升前段加速性能的同时也牺牲了中后段加速性能。

图9 等速踏板开度分配
整车加速风格设定过程中需要结合人机工程数据分析结果、该车型的定位情况、整车加速度工程目标及其他区域踏板使用情况,最终完成全区域的整车加速风格设定,如图11所示为某小排量车型加速风格总体目标。
3.4 驾驶员需求扭矩标定
驾驶员需求扭矩作为表征驾驶员加速意图的主要指标,对于车辆动力性表现的影响至关重要。驾驶员需求扭矩标定时,需要在满足整车加速风格工程目标的前提下,兼顾转速稳定特性、车速稳定特性、加速线性特性、滑行特性、NVH特性等整车其他整车性能。根据具体需求对标定数据进行调整,经过标定数据修正、客观数据测试、主观评价等环节评价合格后,才能具备数据发放条件。
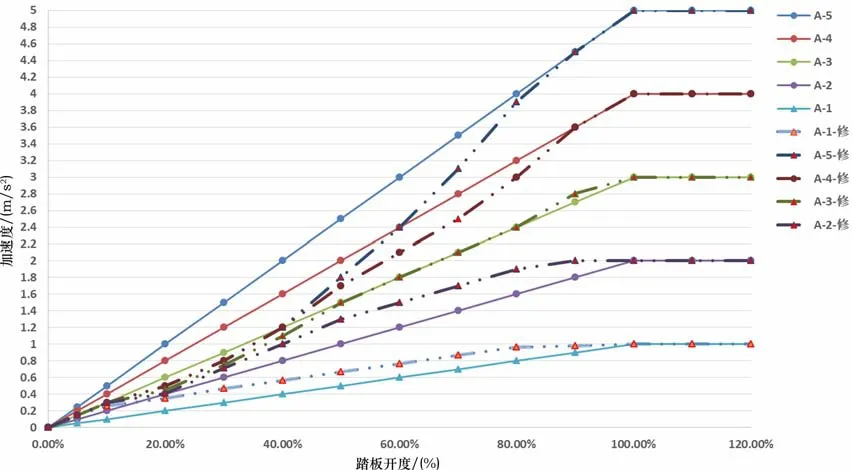
图10 加速风格设定数据

图11 特征区域加速风格定义实例
在实际工程应用中,首先按照加速风格定义和人机工程测算结果计算出驾驶员需求扭矩,并按照等功率原则完成整个驾驶员需求扭矩的桌面标定工作。之后在实车上进行标定优化工作,并完成驾驶员需求扭矩的标定工作。如图12所示为某车型驾驶员需求扭矩最终标定结果。
3.5 动态扭矩管理标定
车辆行驶过程可以抽象为怠速、加速、匀速及减速四个工况。怠速和匀速基本处于稳态工况,相对难度较低,加速和减速工况是驾驶性标定的难点也是重点。
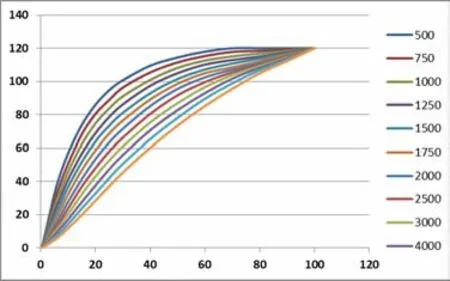
图12 驾驶员需求扭矩标定结果
如图13所示,整车是一个复杂的弹性系统,由于传动链间隙和弹性元件的存在,使得整个系统的性态比较复杂。为了精确控制扭矩输出,电控系统根据传动链的状态信息将加速和减速过程分割为很多不同的子工况,每一种工况下使用不同的策略和算法进行控制。通常将加速过程分为2段,减速过程分为3段,如图14所示为某车型驾驶性测试数据。宏观上看,动态扭矩管理就是对目标扭矩的实现过程进行滤波控制,目的是使实际扭矩的输出更加平稳有序并且不发生过渡工况驾驶性问题。实际工程应用中在每一个阶段都会有车速、转速、踏板开度、挡位等变量参与运算,用于计算不同工况下目标扭矩的修正系数。
另外,由于驾驶性标定数据对车辆状态的依赖性很高,同一车型在开发过程中不同阶段的车辆,其数据继承性相对较差,所以每个阶段的车辆都需要进行标定验证。

图13 扭矩传递简图
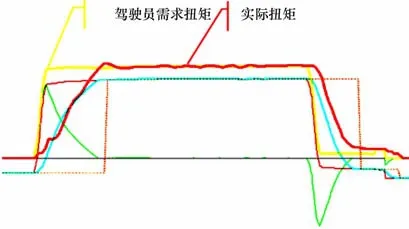
图14 驾驶性测试数据
3.6 驾驶性客观测试
驾驶性标定结束后需要进行驾驶性客观测试并判断是否满足整车加速工程目标。采用GPS设备对车辆加速性能进行测试,如图15所示为该车型M2挡加速性能测试结果,图中自上而下分别为80%、50%、20%踏板开度下的加速特性曲线。线性处理后其加速度分别为2.41m/s2、1.94m/s2、1.03m/s2,客观测试结果可以判断该车型驾驶员需求扭矩标定全部满足整车加速风格设定要求。
由于排放、油耗、驾驶性三者之间客观测试除了要针对驾驶性进行客观测试以外,还需进行油耗排放验证。如表1所示为某车型排放和油耗验证结果。分析数据可知,污染物排放水平均达成五阶段排放[7]要求并满足一次实验通过的要求,同时油耗实验结果满足整车油耗工程目标。
3.7 驾驶性主观评价
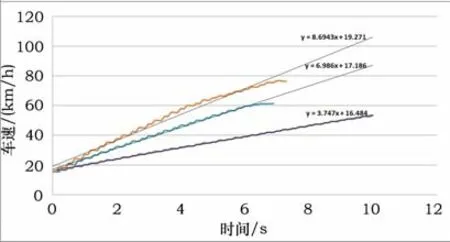
图15 M2挡加速性能测试结果
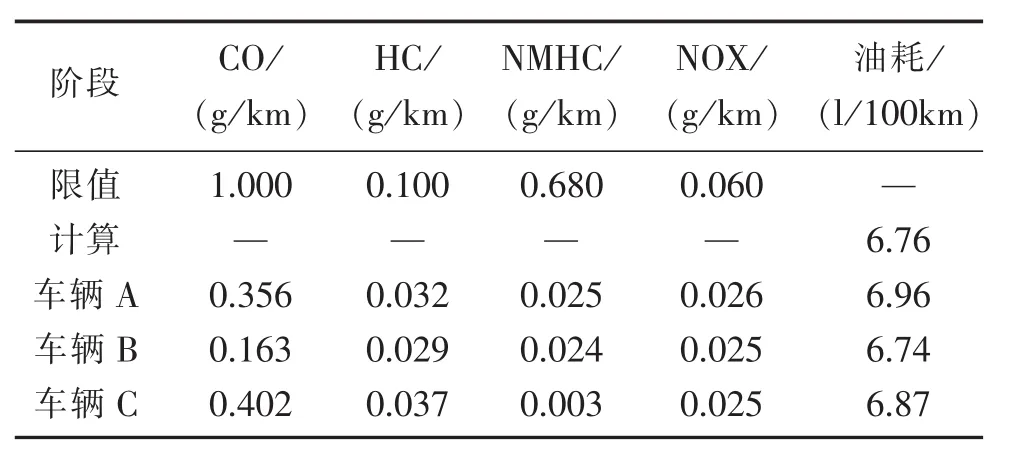
表1 排放油耗验证结果
驾驶性主观评价是验证驾驶性开发是否满足用户需求的最终判定方式,目前世界各大汽车公司都构建有企业内部的、适合自身车型风格的驾驶性主观评价体系,并有一批拥有丰富评价经验并对自身产品驾驶性特征充分了解的工程师队伍来保证其汽车产品的驾驶性评价与开发[8],表2为某车型部分指标的评价结果和参考值,由表中可以看出,该车型采用基于人机工程的标定方法,一次性达成主观评价目标,并超越预期。
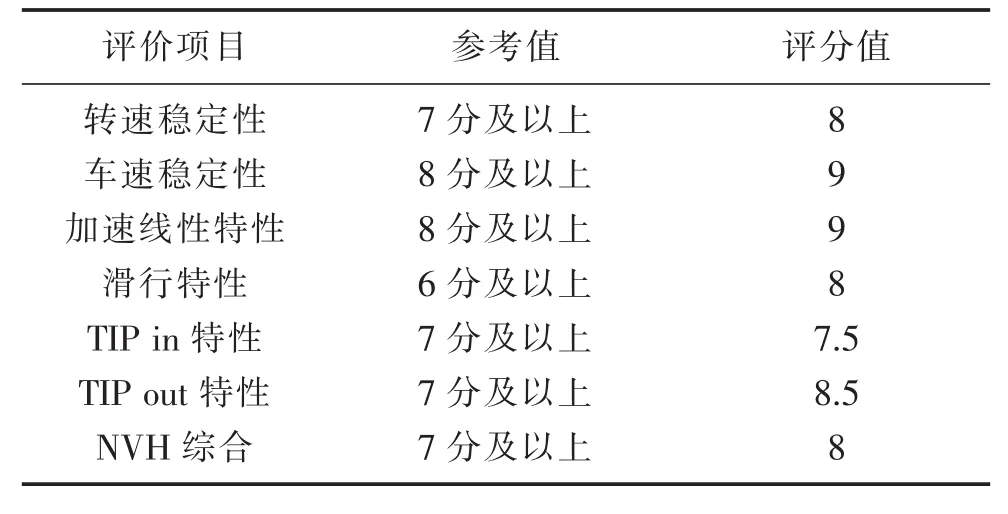
表2 驾驶性主观评价结果统计
4 结语
传统驾驶性开发全凭工程师经验完成,并没有可以继承和传承的方案,本文采用基于人机工程的标定方法后让经验数据有章可循,采用大数据的分析方法,更加准确地了解用户的真实意图,更有效地满足驾驶员对车辆加速的预期。采用新的标定方法由于目的性更强,方法更有效,节省了大量的开发周期。
猜你喜欢
车主之友(2022年6期)2023-01-30 07:58:16
汽车实用技术(2022年15期)2022-08-19 02:48:08
科学与财富(2021年33期)2021-05-10 16:54:38
北京汽车(2021年2期)2021-05-07 03:56:26
电站辅机(2021年4期)2021-03-29 01:16:52
黄河之声(2019年23期)2019-12-17 19:08:43
汽车实用技术(2019年17期)2019-09-21 03:46:32
黄河之声(2017年13期)2017-01-28 13:30:17
噪声与振动控制(2015年4期)2015-01-01 07:08:09
客车技术与研究(2014年1期)2014-03-20 14:34:48
