基于龙伯格观测器的永磁同步电机仿真与实现
2020-03-18 09:42朱文龙马西沛
智能计算机与应用 2020年10期
朱文龙, 马西沛, 何 郑
(上海工程技术大学 机械与汽车工程学院, 上海 201620)
0 引 言
永磁同步电机(PMSM)具有可靠性高、功率密度高、效率高等显著优点,因此被广泛应用于家用电器、航空航天、轨道车辆等领域。在永磁同步电机控制当中,矢量控制法的研究最广泛、应用最成熟。矢量控制法需要获取转子的位置和速度信息,而目前通常采用位置传感器的方式来获取目标转子的位置等信息。虽然位置传感器控制方法具有维护方便、程序设计简单等优点[1-2];但位置传感器的使用,不仅增加了电机设计和制造成本,而且降低了控制系统的可靠性,限制了其在复杂环境条件下的应用潜力。例如,汽车发动机舱等高温环境中。在无位置传感器控制方案中,磁链法通过定子磁链的变化,计算得来转子位置信息[3],
该算法原理浅显易懂并且利于实现,其不足在于低转速时的不稳定性;扩展卡尔曼滤波器法是把传统的卡尔曼滤波器法优化改进,虽然该方法有很强的适用性,但方法过于依赖系统参数和模型的准确度,并且对硬件的计算能力有较高要求[4-5]。滑模观测器是一种基于滑模变结构的非线性控制方法[6],该方法对系统参数的变化不敏感,并且具有鲁棒性好、观测精度高等优点。但其具有抖振现象严重的缺点,直接原因是严重的转矩脉动[7-8]。相对于上述几种传统的控制方法,龙伯格观测器法结构简易,具有良好的误差闭环纠正能力,其控制精度较好,性能表现优异,在工业控制、汽车等工程中被广泛应用。
综上所述,基于上述各种无位置传感器控制方法的优缺点,本文将在研究永磁同步电机的数学模型和空间矢量脉宽调制技术的基础上,对基于龙伯格观测器的永磁同步电机矢量控制系统进行建模仿真研究,并基于此方法设计永磁同步电机的控制器,验证龙伯格观测器在永磁同步电机无位置传感器控制上的优异性能,为今后算法的研究和改进提供理论和仿真基础。
1 龙伯格观测器
1.1 永磁同步电机龙伯格观测器构建
已知在两相静止坐标系中,永磁同步电机的状态空间表达式为:
(1)
为了构建龙伯格观测器,本文建立了一个初始条件相同的新系统(矩阵A、B和C也相同)。为了减少估算系统的误差,设计负反馈环节提高感测器精度,最后需要满足观测器存在的条件,构建PMSM的龙伯格观测器的整体结构。构建的永磁同步电机观测器结构如图1所示。

图1 永磁同步电机状态观测器结构图
因此,永磁同步电机龙伯格观测器的模型可由式(2)表示:
(2)

1.2 数字锁相环设计
(3)
在用微分的方法计算转速信息时,反电动势中的异常值对计算结果干扰很大,采用数字锁相环的方法来计算。针对反电动势估算信号,先对该信号进行滤波处理,把信号中的杂波滤除,然后滤波信号进入锁相环环节。锁相环原理如图2所示。

图2 锁相环模块原理图
为使估算角度更加精确,设计了角度误差信号PI调节环节,使输出的信号一直跟随目标信号。最后对锁相环进行稳定性分析,当该系统趋于稳定时,计算的转子位置的误差趋近于零。所以本文设计的数字锁相环能较好的达到位置和速度的追随效果,并具有良好的稳定性。
2 控制系统模型搭建与仿真
2.1 仿真模型搭建
永磁同步电机的无位置控制系统仿真模型,在Matlab/Simulink环境中搭建。模型主要包括SVPWM生成模块、PI控制模块、逆变器全桥及电机模块、反PARK变换模块、龙伯格观测器模块等。永磁同步电机的仿真模型系统参数见表1。永磁同步电机无位置控制仿真模型如图3所示。

表1 系统仿真参数设置
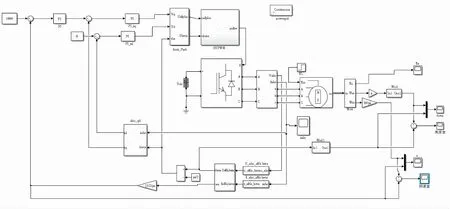
图3 永磁同步电机无位置控制系统仿真图
2.2 仿真结果
本文设计的永磁同步电机龙伯格观测器在空载启动时,系统稳定,性能良好,电机转速上升时间短而且平稳。系统超调量比较小,能在启动后的0.2 s内达到设定的转速并保持稳定;在0.5 s时加入5 N/M的负载后,系统能在0.2 s左右结束波动,保持转速稳定。说明本文搭建的龙伯格观测器永磁同步电机控制系统,鲁棒性能优异,抗干扰能力较强。龙伯格观测器永磁同步电机控制系统的转速仿真结果如图4所示。

图4 龙伯格观测器转速仿真波形图
图5为永磁同步电机龙伯格观测器的转子位置计算值仿真图。其中,黄线为转子实际的角度位置,蓝线为观测器估算的角度位置。由图中不难发现,估计值与实际值很接近,证明本文设计的观测器具有优异的转子位置跟踪能力。
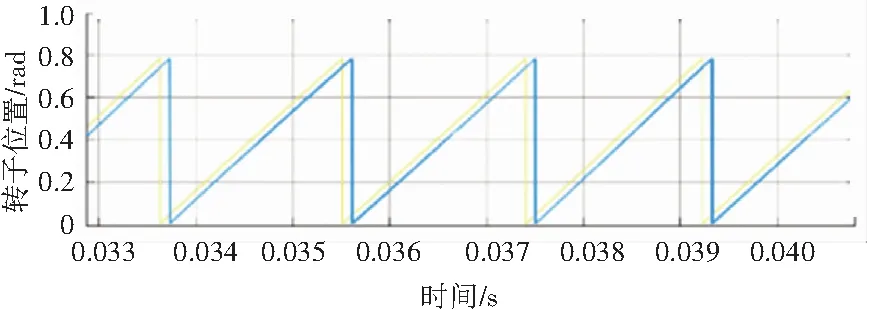
图5 龙伯格观测器估算转子位置图
3 永磁同步电机控制系统实现
3.1 控制器硬件设计
控制器硬件设计主要包括原理图设计、控制器PCB板布局设计、样板的焊接与调试等。原理图设计主要由以下电路设计组成:主芯片最小系统电路、MOSFET开关电路、控制电路、多级电源转换电路、电流采样电路、通信电路等。电路布局是硬件设计中重要的一个环节,需要考虑电流、电压和抗干扰等因素。设计后的控制器PCB布局如图6所示。
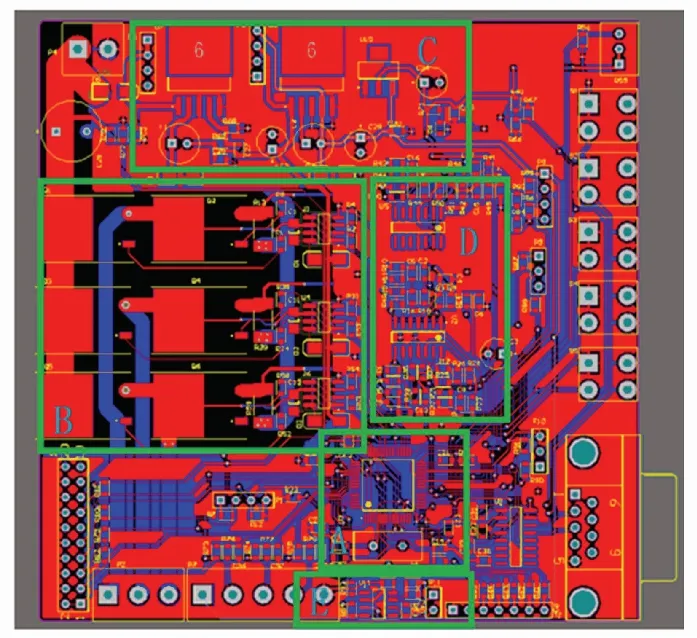
图6 汽车电子水泵控制器PCB板布局
图6中,A区是MCU布置区域,主要有时钟电路和供电稳压电路;B区布置了6个MOS管和其控制芯片;C区负责整个电路板的供电需求,负责各级电压转换;D区负责电流等采样功能;E区则是CAN通信芯片所在区域,负责控制器和其它模块通信的功能。
3.2 控制器软件设计
龙伯格观测器算法是整个控制器程序的核心。龙伯格观测器估算算法流程见图7。首先MCU的ADC模块在接到中断信号后,对电机的相电流进行采样,采集的相电流ia、ib和ic经过Clarke变换,获得电流的αβ分量;龙伯格观测器根据电流值与电压值,计算反电势的估算值,然后对其进行数字滤波处理;最后经数字锁相环计算出位置信息和转子速度值。
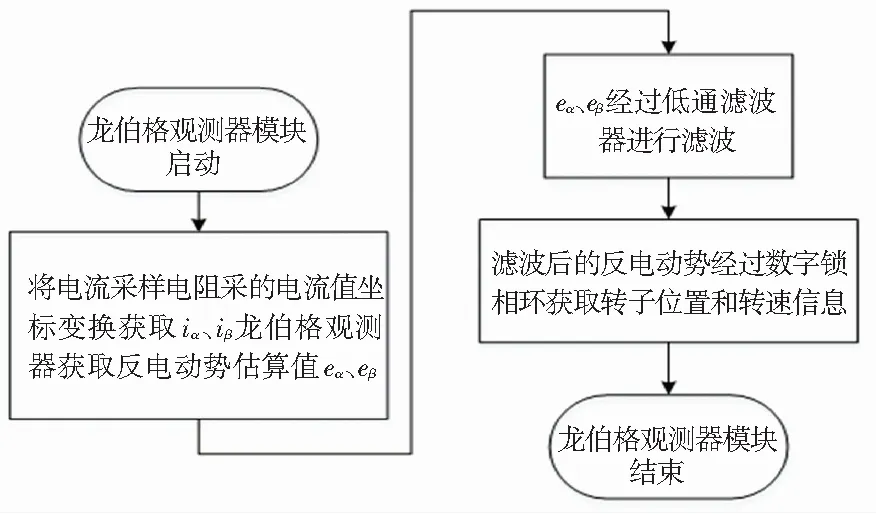
图7 龙伯格观测器估算算法流程图
4 实验结果分析
4.1 定子电流实验
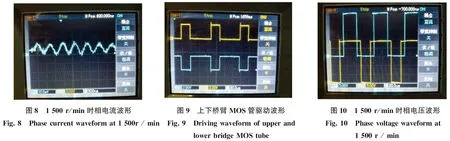
永磁同步电机在1 500 r/min时的电流实验结果如图8所示,其电压幅值大约为14 mV。因测量电阻为0.1 Ω,计算出的电流约为0.14 A,而实际直流电源显示电流也为0.14 A,证明了所测电流数据的有效性。由图8还可以看出,定子电流稳定,符合预期设想,电流畸变较小。
4.2 SVPWM实验
图9为同一桥臂内,上、下两桥臂的MOS管的驱动波形图,二个PWM波是具有死区时间的互补输出。图10为同一时刻一组开关顺序的电压测量图。由两图可以看出,二者电压符合预期3.3 V和24 V设置,并且波形为高质量的方波,毛刺较少。综上,波形表现符合控制器硬件设计和控制算法的设计,证明SVPWM算法与理论相符。
5 结束语
本文首先深入研究了龙伯格观测器原理,结合数学模型设计了永磁同步电机的龙伯格观测器模型,并且依此搭建了永磁同步电机的龙伯格观测器仿真模型。经过调试优化后仿真结果,反应出仿真模型的准确性和有效性,体现了龙伯格观测器技术在永磁同步电机控制中的优良性能。其次,设计了永磁同步电机控制器的硬件和软件程序,为实际永磁同步电机控制系统的设计提供了理论基础和指导思路。最后,进行基于龙伯格观测器的永磁同步电机实验,实验结果验证了该算法的正确性和有效性,对促进永磁同步电机的龙伯格观测器研究具有重要的价值和意义。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
防爆电机(2022年3期)2022-06-17
计算机与数字工程(2022年4期)2022-05-10
防爆电机(2022年2期)2022-04-26
防爆电机(2022年2期)2022-04-26
智慧电力(2022年1期)2022-03-02
计算机仿真(2021年3期)2021-11-17
电子技术与软件工程(2019年10期)2019-07-20
电脑知识与技术(2015年23期)2015-11-13
现代电子技术(2009年14期)2009-09-05