基于FPGA的四轴旋翼控制系统
2020-03-18 09:42贾明俊陆安江卢学敏唐鑫鑫黄文华
智能计算机与应用 2020年10期
贾明俊, 陆安江, 卢学敏, 唐鑫鑫, 黄文华
(贵州大学 大数据与信息工程学院, 贵阳 550025)
0 引 言
无人机飞控作为无人机的核心组件是至关重要的,目前在飞控领域大都使用STM32的架构设计的飞控,此类飞控具有算法通用,成本低廉的优势,但是相对于高精度以及高稳定的要求的场景,此类飞控还不能完全满足需要。传统的经典控制,单入单出(siso)、线性,时不变的。相对于传统控制理论学,现代控制理论是复杂的,紧密的,是自动控制理论的重要组成部分,它的理论基础是状态空间行为。在现代控制理论中,通常采用时域法去阐述系统的状态变量而完成控制系统的分析和设计[1]。
1 基本控制原理
(1)智能控制。人工智能和自动控制的结合就是智能控制。其能独立控制智能机器并实现其目标的自动控制。任务设置和模型创建的过程是智能控制的核心、特别关注符号及其环境的识别和知识库以及推理的设计和开发,而非数学公式的表述、计算和处理。为了达到让被控对象以预定要求完成任务的目的,以采用ai控制、电脑系统模拟行业之前积累的经验,从而创造相对宽泛的知识模型,应用于符号信息处理、开发编程、知识描绘、自学习等智能技术,通过系统过程进行理解、判断、预测和规划来论证与决策[2]。
(2)非线性控制。非线性控制一直以来作为复杂控制理论的巨大挑战之一,其发展的过程借鉴了线性控制。数学工具的局限性导致非线性系统的发展不是特别快速,如泰勒级数展开在很多情况下难以适应自身要求。经典理论中的相级方法仅适用于二阶系统,非线性单元的高阶系统使用描述函数方法作为一种近似方法。对于非线性系统中系统研究等发展困难,反观综合方法的使用得到了强有力的发展。
(3)自适应控制。自适应控制系统在确定所需的控制性能指标,自动的改变设备结构和参数以适应环境的变化前,需要不停地测量系统的输入、状态、输出或功率参数,参照接收到的信息,依据一定的设计方法逐步地理解和捕捉对象。
(4)鲁棒控制。在控制过程中需要考虑的一个问题是模型的不确定性,这种不确定性会导致系统的安全问题,鲁棒控制可以解决模型的安全问题。自适应控制设计控制器的基础模型参数是它的基本思想。由于控制参数的调改依靠模型参数的更新,所以不能提前考虑潜在的不确定性。为了解决不确定参数的问题,在构建鲁棒控制时选择利用不确定信息构建控制器。鲁棒控制一般适用于描述系统的不确定性,模型多样化,多元性。
(5)模糊控制。模糊控制总的思想是自高而下,自顶而下的、总体布局设计,不拘泥于最底层细节,从更高的维度架构整个设计。模糊控制并非是控制过程不清楚,也不表示控制器不明确,只是知识和概念的不清晰,其所完成的工作是完全安全的[3]。1974年,模糊集理论首次被英国工程师曼达姆(e.i.mamdam)应用于锅炉和蒸汽机的控制,自此开辟了模糊控制的新领域,特别是延时长、非线性、不好建模的,使用电脑实现模糊控制往往能取得好的效果。模糊控制有以下特征:宽泛的数学模型精确性、鲁棒性强(抗干扰能力强)、效果好、比较容易掌握控制。提出了一种将融合结构、融合算法和控制作为一个整体进行设计的模型,即神经模糊-3融合控制模型,又将使用同类的BP网络存储模糊规则并把经验“关联”在一起。
(6)神经网络控制。神经网络由简单的神经细胞组成,其连接重量为平行结构并且可调。神经网络控制是以神经网络为工具,模拟人脑简单结构的一种新的操纵和识别方法。神经网络在控制系统中既能当作对象模型,也能当作控制器。
2 FPGA应用
2.1 FPGA的优势
FPGA被称为现场可编程门阵列,其快速开发的特性,使之与传统的处理器截然不同,FPGA的主要应用于图像处理以及算法加速等。在大多数情况下,FPGA芯片在出厂时都是一颗空白的芯片,或者说是一颗半成品的芯片,这颗芯片内部的连线及具体要求需要用户通过编程来实现,即可以通过编程来更改内部结构的芯片,用户可根据自己的想法,将一颗FPGA 芯片做成实现具体要求的芯片。对于飞控处理器选型,选用FPGA设计主控,可以发挥其并行计算能力强和高速响应的优势,最大程度的提高飞控的性能。
2.2 FPGA飞控的无人机控制系统意义
FPGA的飞控应用是一个相对全新的领域,目前大都采用单片机去设计飞控,主流飞控有的不开源,有的开源所使用的语言不利于二次开发。所以本文基于循环芯片Age,基于硬件描述语言所写的飞控代码加上FPGA芯片本身在通信领域的优势,一方面,通信领域需要高速的协议处理,另一方面,通信协议随时变化,不适合生产专用芯片[4]。这使得能够灵活改变功能的FPGA芯片成为首选。
3 PS与PL交互
在使用zynq开发板制作系统时,需要考虑PS(Processing System,这里指是ARM)与PL(Progarmmable Logic,这里指FPGA)的交互。PS与PL交互指的是ARM处理器与FPGA在ZYNQ平台的通信方式。目前主要使用的接口有3种:AXI_LITE、AXI_STREAAM、以及AXI_STANDARD。AXI_lite接口一般用来进行简单的地址映射性通信。AXI_stream称为流通信,AXI总线分为5个通道:写应答通道,包含BVALID(有效),BRES(响应), BREADY(准备)信号;写数据通道,包含WVALID, WDATA(数据),WSTRB(选通),WREADY信号;读数据通道,包含RVALID,RDATA, RREADY, RRESP信号;写地址通道,包含AWVALID,AWADDR(地址),AWREADY信号;读地址通道,包含ARVALID,ARADDR, ARREADY信号;处理ps与pl的交互的过程其实就是处理好AXI通信协议的过程,时序图如图1所示。一般形象的把AXI协议称为握手协议。为了建立通信环路,TREADY信号是从设备告诉主设备做好准备,TVALID信号告诉从设备此刻起数据有效;ACLK信号是作为总线时钟,一般上升沿有效;ARESETn信号是总线复位,低电平有效;TUSER信号是用户自定义信号,根据需要设置;TSTRB信号为bit数的对应TDATA有效字节数,宽度为TDATA/8。不同于一般传输,AXI使用字节做单位,这样测量此信号方便转换。TLAST信号说明该次传输为突发传输结尾,也就是一次传输中一个包数据的结束。利用AXI协议传输的无人机数据高效并且可效验,设计中ip封装选用流接口,满足了无人机高效快速的需求。
4 FPGA飞控系统构建
虽然FPGA的飞控十分重要,整个系统由飞控、接收机、分电板,电调等部分组成,如图2所示。整个系统工作方式按照一定的顺序,首先遥控器以2.4 GHz传输频率发射控制指令,对码的接受机收到信号并开始解码,解码结果交由飞控从输入接口传入,将指令动作传给相应的飞控输出、传给分电板后控制电机做出相应动作。这种正相输入控制中,由于投放器所使用舵机较大,io口最大电压只有5 V,无法直接驱动大舵机,因此在中间增加EBC将电压增大到12 V,但这种设计在以后的测量中也会带来用电量过大的问题。。第二种负反馈工作模式是在飞控内部各种传感器配合下进行的,如加速度计,GPS,超声波、光流计等[5]。在某种姿态模式中(像自稳——自动保持水平),通过传感器收集的信息,经由FPGA飞控处理再次输出到电机端,从而达到调节姿态的作用。
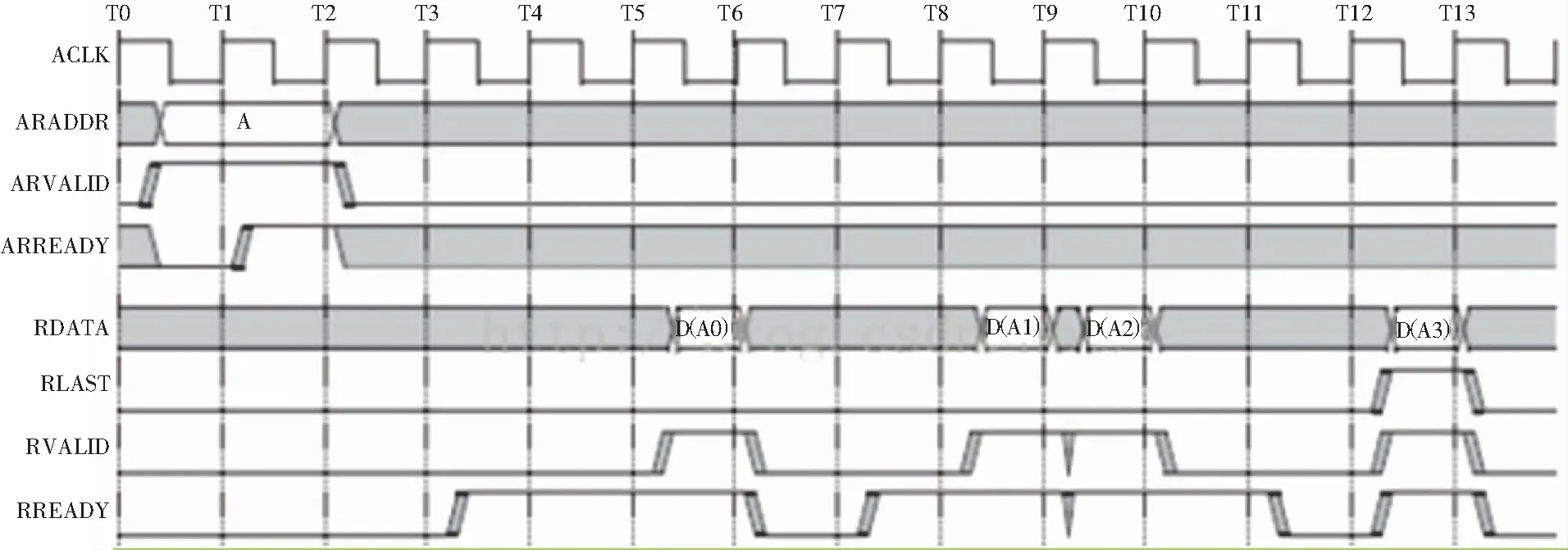
图1 通讯时序图
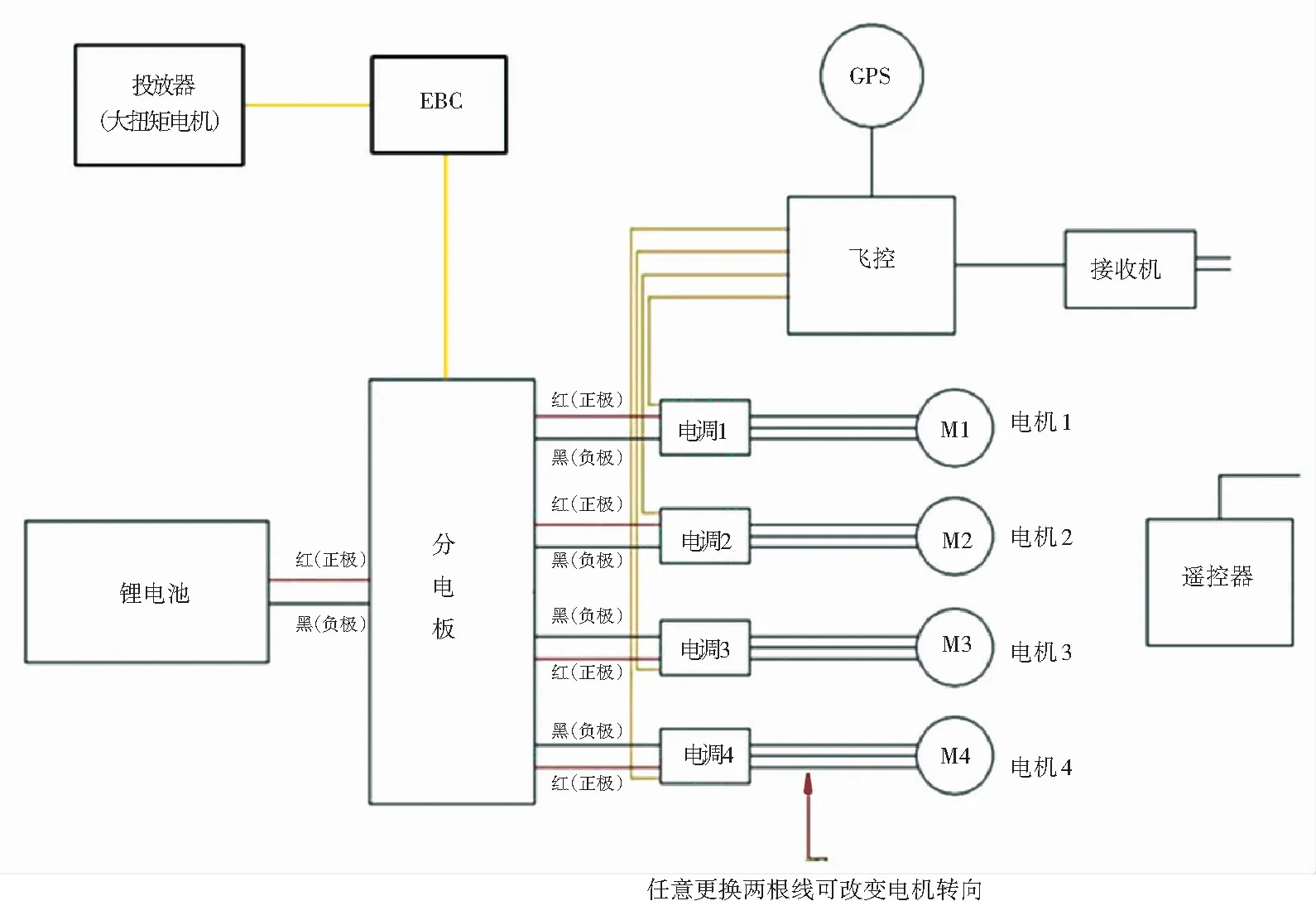
图2 无人机设计图
5 结束语
实际模式调节时,无人机一共定义了6种模式,分别是定高,定点,自动返航,无头模式、运动模式及自稳。此次设计的投放无人机主要应用于求助落水者,快速投放救生,给被困人员投放食物等、以及娱乐生活中的彩片投撒。飞控在实际测试过程中发现了一些问题,如飞控不是很稳定,还有舵机投放器功率太大,耗电加剧,导致飞控电流信号不稳定。后期将考虑优化滤波算法IP核,减小舵机以降低电压。同时测试中也暴露出载重能力有限的缺点,下一步工作将致力于提高材料强度和减小支架重量。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年2期)2022-03-09
汽车实用技术(2022年3期)2022-02-23
北京航空航天大学学报(2021年4期)2021-11-24
软件(2017年6期)2017-09-23
神州·中旬刊(2017年1期)2017-06-28
电子技术与软件工程(2017年11期)2017-06-10
科技创新导报(2017年1期)2017-03-21
现代电子技术(2009年13期)2009-08-31