含恰约束支链的驱动变胞机构构型综合与分析
2020-03-11 04:00:44胡旭宇刘宏昭
农业机械学报 2020年1期
胡旭宇 刘宏昭
(西安理工大学机械与精密仪器工程学院, 西安 710048)
0 引言
变胞并联机构由于具有随任务变化而变自由度、变拓扑结构的特点和高承载能力、高精度等优点,已成为机构学与机器人领域的研究热点之一。近年来,针对变胞并联机构已有了一些研究成果。KONG等[1]通过可锁运动副,提出一种新型三维平移和三维转动两模式变胞并联机构。TIAN等[2]通过开启与锁死杆件,基于变胞连杆,综合一类3R、1T2R、2T1R和3T四模式变胞并联机构。文献[3-4]通过将3个轴线交于一点的转动副替换球铰,提出了一种关节锁死的变胞球铰Sv。文献[5-7]提出了可锁移动副、可锁转动副等变胞运动副,并源于欠驱动3-CPS并联机构,综合了一系列变胞并联机构。刘江南等[8]分析变胞运动副的约束特征和结构方式,提出一种基于变胞运动副的变胞机构综合方法,并根据所提出的方法综合了一类连杆运输机构。李树军等[9]根据变胞运动副的类型和邻接关系,综合了带有变胞运动副约束形式的变胞机构。王冰等[10]基于具有解耦特性的变胞球面五杆机构,通过串联4自由度支链构造出变胞支链,应用3条相同的变胞支链综合了一类变胞并联机构。GAN等[11]提出了一种变胞虎克铰Uv,并分析了3-UvCUv变胞并联机构的几何约束。YE等[12]基于一种三构态的平面五杆变胞机构,通过构建混联支链,综合出含约束奇异特性的变胞并联机构。ZHANG等[13]基于Bennett闭链构建混联支链,提出一种新型变胞并联机构。于红英等[14]通过锁住不同运动副的方式实现变胞支链的构态变换,提出一种基于基本支链构型的变胞并联机构综合方法。刘伟等[15-16]提出了一类两模式可转换变胞并联机构。并联机构中,若存在与动平台自由度数目和类型都相同的支链,则该支链称为恰约束支链[17]。文献[18-20]提出了一系列含恰约束支链的并联机构,文献[21]提出了一种含恰约束的球面变胞仿生机构,当受到外界大冲击力时,机构被动实现变胞,并对其工作空间、刚度和承载力进行了优化。综上可见,学者们通过研究机构的支链奇异和约束奇异实现变胞。一些机构需在远离机架的运动副上安装伺服电机或关节锁死装置,这将影响机构的动态性能,并使机械结构变得复杂。现有文献关于驱动变胞并联机构的研究较少,特别是缺乏系统包含混联恰约束支链的多模式驱动变胞并联机构的相关研究。
本文基于一种三构态驱动变胞并联球铰,应用螺旋理论综合一类含恰约束混联支链的多模式驱动变胞并联机构。针对所综合的3-SPS/SmPU驱动变胞并联机构,根据螺旋理论分析各构态下机构的自由度,利用矢量法和几何约束关系建立机构全构态运动学模型。
1 3-RRR球面并联机构
如图1所示,3-RRR球面机构由定平台1、动平台2以及3条正交分布的支链组成,每条支链由3个转动副和两个圆弧形杆构成(支链1由R1、L12、R2、L23、R3构成,支链2由R4、L45、R5、L56、R6构成,支链3由R7、L78、R8、L89、R9构成)。以动平台2的中心为原点,以R1的转动轴线为X轴,R4的转动轴线为Y轴,建立定坐标系OXYZ。以R1的转动轴线为x′轴,R4的转动轴线为y′轴,在动平台2中心点建立动坐标系o′x′y′z′(初始状态时,动坐标系o′x′y′z′与定坐标系OXYZ重合)。
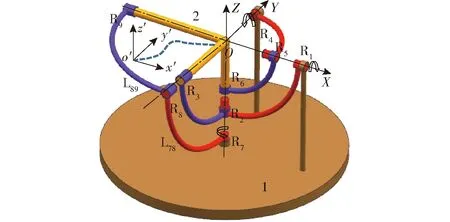
图1 3-RRR球面机构Fig.1 3-RRR spherical mechanism
通过对3-RRR球面机构的自由度分析可知,其具有3种转动构态[22]:构态1,只驱动R1,绕X轴转动;只驱动R4,绕Y轴转动;只驱动R7,绕Z轴转动。构态2,同时驱动R1和R4,绕X轴和Y轴转动;同时驱动R1和R7,绕X轴和Z轴转动;同时驱动R4和R7,绕Y轴和Z轴转动。构态3,同时驱动R1、R4和R7,实现三维转动。由于3-RRR机构具有一维、二维和三维3种转动构态,其三维转动构态与球铰等效,故3-RRR球面机构也可称作驱动变胞并联球铰Sm。
根据转动副R3、R6、R9轴线与中间转动副R2、R5和R8轴线分别垂直,可得
(1)
式中,ai(i=2,3,5,6,8,9)为转动副Ri中心点的位置坐标矢量。
根据式(1)可得动平台2杆的运动学方程为
(2)
式中,α′、β′和γ′分别为动平台2绕动坐标系o′x′y′z′的转动角。θ1、θ2和θ3分别为驱动副R1、R4和R7的转动角。其中机构动平台旋转矩阵R采用Y-X-Z型欧拉角。同样可求得当驱动副R1、R4和R7的转动角θ1、θ2和θ3任两个等于零时,为构态1的运动学逆解,当θ1、θ2和θ3中任一个等于零时,为构态2的运动学逆解。
2 驱动变胞混联支链综合
因变胞球铰构态3具有3个转动自由度,可将其与3自由度串联支链混联,得到具有不同约束性质的变胞混联支链。为实现混联支链的变胞,随着变胞球铰构态的变化,应根据作业任务的不同在具有1个约束力矢和约束力耦、2个约束力矢以及无约束3种不同的工作模式间切换,以便应用于变胞并联机构的设计。如令变胞球铰只开启驱动副R1时,变胞混联支链受到1个约束力矢和1个约束力耦作用,即具有2R2T自由度,定义为FC支链;变胞球铰只开启驱动副R7时,变胞混联支链受到2个约束力矢作用,即具有3R1T自由度,称为F支链;变胞球铰驱动副R1、R4和R7全部开启时,变胞混联支链不受约束,即具有3R3T自由度,称为N支链。
2.1 FC支链构型综合
变胞球铰只开启R1时,变胞混联支链具有2R2T自由度,受到1个约束力矢和1个约束力耦作用,其约束螺旋设为
(3)
根据各运动螺旋与其约束螺旋互易[23],可求得基本的运动螺旋为
(4)
由基本运动螺旋可表示其所对应的全部运动螺旋集为

(5)
式中,a、b、c和d为不同时为零的任意常数。
2.2 F支链构型综合
变胞球铰机构只开启R7时,受到2个约束力矢作用,其约束螺旋设为
(6)
根据各运动螺旋与其约束螺旋互易可求得基本的运动螺旋为
(7)
由式(7)可得,其所对应的全部运动螺旋集为

(8)
由于FC支链与F支链需同时满足才能达到所需运动模式,故混联支链的运动螺旋集为

(9)
由于变胞球铰3个驱动副全部开启时,具有3个转动自由度,而混联支链为无约束N支链,故需在驱动变胞球铰动平台上连接3自由度串联支链(不含对运动模式不起作用的惰性运动副)。根据式(9)可得
(10)
为使式(10)中3个运动螺旋线性无关,则需
(11)
根据式(10)和式(11),可得驱动变胞混联支链的具体形式如表1所示。

表1 驱动变胞混联支链Tab.1 Actuated metamorphic hybrid kinematic chains
3 含恰约束支链的驱动变胞并联机构构型综合
由于变胞并联球铰的动平台连接了3自由度串联支链,根据并联机构驱动副选取准则,含恰约束支链的驱动变胞并联机构需要添加3个驱动副,才能满足锁住全部驱动副后,机构自由度为零,如添加3条含驱动副的六自由度支链即可满足。根据文献[15],部分六自由度支链如表2所示。
即任取表1中1条支链作为主动混联恰约束支链,与表2中任意3条支链并联构成含主动恰约束混联支链的驱动变胞并联机构。图2为综合出一种含主动恰约束混联支链的3-SPS/SmPU驱动变胞并联机构。

表2 6自由度支链Tab.2 Branched chains of fixed six degrees of freedom

图2 3-SPS/SmPU驱动变胞并联机构Fig.2 3-SPS/SmPU actuated metamorphic parallel mechanism
4 3-SPS/SmPU机构自由度分析
4.1 驱动变胞并联机构的结构特点
如图2所示,3-SPS/SmPU驱动变胞并联机构由驱动变胞球铰Sm与PU混联而成的SmPU主动恰约束混联支链、3条含驱动副的SPS支链、定平台和动平台组成(图中箭头表示驱动副)。以动平台中心(即U副中心)为原点,以原点到S33的中心点为-y轴,垂直动平台方向为z轴,在动平台上建立动坐标系oxyz。定坐标系仍采用驱动变胞球铰中建的定坐标系OXYZ(图1)。动平台和定平台中3个S副均呈正三角分布,其中球铰S11位于XOZ平面内。
定义3-SPS/SmPU变胞并联机构在驱动变胞球铰3个驱动副全部锁死时的运动模式为构态0,其余运动模式随驱动变胞球铰的构态分为3种构态。由于驱动变胞球铰构态1和构态2下的3种运动模式情况相似,故3-SPS/SmPU变胞并联机构每种构态只分析其中1种。
4.2 构态1机构自由度分析
当3个移动驱动副开启时,由于3条六自由度SPS支链不对机构的运动起约束作用,故只需分析3-SPS/SmPU机构中恰约束支链SmPU的自由度即为3-SPS/SmPU变胞机构的自由度。在构态1中,设驱动副R4和R7锁定,只驱动R1,SmPU主动混联恰约束支链在定坐标系下的运动螺旋为
(12)
式中,(a,b,c)表示U副中心点在固定坐标系下的坐标。根据运动螺旋与其约束螺旋互易求得支链的约束螺旋
(13)
根据式(12)、(13)以及文献[21]中的自由度计算公式,可得3-SPS/SmPU变胞并联机构在此运动模式下的自由度为
其中
d=6-λv=k-t
式中M——机构自由度数
d——机构阶数
λ——公共约束数
n——包括机架的构件数目
g——运动副数目
fi——第i个运动副的自由度
v——多环并联机构在去除公共约束因素后的冗余约束的数目
t——多环并联机构所有支链的反螺旋去除公共约束后的反螺旋数目
k——多环并联机构所有支链的反螺旋去除公共约束后的反螺旋系的最大无关组
ξ——机构中存在的局部自由度数
由此可知,只驱动R1时,此混联恰约束支链具有绕X、Y轴转动和平行于YOZ平面二维移动自由度。即当3个移动驱动全部开启时,变胞并联机构在此构态下具有4个自由度。
4.3 构态2机构自由度分析
此构态下,锁定一个驱动,设R7锁定,当只驱动R1和R4时,主动混联恰约束支链运动螺旋除式(12)之外,还需加绕Y轴的转动自由度
(14)
根据运动螺旋式(12)和式(14),求得混联恰约束支链的约束螺旋为
(15)
根据式(15)和自由度计算式,可得此构态下的自由度为
M=6(16-19-1)+32+0-3=5
由此可知,当驱动R1和R4时,此变胞并联机构具有绕X、Y轴转动和三维移动自由度。
4.4 构态3机构自由度分析
同时驱动R1、R4和R7,主动混联恰约束支链运动螺旋除式(12)和式(14)之外,还需加绕Z轴的转动自由度
(16)
由于没有螺旋与此构态下运动螺旋式(12)、式(14)和式(16)同时互易,故此构态下恰约束支链的自由度为6,即此构态下3-SPS/SmPU机构自由度为6。
同样可以得到,构态1中只驱动R4(或R7)运动模式下的自由度和构态2中同时驱动R4和R7(或R1和R7)时3-SPS/SmPU的自由度。通过对3种构态下自由度的计算可知,不同驱动所对应的3-SPS/SmPU驱动变胞并联机构运动模式如表3所示。

表3 3-SPS/SmPU变胞并联机构的运动模式Tab.3 Motion mode of 3-SPS/SmPU actuated metamorphic parallel mechanism
表中,F表示约束力,C表示约束力偶,字母前的数字代表约束个数,N表示无约束。表3中各构态下3-SPS/SmPU的3个移动驱动副均开启。
由表3可知3-SPS/SmPU驱动变胞并联机构具有8种运动模式。
5 3-SPS/SmPU机构运动学分析
变胞并联机构全构态运动学是变胞并联机构研究的重点,同时也是机构性能分析和动力学分析的基础。已知3-SPS/SmPU变胞并联机构动平台的位姿(设动平台绕动坐标系x、y、z轴转动角为α、β和γ,动平台质心点的位置为(x,y,z)),求驱动副R1、R4和R7转动角(θ1、θ2和θ3)和驱动杆L1、L2和L3的长度(L1、L2、L3)。
5.1 运动学分析
如图2所示,定平台上的3个S副中心点在定坐标系下的位置矩阵为
(17)
式中r7——定平台上3个S副构成的正三角形外接圆半径
e——定坐标系中心到定平台的垂直距离
动平台上的3个S副在动坐标系的位置矢量矩阵为
(18)
式中r8——动平台上3个S副构成的正三角形外接圆半径
机构动平台旋转矩阵R采用X-Y-Z型欧拉角,即
B(αX,βY,γZ)=[BXα][BYβ][BZγ]
(19)
根据旋转矩阵的定义,动平台上3个S副在定坐标系下的位置矢量矩阵为
(20)
根据Ai与Bi(i=1,2,3)对应坐标之差为驱动杆长Li,可得
(21)
设恰约束支链中移动杆长为h,根据3-SPS/SmPU机构的几何关系以及驱动变胞球铰的运动学,可得动平台2杆在定坐标系的方向向量
(22)
动平台2杆的方向向量也可表示为
(23)
化简式(22)和式(23)可得
(24)
根据式(2)和式(24)可得
(25)
式(21)、(25)即为3-SPS/SmPU并联机构的位姿逆解方程。
分别对式(21)和式(25)对时间求导,可得机构3-SPS/SmPU在构态3下的雅可比矩阵为

(26)

式中J——机构雅可比矩阵


对式(26)两边求关于时间的导数即可得机构驱动副的加速度

(27)



同理可求得 3-SPS/SmPU变胞并联机构构态1和构态2下机构的运动学逆解,即可得到含主动混联恰约束支链的3-SPS/SmPU驱动变胞并联机构全构态运动学逆解。
5.2 运动学仿真
从图3~8 可以看出,3-SPS/SmPU并联机构的驱动速度(移动速度和角速度)和驱动加速度(移动加速度和角加速度)曲线较为平滑,运动平稳,机构运动性能较好。对3-SPS/SmPU驱动变胞并联机构运动学的分析为机构的力学性能和实际工业应用奠定了理论基础。且由于运动学是研究机构运动参数输入与输出之间[24-25]的映射关系,故同时也验证了含混联恰约束支链的驱动变胞并联机构的可行性。
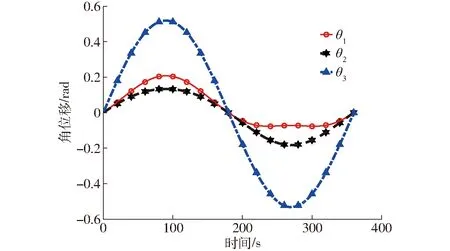
图3 3-SPS/SmPU变胞并联机构驱动角位移Fig.3 Angle displacement of 3-SPS/SmPU metamorphic parallel mechanism

图4 3-SPS/SmPU变胞并联机构移动位移Fig.4 Displacement of 3-SPS/SmPU metamorphic parallel mechanism

图5 3-SPS/SmPU变胞并联机构角速度Fig.5 Angle velocity of 3-SPS/SmPU metamorphic parallel mechanism

图6 3-SPS/SmPU变胞并联机构移动速度Fig.6 Velocity of 3-SPS/SmPU metamorphic parallel mechanism

图7 3-SPS/SmPU变胞并联机构角加速度Fig.7 Angle acceleration of 3-SPS/SmPU metamorphic parallel mechanism
6 结论
(1)基于3-RRR球面机构,利用螺旋理论提出了一类含主动混联恰约束支链的驱动变胞并联机构。

图8 3-SPS/SmPU变胞并联机构移动加速度Fig.8 Acceleration of 3-SPS/SmPU metamorphic parallel mechanism
(2)通过开启与锁死3-RRR球面机构驱动副的数目,3-SPS/SmPU驱动变胞并联机构可实现8种运动模式,分析机构各构态的自由度和运动学,验证了驱动变胞并联机构的可行性。
(3)通过开启与锁死驱动副实现并联机构变胞的方法也可适用于其他变胞并联机构的构型综合,其变胞方式简便易行,全构态逆运动学求解简单,且该类变胞并联机构可有效避免变胞过程中的约束奇异和支链奇异。
猜你喜欢
湖南电力(2022年3期)2022-07-07 08:56:36
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
制造技术与机床(2019年7期)2019-07-22 03:42:24
电子制作(2018年17期)2018-09-28 01:57:02
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
实用手外科杂志(2015年2期)2015-08-28 09:50:56
饲料博览(2015年4期)2015-04-05 10:34:14
北京航空航天大学学报(2014年1期)2014-12-19 08:58:38