近水平冻结孔光纤陀螺测斜技术应用研究
2020-03-09 09:09姜国静李方政周晓敏
隧道建设(中英文) 2020年1期
姜国静, 李方政, 周晓敏
(1. 北京科技大学, 北京 100083; 2. 北京中煤矿山工程有限公司, 北京 100013)
0 引言
人工地层冻结法(artificial ground freezing method)简称冻结法,是一项加固含水地层的特殊工法。冻结法已有100多年的应用历史,过去主要应用于矿山竖井建设。从20世纪50年代末开始,随着国外城市地下工程的兴起,冻结法逐渐向除矿井外的其他领域应用发展,其中以地铁工程、地下污水管道工程、围堰工程等为主要发展方向。尤其是从20世纪80—90年代以来,隧道内施工的近水平冻结技术得到应用,解决了大量特殊条件下的隧道施工问题,如水体、道路、管线、房屋下的隧道施工,从而大大拓展了冻结法在城市地下工程中的应用领域。近年来,随着隧道及地下工程建设的蓬勃发展[1-4],近水平冻结技术得到广泛应用,长距离大体量冻结工程不断涌现。为满足相邻冻结孔交圈的需要,软土地层近水平冻结钻孔的精度控制是关键[5-6]。
冻结法的创新提升源于解决复杂工程建设的需要。受限于常规应用的联络通道及盾构进出洞冻结工程,钻孔的距离一般较短,常规的跟管钻进法及夯管法已趋于成熟。由于钻孔距离短,通常小于20 m,因此采用传统的灯光测斜方法可以满足工程需要。王胜利[7]从地铁旁通道水平冻结孔的特点出发,针对经纬仪灯光测斜法进行了理论分析。随着近年来一线城市轨道交通建设率先步入空间立体网络化发展,轨道交通建设立体交叉穿越,长距离近水平冻结工程(长度超过20 m)不断涌现。过去成熟的灯光法测斜已难以满足长距离钻孔测斜的需要。赵玉明等[8]从冻结孔使用工况特点出发,对光纤陀螺测斜仪的原理进行分析,提出了光纤陀螺对冻结孔测斜的适用性。目前,针对长距离近水平冻结孔测斜难题,尚未见到相关文献进行论述,因此亟需针对于近水平长距离冻结孔测斜开展深入研究。
1 光纤陀螺测斜仪的原理及优点分析
1.1 顶角测量原理
顶角的测量是通过重力加速度元件来实现的。在重力场中,线加速度计可以测量重力加速度变化。当其敏感轴向垂直于水平面时,加速度计指示单位重力加速度;若敏感轴向发生倾斜,其输出为重力加速度与倾斜角度的正弦函数之乘积。顶角的测量原理图见图1。
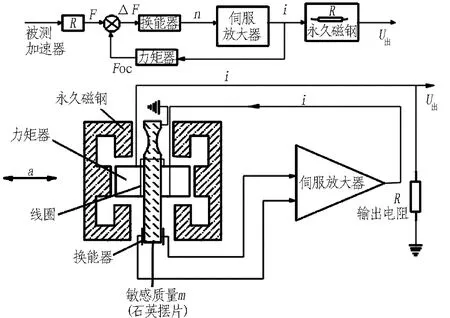
图1 石英重力加速度计原理图
U出=K·Sinθ。
(1)
式中:U出为输出电压;K=mg/BL(m为质量;B为磁通密度;L为导线长度);θ为敏感轴向与重力加速度方向的夹角。
1.2 方位角测量原理
光纤陀螺元件是一种高精度角速度测量元件,也是一种重要的惯性导航元件。通过测量地球自转角速度矢量的大小以及该矢量在钻孔轴线上的分量来计算、确定钻孔的方位角。
发光二极管发射的光被光纤耦合器耦合到光线环的两端,并沿相反方向传输,最后由同一耦合器输送到光电检测器中。当光纤环不旋转时,2束光将产生相消或相长的干涉; 当光线环以角速度Ω顺时针或逆时针旋转时,光电检测器会检测到Sagnac相差[9-12]。光的Sagnac效应原理图见图2。
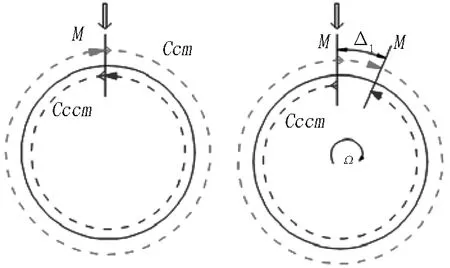
图2 光的Sagnac效应
Δθ=2πΩLD/cλ。
(2)
式中:L为光纤长度;D为光纤直径;c为光在真空中的传播速度;λ为光源光波长。
对于光纤长度一定的光纤陀螺测斜仪,在光源波长已知的情况下,通过式(2)就能确定Δθ与Ω的一一对应关系。光纤陀螺系统原理图见图3。
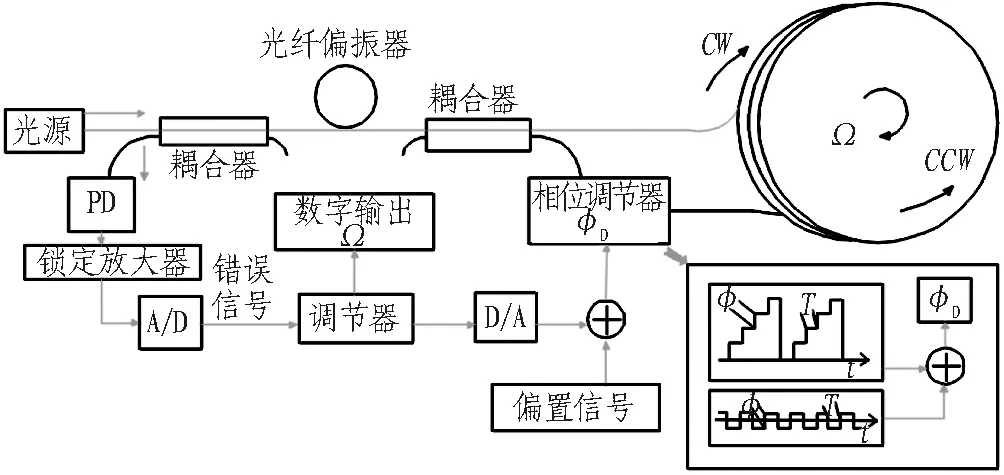
图3 光纤陀螺系统原理图
1.3 光纤陀螺测斜仪优点分析
针对光纤陀螺测斜仪的特点,与其他相关测斜仪器对比,主要优势如下[13-15]:
1)漂移小、精度高、各测点之间的数据没有关联,消除了以往陀螺测斜仪的累计误差,有效地提高了钻孔轨迹测量结果的准确性。
2)工作过程自动寻北,不需要地面初始定向,测量前后均无需校北,消除了人为误差。
3)不受地质和周围环境影响,抗磁性干扰,可在钻杆、磁性套管及磁性矿区使用。
2 近水平冻结孔光纤陀螺测斜仪难点分析及解决方法
2.1 水平孔与垂直孔方位角精度对钻孔测斜精度的影响对比分析
顶角采用重力加速度元件进行测量,顶角的分辨率高达0.01°,精度可以达到0.1°,对于顶角测量,在水平与垂直钻孔测斜中测量及计算方法相同,测量精度可有效满足现场需要。
不同于顶角的测量计算方式,水平冻结孔与垂直冻结孔在方位角测量精度对钻孔最终测量结果的影响上存在较大区别。水平冻结孔与垂直冻结孔方位角测量示意图见图4。
在垂直冻结孔施工中,按照规程要求,在冲积层中靶域半径按3‰控制,基岩层按5‰控制。纵使钻孔深度达到1 000 m时,靶域半径为3~5 m,方位角的误差按最大2°计算,理论误差仅为174 mm。
在水平冻结孔测量中,由于钻孔的进深相当于垂直孔的靶域半径,以钻孔进深40 m计算,误差为1 396 mm。显然,难以满足工程需要。
因此,水平冻结孔中如何实现方位角测量的精准性成为关键。
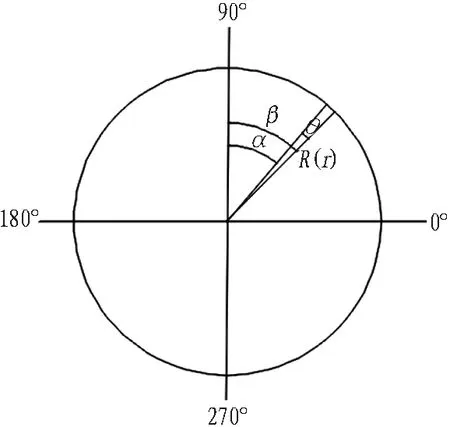
α—真实方位角; β—实测方位角; θ—方位角偏差; R—垂直孔中代表靶域半径; r—水平孔中代表进深长度。
2.2 近水平冻结孔测斜难点分析
光纤陀螺是光纤惯性组合测斜系统的核心测量传感器,其误差是决定测斜系统测量精度的主要误差源。光纤陀螺误差可以分为确定性误差和随机误差2部分,其中确定性误差可以通过精确标定加以补偿,随机误差则成为影响光纤陀螺测斜系统长时间工作精度的主要误差源[7-10]。光纤陀螺测斜仪特殊的工作环境直接导致仪器需要承受振动冲击、温度梯度大、姿态不稳定等的影响。环境条件是引起惯性仪表误差的主要因素。
近水平冻结工程冻结管一般采用内接箍的连接方式。与外接箍的连接方式相比,内接箍有诸多优势: 1)内接箍能有效地降低焊缝位置附近的弯曲应力和剪切应力; 2)由于接头处的外径与冻结管的其他部位相等,减少了地层对冻结管约束,能降低冻结管的温度应力和位移约束应力。内接箍结构示意图见图5。
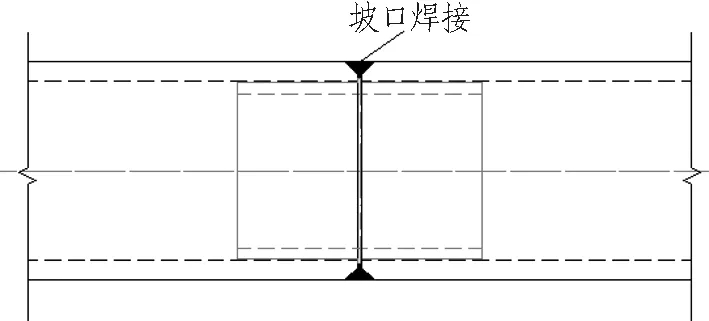
图5 内接箍结构示意图
冻结管内接箍的存在极大改善了接头部位的受力状态,对防止冻结管断裂是有效的,但由于内接箍的存在,造成冻结管内部出现了1个小台阶,以φ108×10的冻结管为例,内接箍的尺寸为φ95×8。由于冻结管的内径是88 mm,内接箍内径是79 mm,造成在接箍位置存在4.5 mm的小台阶。
水平冻结孔中光纤陀螺仪的下放不同于垂直孔中依靠自身重力进行下放的方式,水平冻结孔中进行水平光纤陀螺测斜仪下放必须给它提供一个驱动力。内接箍的存在,一方面给水平光纤陀螺测斜仪的平稳下放造成了一定的阻力,另一方面造成了水平光纤陀螺测斜仪在冻结孔的姿态稳定控制难。
从冻结管特征分析,水平光纤陀螺仪的测量误差主要集中在姿态的不稳定性; 从现有水平光纤陀螺仪方位角精度分析,水平光纤陀螺方位角的测量精度难以满足现场需要。因此,如何保持水平光纤陀螺在测量过程中的姿态稳定性及提高水平光纤陀螺测斜仪的方位角测量精度是水平光纤陀螺测斜仪在近水平冻结孔中成功应用的关键。
2.3 近水平冻结孔光纤陀螺测斜仪技术指标
为实现光纤陀螺测斜技术在市政冻结工程近水平冻结孔中的应用,研发了国内首款近水平光纤陀螺测斜仪(见图6)。水平光纤陀螺测斜仪质量为10 kg,外径为40 mm,长度为1 950 mm。
近水平光纤陀螺测斜仪主要技术指标: 顶角测量范围为0°~45°,测量精度为±0.1°,分辨率为0.01°; 方位测量范围为0°~360°,测量精度为±2°(纬度0°~±45°)。
我想起了二丫,眼里很快洇出泪来。我哽咽着说:“二丫说想吃槐花糕……都蒸出锅了,尝都冇尝一口,就那样走了,饿着肚子走了……”

图6 近水平光纤陀螺测斜仪
2.4 近水平冻结孔光纤陀螺测斜方法
为克服以上难点,创新设计采用预先下放φ73×5的PE塑料套管的形式来克服内接箍对水平光纤陀螺测斜仪姿态的影响,采用穿墙线+铰接链接的方式进行水平光纤陀螺仪的平稳下放与控制。图7示出近水平光纤陀螺测斜仪在冻结管中的状态,图8示出近水平光纤陀螺测斜仪测斜断面。

图7 近水平光纤陀螺测斜仪在冻结管中的状态示意图
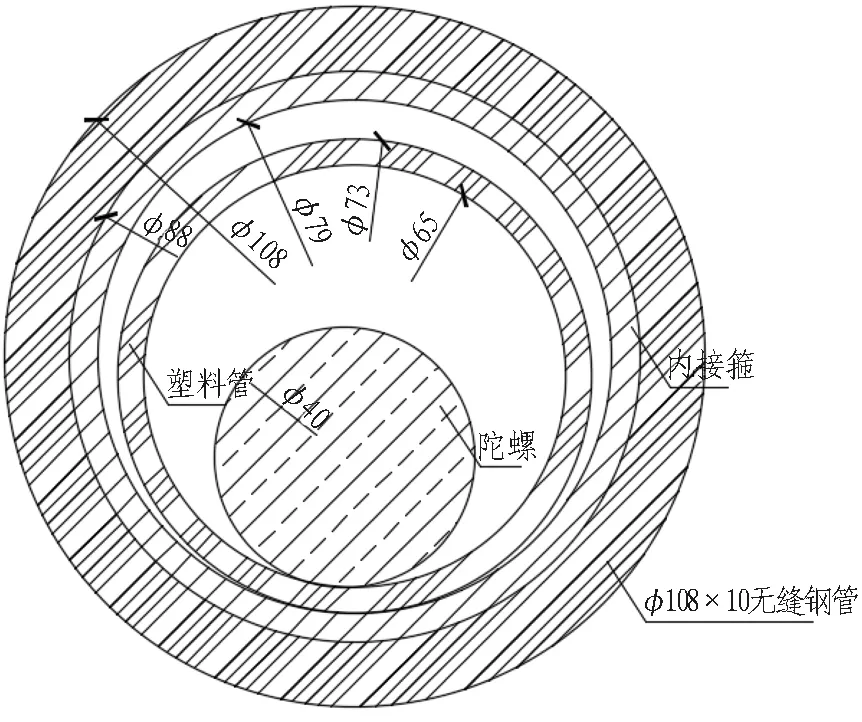
图8 近水平光纤陀螺测斜仪测斜断面示意图
预先下放φ73×5的PE塑料套管作为测斜套管,首先将盘旋的测斜套管做拉伸处理;为了保证顺利下放,采用热熔的方式对测斜套管端头做30°锤头形处理,下放到孔底。
采用直径为25 mm的塑料穿墙线与陀螺测斜仪尾端进行铰接连接,然后保持匀速下放,下放过程中每隔3~5 m采点,每个点测量3次,将陀螺仪拉出过程中采用同样的采点方法,采点位置相同,每个测点累计测量6次。近水平冻结孔水平光纤陀螺测斜仪现场应用见图9。

图9 近水平冻结孔水平光纤陀螺测斜仪在工程中的应用
3 近水平冻结孔水平光纤陀螺测斜仪测量结果对比分析
3.1 灯光测斜法
在近水平冻结孔短距离测量中,灯光测斜法被认为是一种较准确的测斜方法。它是利用光的直线传播原理,通过在冻结孔中置入光源,通过测量经纬仪直接读取顶角,采用相似三角形的原理来计算冻结孔的水平偏移量。近水平冻结孔灯光法测水平偏移原理示意图见图10。
图10中:AC为水平冻结管长度;A为冻结管开孔位置;A′为同一圆环管片对侧相同的位置。根据相似三角形原理,利用经纬仪正镜和倒镜(反向倒转180°)可将C的水平偏距相似投影至管片上,即A′B,则α=arcsin(A′B/AB),其中A′B和AB的距离值均可在隧道内直接测量。因此,冻结孔AC的终孔水平偏距可表示为ACsinα。
3.2 测量结果对比分析
对水平光纤陀螺测斜仪每个点取得的数据首先剔除奇异点,然后做平均值处理。
以灯光法测斜结果为参考,选取成孔质量良好的钻孔采用灯光测斜法选取8个测试点,水平光纤陀螺仪选取9个测试点,拟合钻孔偏移轨迹后,分别对钻孔轨迹垂直偏移量和水平偏移量做对比分析。灯光法与陀螺仪法测垂直方向偏移轨迹结果对比见图11,灯光法与陀螺仪法测水平方向偏移轨迹结果对比见图12。
由图12可知: 采用灯光测斜法与水平光纤陀螺测斜法,在水平方向上轨迹趋势一致,偏移量最大误差在200 mm以内。采用预先下塑料套管法以及穿墙线+铰接连接陀螺仪的下放工艺,有效确保了水平光纤陀螺仪在近水平冻结孔中的姿态稳定性。
4 结论与建议
从近水平光纤陀螺测斜的难点出发,通过对水平光纤陀螺测斜仪原理、使用工况及现场应用进行分析,得出以下结论及建议。
1)水平光纤陀螺测斜仪采用重力加速度计测量顶角的方法可靠,与灯光测斜法相比,钻孔轨迹垂直方向最大测量误差在30 mm以内。
2)采用预先下塑料套管法进行测斜的方式可以有效克服冻结管内接箍对水平光纤陀螺测斜仪造成的姿态不稳定性。
3)采用穿墙线+铰接连接水平光纤陀螺测斜仪的方式,保证了水平光纤陀螺测斜仪的有效平稳下放,减小了在测量下放过程中对陀螺仪的约束,确保了陀螺仪测量过程中的姿态平稳。
4)与灯光测斜法相比,水平方向测量误差可以控制在200 mm以内。
5)建议对水平光纤陀螺测斜仪的方位角测量精度及算法开展进一步研究,以提高方位角的测量精度。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
阅读(科学探秘)(2020年6期)2020-08-28
物理通报(2020年2期)2020-05-18
现代计算机(2018年19期)2018-08-01
中学数学杂志(初中版)(2017年6期)2018-01-05
百科探秘·航空航天(2017年9期)2017-12-31
百科探秘·航空航天(2017年9期)2017-11-07
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
山东工业技术(2016年15期)2016-12-01
科技创新与应用(2016年9期)2016-05-14