
混合动力汽车多动力源耦合传动系统的扭转共振控制方法
2020-03-08 02:29金鑫君
河南科技 2020年35期
关键词:控制
金鑫君

摘 要:为减小多动力源耦合传动系统中存在的扭转共振危害,保障车辆动力传动系统安全可靠运行,提高复杂机电系统的可靠性,本文以系统复杂、耦合程度高的混合动力汽车为研究对象,提出了一种多动力源耦合传动系统的扭转共振控制方法。其间通过比较传动系统在不同工作状态下的扭振是否落入各零部件固有振动频率范围来控制动力源转速和动力源状态,从而建立扭转共振回避控制方法。结果表明,在传动系统扭转共振控制方法的基础上,利用采集的振动信号与零部件中的固有频率进行比较计算,比较有效地减少共振发生的次数。
关键词:扭振;油电混合动力;扭转共振;控制
中图分类号:U463.2文献标识码:A文章编号:1003-5168(2020)35-0039-04
Abstract: In order to reduce the torsional resonance hazard in the multi-power source coupling transmission system, ensure the safe and reliable operation of the vehicle power transmission system, and improve the reliability of the complex electromechanical system, this paper took the hybrid electric vehicle with complex system and high coupling as the research object, and proposed a torsional resonance control method for a multi-power source coupling transmission system. In the meantime, by comparing whether the torsional vibration of the transmission system under different working conditions falls into the natural vibration frequency range of each component, the speed of the power source and the state of the power source were controlled, thereby establishing a torsional resonance avoidance control method. The results show that, based on the torsional resonance control method of the transmission system, using the collected vibration signal to compare and calculate with the natural frequency of the parts can effectively reduce the number of resonance occurrences.
Keywords: torsional vibration;hybrid electric vehicle; torsional resonance;control
混合動力汽车搭载至少两套驱动系统,无论在动力性能上还是续航里程上,都明显优于单一动力源的纯电动汽车和内燃机汽车。混合动力汽车常见的驱动类型为油电混合动力,包括电驱动系统和内燃机驱动系统,两个不同性质的动力源针对不同的驱动系统,两个不同的驱动系统则通过机电耦合实现高度集成。混合动力传动系统为车辆传递动力扭矩的关键环节,其传递路径、耦合程度以及响应速度等影响着车辆的舒适性、动力性、经济性和安全性。
混合动力汽车动力耦合通常采用行星机构动力耦合,丰田THS系统采用两个电机(MG1、MG2)、一个行星齿轮、一个离合器对不同动力源的动力扭矩进行耦合。黄海瑞分析了客车行星混联式多动力源耦合系统中存在的行星齿轮机构的非线性动力学问题与电机快速响应特性均可能恶化传动系统的扭振状况[1];于福康研究某P2构型并带有CVT变速器的混合动力SUV的CVT变速器动力学特性[2];钟必清等人针对某混联式客车动力传动系统,在典型工况下进行台架试验,使用动力学参数识别和发动机激励转矩修正的方法仿真和分析混合动力传动系统扭振的力学性能[3]。孟德建等人针对发动机、电动机和行星齿轮系等子系统组成的混联式混合动力传动系统,建立了混合动力驱传动系统扭转动力学模型,研究在纯电动、混合动力和停车充电工作模式下系统的固有特性和瞬态响应,结果发现,整车加速度瞬态响应与激励源干扰力矩的频率成分相同,在启动电机工作阶段和停机阶段低转速运行时,转矩波动引起的整车纵向振动较大,模式切换造成激励源转矩突变,行星齿轮系统的角加速度波动幅值明显增大[4]。韩清振在并联混合动力传动系统模型的基础上,通过拉格朗日方法建立了对应的当量化模型,尝试在并联模式下探究传动系统平衡点的稳定性[5]。有研究针对小型2缸内燃机并联式混合动力汽车的动力系统,提出了一种模型预测控制器(Model Predictive Controller,MPC)对传动系统进行主动减振[6-8]。还有研究分析了传动系统扭转振动过程中共振固有频率的特性[9-10]。其目的是减小多动力源耦合传动系统中存在的扭转共振,保障车辆传动系统安全可靠运行。由于混合动力汽车传动系统集成了变速器、行星齿轮机构、驱动电机等复杂机构,工作状态更为复杂,振动和噪声问题更为突出,因此,研究多动力源耦合传动系统扭转共振控制方法具有重要的意义。
本文以某混合动力汽车多动力源耦合传动系统(丰田THS系统,采用两个电机,即MG1、MG2)作为研究对象,在不同工况(低速启动、匀速行驶、急加速和减速制动)下,建立传动系统中组件的共振固有频率模型和动力学模型架构,提出针对扭转振动引起的共振控制方法。
1 混合动力汽车传动系统的动力学模型
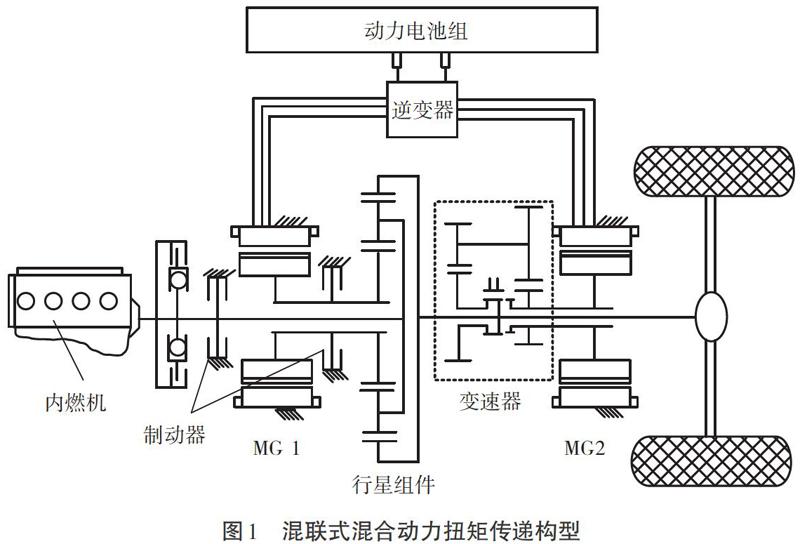
混合动力汽车传动系统动力源包括内燃机和驱动电机,从内燃机输出的扭矩经过扭转减振器,再进入行星组件,发电机MG1与行星组件中太阳轮相连,驱动电机MG2与固定速比的变速器输入轴连接。行星组件作为动力耦合装置,各传动路径上的扭矩进行耦合,其中,发电机MG1和驱动电机MG2都可对车辆进行驱动,发动机可以驱动车辆或带动发电机MG1进行发电,同时发电机MG1进行发电能够启动内燃机。根据混合动力车辆部件连接关系,建立混联式混合动力扭矩傳递构型,如图1所示。
整车动力部件参数均进行参数匹配设计,驱动电机MG2与动力电池的逆变器连接,车辆纯电动模式工况进行工作时,由驱动电机MG2带动固定速比变速箱,在驱动行星组件中,由行星架直接输出动力至车辆驱动半轴。
综合考虑传动部件的质量、布置形式等,根据集中质量法建立系统动力学方程,假设传动系统中各转动惯量均为刚性圆盘,各刚性圆盘之间由无质量扭簧阻尼器连接,刚度和阻尼均设置为扭转刚度和扭转阻尼。
以系统能量保持不变为原则,将传动部件简化为多自由度集中质量模型,建立相应动力学方程:
式中,[I]、[C]、[K]分别为传动系统中转动惯量矩阵、阻尼系数矩阵、刚度系数矩阵;[θ¨]、[θ]、[θ]分别为传动系统扭转角加速度向量、扭转角速度向量、扭转角位移向量;[M]为激励力矩向量。
建立传动系统无阻尼自由振动方程,忽略激励力矩矩阵向量与阻尼系数,即自由振动方程为:
假设传动系统自由振动第[i]阶固有频率为[ωi],其模态振型为[φi],那么扭振的角位移为:
经进一步计算,系数矩阵行列式为0,即
计算行列式,即可求解。
2 行星耦合器的动力学模型
根据驱动电机MG2-变速器-行星组件、内燃机-发电机MG1-行星组件不同传动路径上的连接关系和运动关系,建立整车传动系统各组件的无阻尼自由振动动力学方程,再建立整车传动系统的无阻尼自由振动矩阵。
由于动力耦合在行星组件,建立行星组件的拉格朗日算子,即
式中,[L]为拉格朗日算子;[I'c]为等效行星架转动惯量;[Ia]、[Is]、[Ir]分别为行星轮、太阳轮、齿圈的转动惯量;[θc]、[θs]、[θr]分别为行星架、太阳轮、齿圈的转速;[θacj]为第[j]个行星轮相对行星架转速,共有[n]个行星轮;[kar]、[ksa]分别为行星轮与齿圈齿轮副、太阳轮与行星齿轮齿轮副的平均啮合刚度;[Ra]、[Rs]、[Rr]为行星轮、太阳轮、齿圈的半径;[θacj]为第[j]个行星轮相对行星架的转角;[Rac]、[Rca]为行星轮和齿圈的平均半径;[θc]、[θs]、[θr]为行星架、太阳轮、齿圈的转角。
针对拉格朗日算子微分,即可计算各部件无阻尼动力学方程。
3 扭转共振控制方法
混合动力汽车动力性强,大功率、高转速车辆通常采用多个动力源的混合动力,且配备大功率柴油机、电动机和复杂的动力传动系统,在这一类车辆上,不同传动轴在传递扭矩时通常会出现频繁的共振频率点,而依靠回避“共振点”的方法通常难度大。
改变车辆行驶过程中动力源的工作状态,回避部件扭转耦合过程中扭振带来的共振问题,能够有效减少噪声和系统间的不稳定性,而扭转共振控制方法包括三步骤。
首先,建立不同挡位下不同传动路径下各零部件固有振动频率[f]的矩阵[A],其中,[n]为第[n]个挡位,[m]为第[m]个传动零部件。
然后,建立不同动力模式驱动下不同阶数扭振的谐振激励频率[ff]的矩阵[B],其中,[p]为第[p]种动力模式驱动,[k]为第[k]阶谐振激励频率。
最后,在第[x]种挡位,第[i]种动力模式驱动下的第[j]阶扭振的谐振激励频率[ffij],若满足式(8)条件,[[fx-δ,fx+δ]]为能够引起共振的上下边界频率,且[ffij]处于该区间,时间达到[Δt],则改变动力源工作状态;若满足式(9)条件,[[fx-δ,fx+δ]]为能够引起共振的上下边界频率,且[ffij]处于该区间,时间达到[Δt],则维持动力源工作状态。
由于车辆在不同挡位下的动力输出至不同传动路径,而为了更好地识别不同挡位针对不同传动路径的固有频率,先统计不同传动路径的固有频率数值,后针对该传动路径下的固有频率进行分解。
在油电混合两种动力源驱动的车辆中,在电机单独驱动下,当扭转振动的1、2、3、4次谐振激励频率范围接近传动系统固有频率时,[δ]取值介于1~100 Hz,当接近1~5 Hz时,启动内燃机,从而改变工作模式,有效避开共振点。若油电混合动力同时驱动车辆,则当扭转振动的1、2、3、4次谐振激励频率范围接近传动系统固有频率时,停止其中之一动力源的输出,从而改变振动频率,有效避开共振点。
4 结论
通过分析混合动力汽车动力传递构型,本文研究了如何减小多动力源耦合传动系统中存在的扭转共振,保障车辆动力传动系统安全可靠运行。混合动力汽车传动系统集成了变速器、行星齿轮机构、驱动电机等复杂机构,工作状态更为复杂,振动和噪声更为突出。基于此,笔者提出了一种针对混合动力汽车的扭转共振控制方法,通过比较工作状态下扭振是否落入各零部件固有振动频率范围来控制动力源转速和动力源状态,其比较有效地降低传动系统扭转共振发生的次数,未来要进一步在更多数据情况下研究模型预测的准确性。总之,如何测量和分解混合动力系统不同部件引起的共振固有频率,构建扭转共振检测模型和系统,是进一步研究的方向。
参考文献:
[1]黄海瑞.行星混联式混合动力客车传动系扭振特性分析与仿真研究[D].长春:吉林大学,2019:22-24.
[2]于福康.CVT混合动力汽车传动系统扭振分析与控制[D].长春:吉林大学,2019:18-19.
[3]钟必清,侯之超,赵韩,等.混合动力汽车传动系扭振力学参数的试验获取方法[J].清华大学学报(自然科学版),2019(6):482-489.
[4]孟德建,陈文龙,张立军,等.典型工况与工作模式下混联式混合传动系统振动分析[J].同济大学学报(自然科学版),2018(9):1270-1280.
[5]韩清振.混合动力传动系统复杂动力学行为及其稳定性分析[D].镇江:江苏大学,2018:15-16.
[6]Vadamalu R S,Beidl C.MPC for Active Torsional Vibration Reduction of Hybrid Electric Powertrains[J].IFAC PapersOnLine,2016(11):756-761.
[7]Vadamalu R S,Beidl C.Adaptive Internal Model-based Harmonic Control for Active Torsional Vibration Reduction[J].IEEE Transactions on Industrial Electronics,2019(99):1.
[8]Najafzadeh M,Adeli M M,Zarezadeh E,et al.Torsional vibration of the porous nanotube with an arbitrary cross-section based on couple stress theory under magnetic field[J].Mechanics Based Design of Structures and Machines,2020(6):1-15.
[9]夏煬志强,秦大同.基于低耗齿轮的大速比行星齿轮传动固有特性及振动分析[J].振动与冲击,2018(2):242-247.
[10]蔡敢为,黄院星,黄逸哲,等.弯扭耦合共振式振动时效的参激稳定性分析[J].振动与冲击,2018(20):101-108.
猜你喜欢
商业会计(2016年13期)2016-10-20
科技视界(2016年21期)2016-10-17
商(2016年27期)2016-10-17
科学与财富(2016年28期)2016-10-14
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
