
透射共轴式光声消化内窥成像系统
2020-03-07 02:02:00王柏权陈宁波张建辉龚小竞
光学精密工程 2020年1期
王柏权,陈宁波,张建辉,龚小竞*
(1. 中国科学院 深圳先进技术研究院 生物医学光学与分子影像研究室,广东 深圳 518055;2. 广州大学 机械与电气工程学院,广东 广州 510006)
1 引 言
随着社会发展,人们生活节奏加快、压力剧增,再加饮食不当、缺乏锻炼等因素,使得消化道系统的癌症发病率呈快速增长趋势,位居我国癌症发病率前列。研究表明,早期发现癌症病变有利于提高患者的生存率,对预防癌症恶化具有重大意义[1-2]。病理学研究表明,恶性肿瘤的发生、发展通常伴随着滋养血管的新生。滋养血管是为肿瘤提供养分的重要渠道,也是肿瘤扩散转移的主要路径,其生成及发展是判断癌症病变的重要指标[3-4]。因此,通过对新生滋养血管的敏锐成像有望帮助人们早期发现肿瘤。
消化道内窥镜能帮助医生直观地观察消化道内部病灶区的形貌变化,进而实现微创手术的引导,是目前临床进行消化道疾病诊疗的最主要工具,也是临床诊断消化道癌症的重要手段之一。基于不同的成像原理,消化道内窥镜可以分为光学内窥镜和声学内窥镜。在光学内窥镜中,白光内窥镜只能对消化道内表面进行常规的平面光学成像,特异性不足,对微小病灶的识别需依赖医生的经验[5-6];荧光内窥镜利用生物体自体荧光或外源荧光标记,可对目标组织进行靶向成像,特异性得到明显增强[7-8];窄带光成像利用窄带光源代替传统的宽带光源,能够明显提高消化道黏膜及黏膜下血管成像的对比度与清晰度[9-10];光学相干层析(Optical Coherence Tomography,OCT)内窥镜具有三维成像能力,可以对黏膜下1~2 mm左右深度的微小病变进行探测[11-13],并且具备较高的分辨率(~10 μm)。虽然以上基于光学的内窥成像技术的成像对比度高,但是均面临组织对光强散射的影响,因此,成像深度浅,无法探测深处病灶,极大地局限了疾病诊断能力。与之不同,组织对声波具有明显低的散射效应,超声内窥镜相对光学内窥镜可以获取更大深度(数毫米到数厘米)的成像信息。但是相对较低的对比度和特异性,使它难以提供肿瘤早期诊断所需要的敏锐度[14-16]。因此,现有临床内窥镜还无法获得大深度、高对比、高特异性的成像结果,很难为肿瘤的早期诊断提供有力的支持。
光声成像技术是一种基于光声效应的新型生物医学成像技术。光声效应是指脉冲激光照射生物组织,组织吸收光能后,会因瞬时热弹效应产生超声波(即光声信号)的现象。通过超声换能器探测该信号可以获取组织的光吸收特性,并进行成像。该技术兼具光学成像高对比度与超声成像大探测深度的优点,在生物组织结构与功能成像等方面展现出独到之处[17-18]。在肿瘤成像应用中,光声成像技术既能对肿瘤周边血管网络结构成像,又能实现血氧饱和度的功能性成像,因此有望通过对病灶区新生滋养血管的敏锐成像来精准识别消化道恶性肿瘤[19-21]。
目前,国际上具有代表性的光声内窥成像技术研究团队主要包括美国加州理工大学Lihong V. Wang课题组[22-23]、普渡大学Ji-xin Cheng课题组[24-26],中国华南师范大学邢达课题组[27-29]和中国科学院深圳先进技术研究院宋亮课题组[30-31]等。这些课题组已经研发了多种光声内窥成像系统,成功实现了活体状态下小动物消化道的光声内窥成像[22,30]。在已研发的光声内窥系统中,成像方式皆为反射式,即光激发与声探测皆在组织的同一侧(成像探头内)。其成像探头最常采用的是光声非共轴方式[29-31]。其光学镜组构成简单并采用常规微型超声换能器,通过倾斜光束或者声束,使光学激发区和超声探测区在深度方向上重叠,形成光-声耦合。其优点是结构和拼装工艺相对简单,但是该方式使光-声耦合重叠区域有限,不仅成像深度有限,且在重叠区域内信号强度也会因为重叠的范围不同发生变化。而共轴设计不仅可以获得理论上无限大的光声重叠区域,大幅增加成像区域,同时光声共轴也能提高光-声耦合效率,理论上可以增大信号强度。和光声显微成像类似,在反射内窥成像系统中也可以实现共轴设计。一种是将激发光通过中空式微型超声换能器,实现光声共轴,该设计虽然结构相对简单,但是中空式设计会损失超声信号的探测效率,影响最终的系统信号强度[22,27,32-33]。例如,国外Lihong V. Wang课题组利用该方法设计了应用于兔子食道的光声内窥镜,非散射情况下最大成像深度达7 mm[32]。国内邢达课题组在此基础上结合了贝塞尔光的特性设计一种消化道内窥硬镜,其最大成像深度达13.8 mm[33]。另一种是利用反光透声或透光反声的特殊镜组,使激发光光束与超声声束同轴[25-26],这种方法的问题在于不仅探头的内部结构相对复杂,对精确拼装的要求很高,同时由于镜组的反射面过多,不可避免带来光、声能量的衰减,从而降低系统的成像性能。因此,反射共轴式的内窥设计受到了诸多限制,没有得到充分的发展。
目前,国际上已有课题组提出生物体内光激发、外部声探测的透射式光声成像构想。美国杜克大学Junjie Yao课题组利用透射式光声计算层析成像技术证明了该构想的可行性[34]。国内福建师范大学李晖课题组也将透射式光声成像技术应用于胃癌疾病的探测[35]。但是上述研究均未完整讨论和对比传统反射非共轴式和透射共轴式的区别。
综上所述,面向消化道内窥成像的临床应用,现有的反射式光声消化内窥成像系统存在系统信号强度低、成像深度不足,或结构复杂、探测效率低等缺点。因此,本文提出了一种透射共轴式(下文简称透射式)光声消化内窥成像系统的实现方案,即采用消化道腔道内光激发、体外声探测的光-声耦合方式。本文通过仿体与离体生物组织光声成像实验,与常用的反射非共轴式(下文简称反射式)光声消化内窥成像系统进行了对比,实验结果表明本系统大幅提高了系统的信噪比与成像深度,在消化道内窥成像中具有巨大的应用潜力。
2 系统原理与设计
2.1 反射式、透射式的光-声耦合原理
反射式光-声耦合设计如图1(a)所示,脉冲激光经光纤、渐变折射率透镜后由棱镜反射到组织内部,同侧的超声换能器接收组织产生的光声信号。此时光传播路径与声传播路径处于非共轴,系统只能接收到光声重合区域的光声信号,而超出光声重合区的光声信号则无法被探测,这导致系统存在一个最佳成像区域(光-声中心重合区)。当偏离光-声中心重合区时其接收信号区域的减小,导致光声信号随之降低;当超出光声重合区时,光声信号则无法被探测,导致系统成像深度不足。
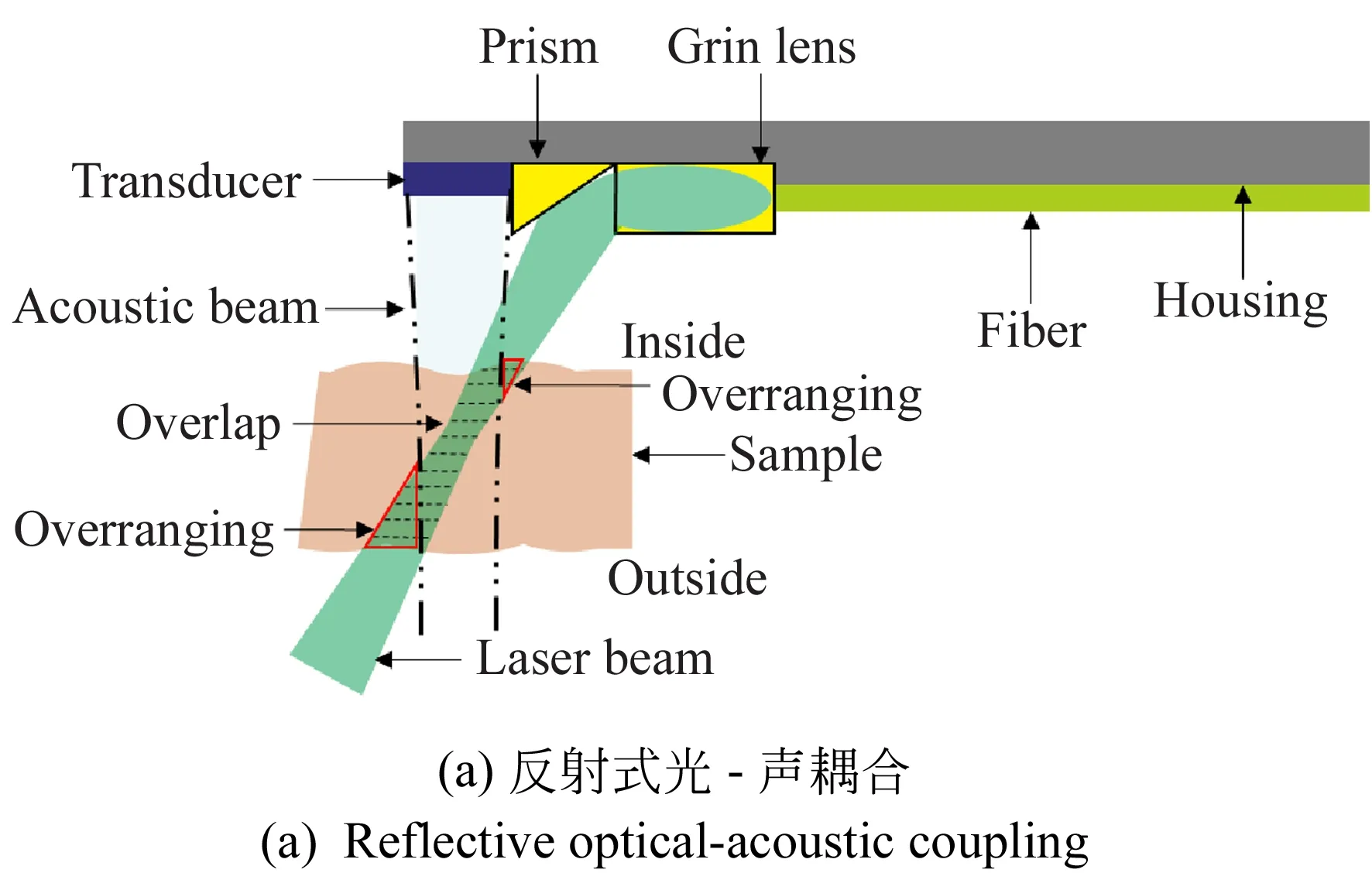
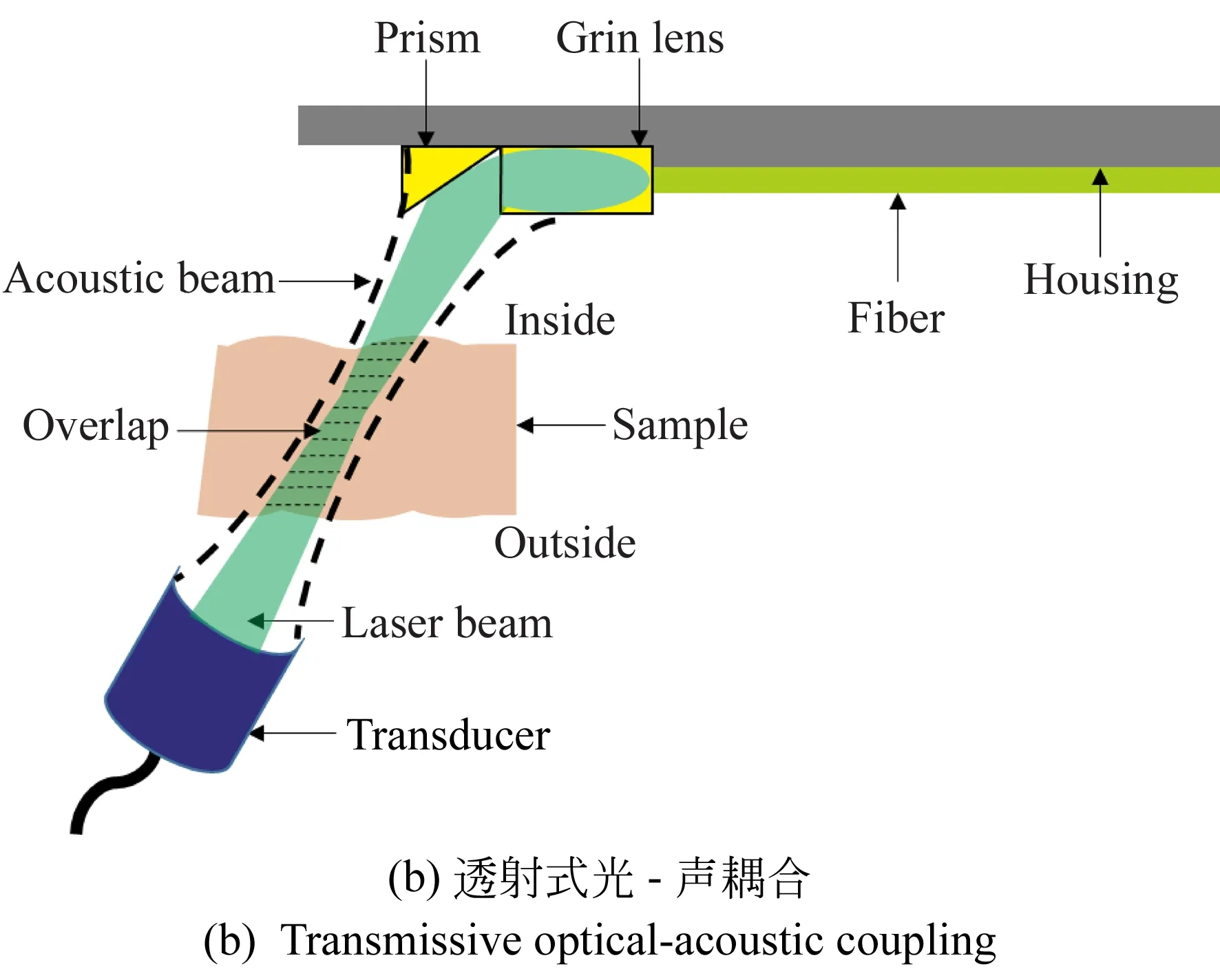
图1 反射式、透射式系统的光-声耦合模拟
图1(b)表示透射式光-声耦合方式。相比反射式设计,该方案将超声换能器外置,与内窥探头相互独立。对光-声空间位置进行自由调节,从而实现光声共轴,因此可以实现更大深度范围上的光声耦合,理论上系统相比反射式增大了成像深度并且在更大的成像范围里保持良好的信噪比。
2.2 光声消化内窥成像系统的设计与搭建
透射式光声消化内窥成像系统由内窥成像探头、光源、信号采集和运动控制等部分组成,如图2所示。为了保证光激发的一致性,同时也为了方便实验对比,透射式的光激发直接利用了本实验室前期研发的反射式内窥探头(其设计详见文献[30]),即通过反射式内窥探头将激发光照射到样品,然后外部的超声换能器1和内窥探头中的超声换能器2同时采集信号。系统的主要器件如下:光源为高重频可调谐脉冲激光器(NT242,EKSPLA),激光器的重复频率为1 kHz,通过透镜组和光纤耦合器将激光耦合进入光纤并传输到探头;超声换能器1(V376,OLYMPUS),用于透射式系统中光声信号探测,中心频率为30 MHz;超声换能器2(0.6×0.5×0.2 mm,定制,BLATEK)用于反射式探头中光声信号探测,中心频率为40 MHz;信号采集时,信号被超声收发仪(5073PR,OLYMPUS)接收并放大39 dB,最后由数据采集卡(9325,ALAZAR)实现采集及存储,数据采集卡的采样率为250 MS/s;运动控制部分包括:直流稳压电源(PS-305D,DAZHENG)为电机驱动器(DM442,LEADSHINE)提供电源,进而驱动电机运动,最后由旋转电机(J-3518HB2401,上海正吉)带动离体样品旋转运动。
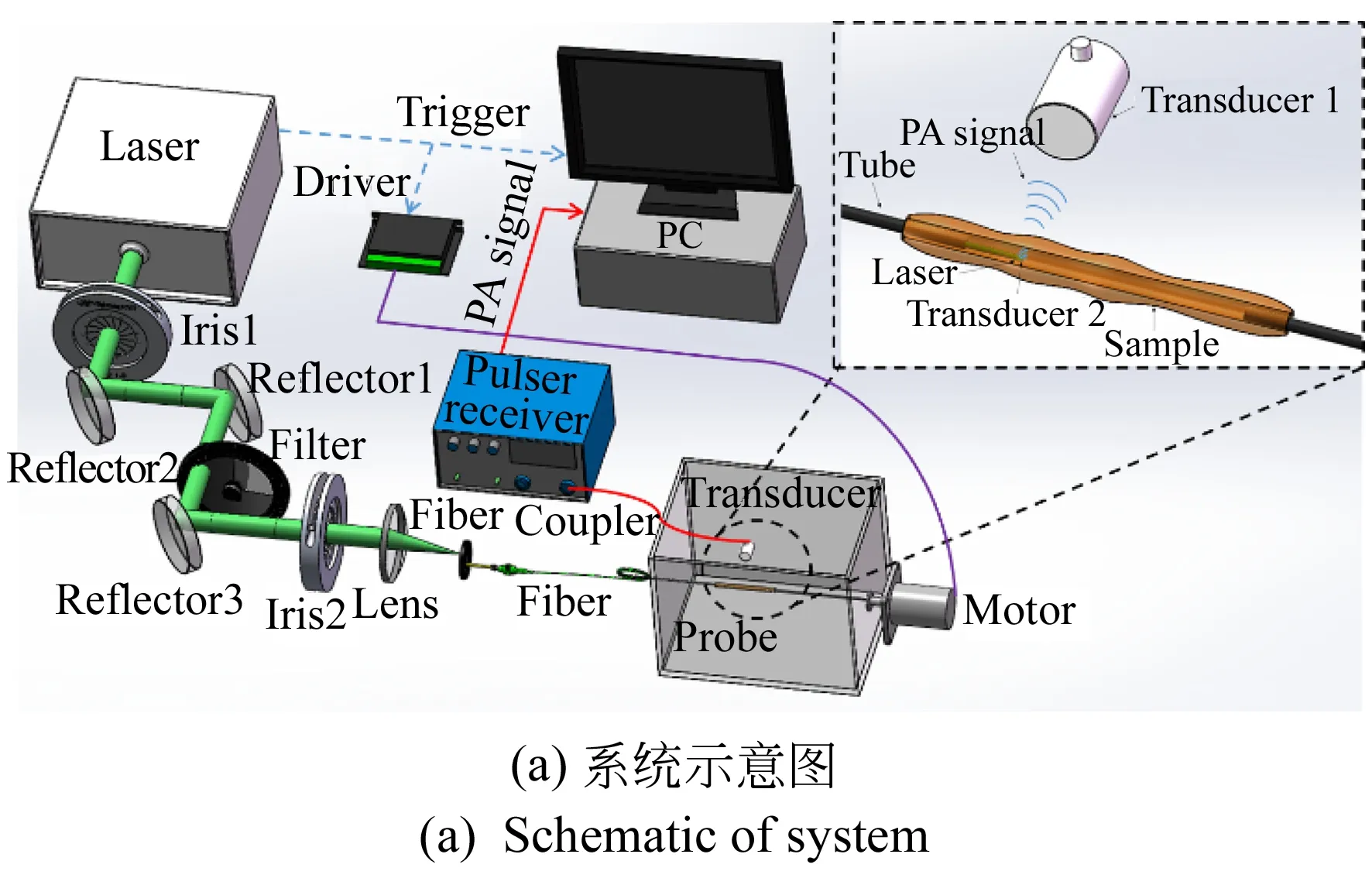
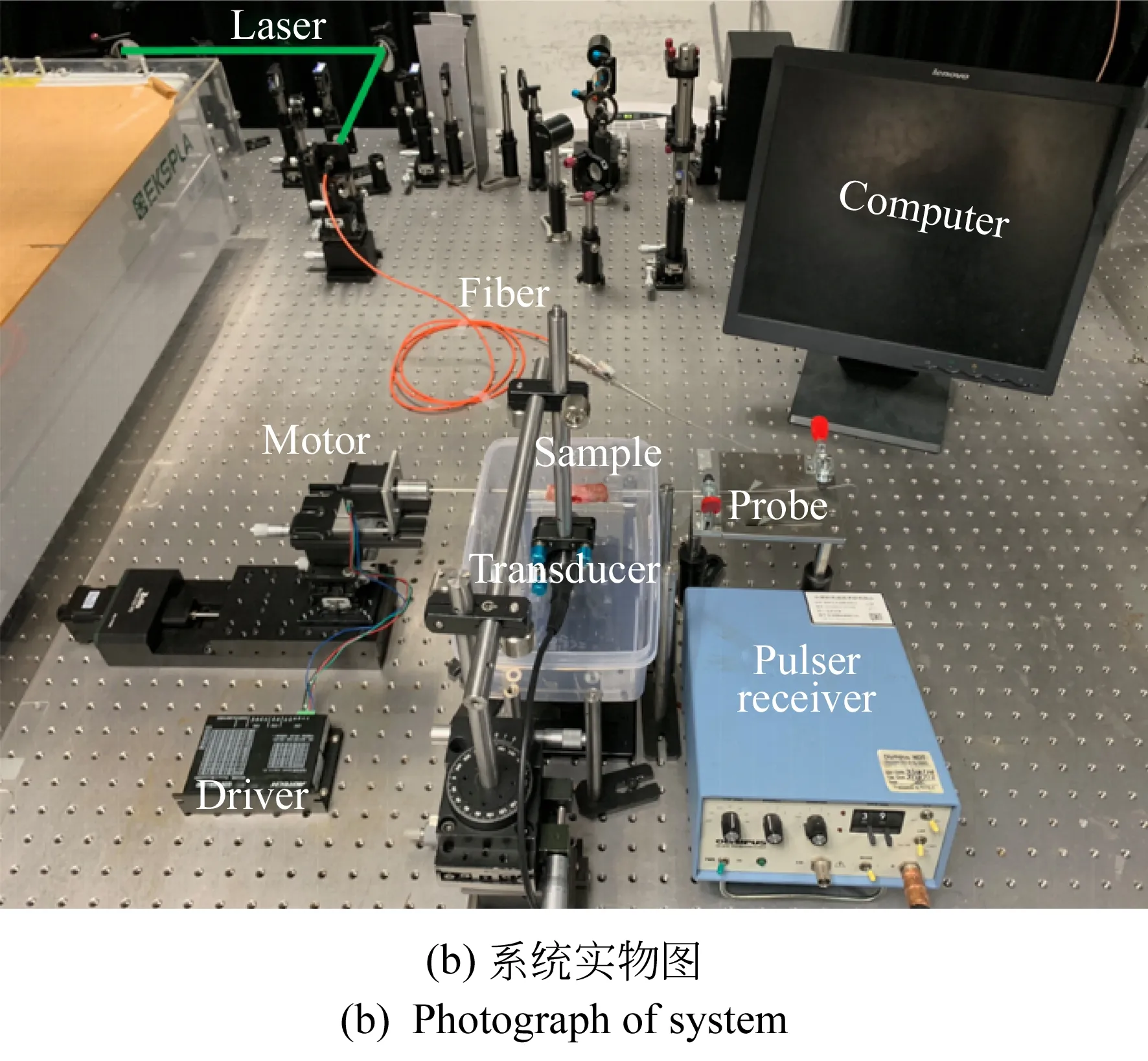
图2 透射共轴式光声消化内窥成像系统
实验中,光声探头、样品、超声换能器均浸没水中,保证光声信号良好耦合。仿体样品分别为无散射子的透明琼脂(1%浓度的琼脂粉,Agar)和加有散射子(1%脂肪乳注射液,Intralipid)的浑浊琼脂,其衰减散射系数为14 cm-1[36],并在仿体样品中不同深度放置黑胶带作为吸收体。离体生物组织为内径约20 mm的离体猪小肠。
3 成像实验与结果分析
3.1 在激发光不受散射的情况下,透射式与反射式成像对比实验
本研究首先比较透射式、反射式两类内窥成像系统在不受散射介质影响情况下的成像能力,对透明琼脂中的黑胶带进行光声成像。扫描过程中,光声探头与超声换能器保持静止,移动样品,在能量为15 μJ的532 nm光激发下,对每条黑胶带单点位置同时进行反射式与透射式光声成像,每条黑胶带上采集80次光声信号,并每8次数据平均一次,沿水平方向扫描35 mm,获得560条A-Lines,并组成一个B-Scan,成像时间约为0.56 s。最后每条黑胶带的光声信号由10条A-Lines组成。其仿体实物图、成像结果与系统信噪比如图3所示。
图3(a)为仿体实物图。图3(b)和3(c)分别表示在激发光不受散射的情况下,仿体的反射式与透射式光声成像结果,其纵坐标代表着黑胶带距离激发光处的距离。虚线上方为黑胶带的光声信号,下方为仿体-换能器界面、换能器内部延时块界面对原信号的反射信号。
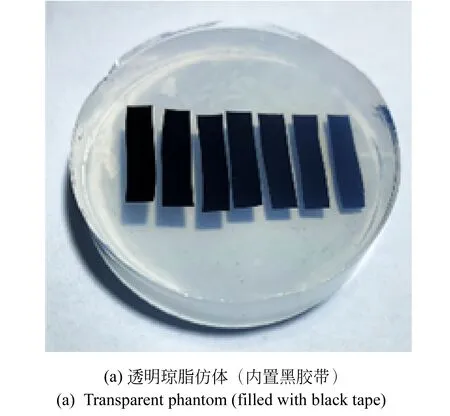
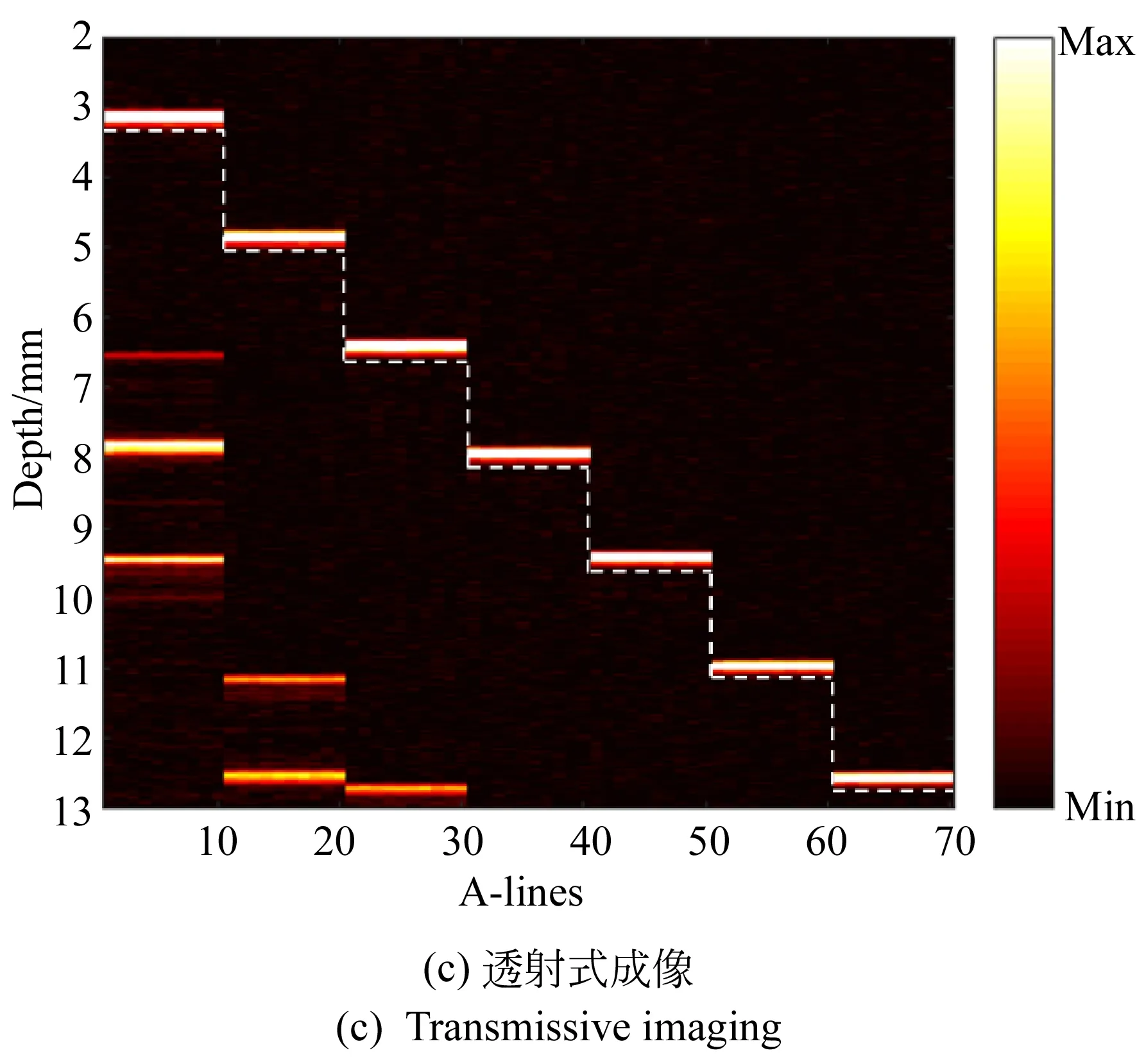
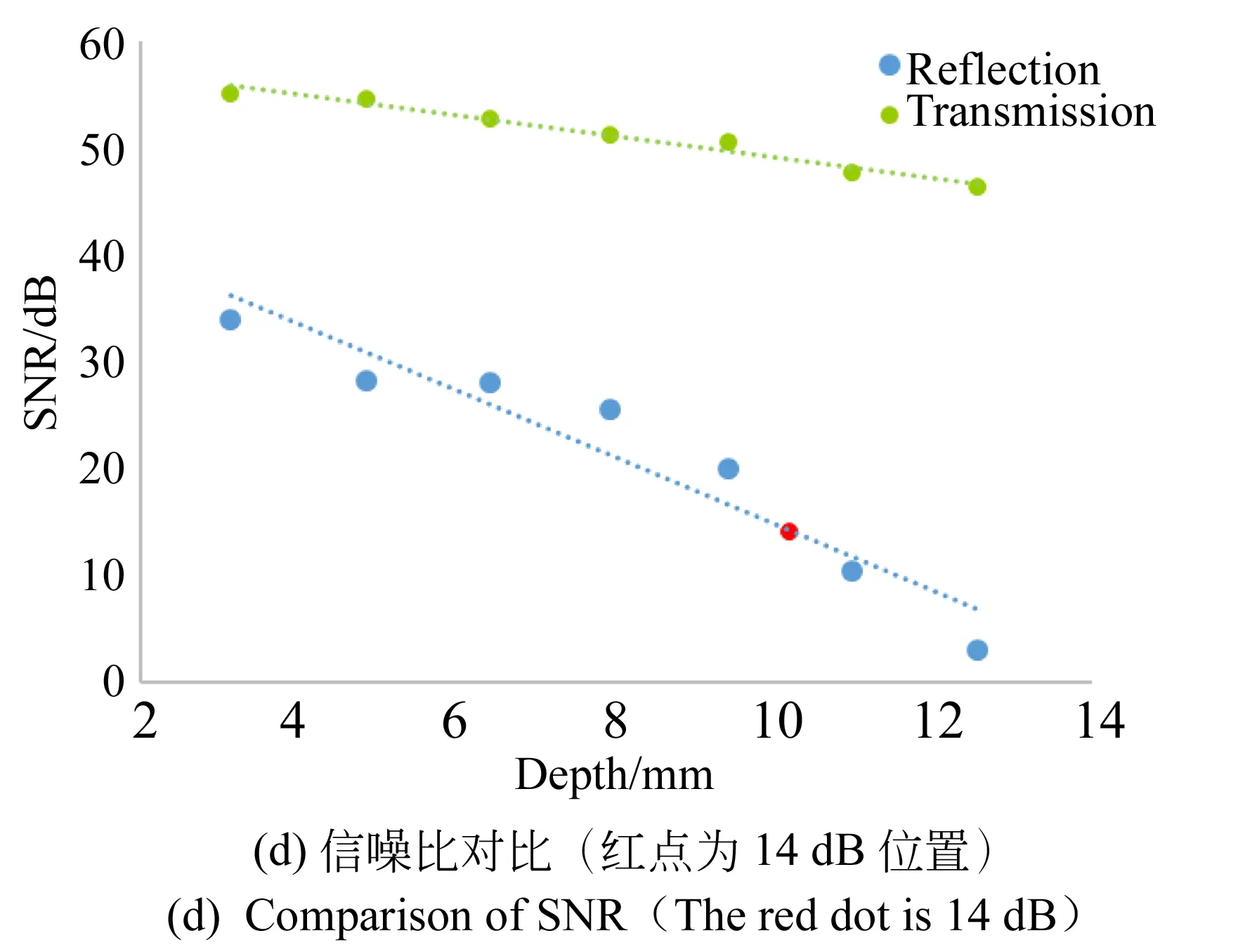
图3 在激发光不受散射的情况下系统信噪比对比
对图3(b)和3(c)中的结果进行信噪比的定量分析,结果如图3(d)所示(彩图见期刊电子版),其横坐标代表黑胶带与激发光的距离。首先取图中各条黑胶带的信号均值作为信号值,然后取背景信号标准差的均值作为噪声值,代入公式(1)中,求得各条黑胶带对应的图像信噪比。
(1)
由图3(d)可知,反射式系统的最佳成像位置在3.1 mm附近,此时系统的信噪比达到最大值33.9 dB;而同样在3.1 mm处,透射式系统信噪比高达55.0 dB,相对反射式系统提高21.1 dB。同时对比图3(d)中透射式与反射式系统的信噪比趋势可知,在相同成像深度上透射式系统的信噪比均比反射式的高,最大差距可达43.3 dB。
虽然理论上SNR大于1时,都可以认为是有效信号。但实际成像时,除了系统固有噪声,往往会有其他不可预见的干扰,同时考虑人眼的敏感度,通常将SNR为5即14 dB认为是成像极限,低于此则认为是无效成像。由此分析图3(d)可知,反射式系统成像信噪比为14 dB时(对应红点位置),对应深度约为10.2 mm,可将此深度定义为该系统的成像深度;而透射式系统成像在本实验的最深处,即12.6 mm处,系统信噪比仍有46.3 dB,其成像深度远大于反射式系统。
综上所述,在激发光不受散射的情况下,透射式光声消化内窥成像系统相比反射式系统展现出更高的系统信噪比与更大的成像深度。
3.2 在激发光受到散射的情况下,透射式与反射式成像对比实验
在实际生物组织成像中,光束会受到组织的散射影响。为了评估两类内窥成像系统在受散射情况下的成像能力,将5条黑胶带以不同深度放置于有散射子的浑浊琼脂中,对它进行光声成像实验,图4(a)为仿体实物图。
该实验条件、数据处理环节与实验一保持一致,其仿体实物图、成像结果与系统信噪比如图4所示。图4(b)和4(c)分别表示在激发光受散射情况下,仿体的光声成像结果。图4(d)表示在激发光受到散射的情况下,两类成像系统的信噪比。可以看出,当反射式系统成像位置约为3.3 mm处,此时系统的信噪比达到最大值30.0 dB。相同位置处,透射式系统的最大信噪比可达52.0 dB,相对反射式系统提高22.0 dB。同时对比图3(d)与图4(d)中的信噪比可得,在激发光受到散射影响的情况下,两类系统的信噪比相比激发光不受散射的情况时皆有下降,但是在相同成像深度上透射式系统的信噪比均比反射式的高。
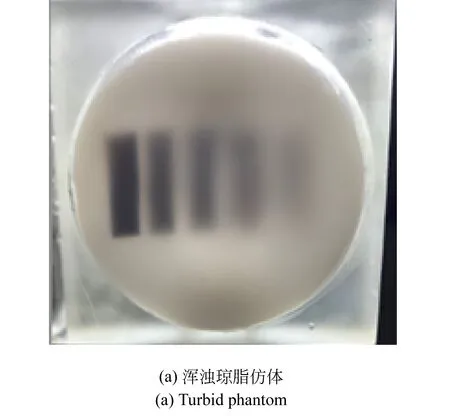
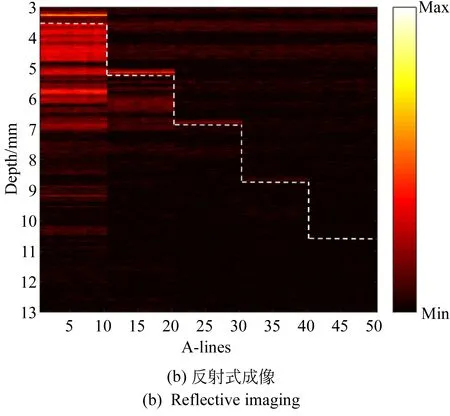
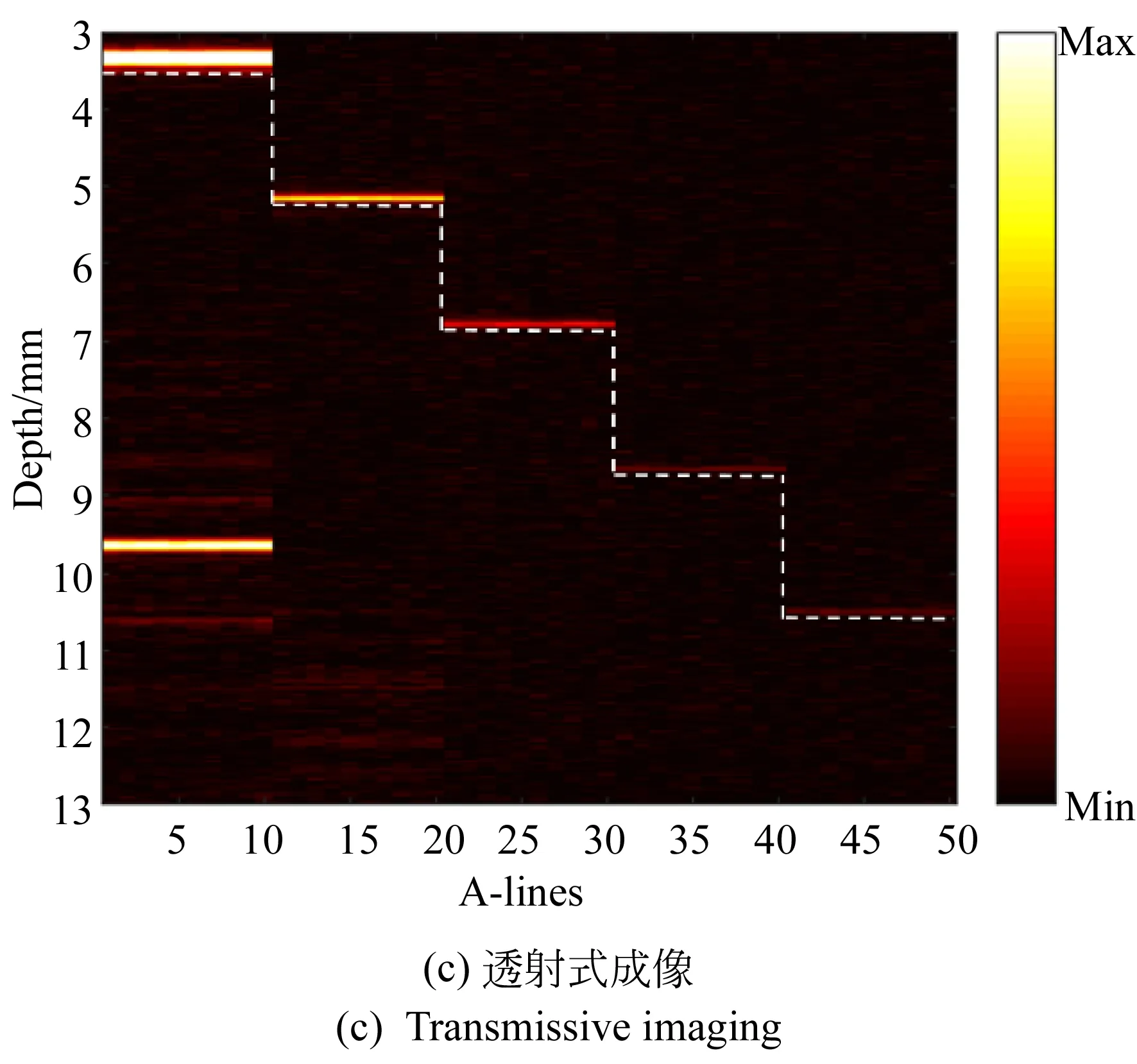
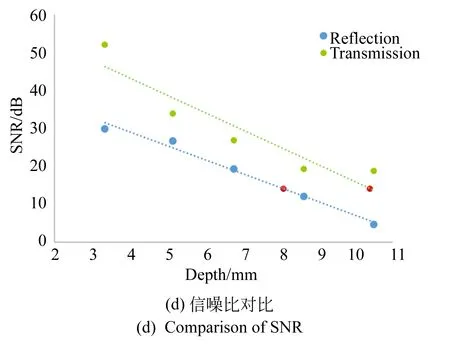
图4 在激发光受到散射的情况下系统信噪比对比
在激发光受到散射的情况下,反射式系统的成像深度约为8.1 mm(14 dB处),而透射式系统的成像深度约为10.4 mm,其成像深度比反射式系统增加约28.4%,因此它具备更大的成像深度。
综上所述,在激发光受到散射影响的情况下,透射式光声消化内窥成像系统仍能达到比反射式更高的系统信噪比和更大的成像深度,为临床光声内窥技术实现大深度成像提供了借鉴。
3.3 离体生物组织成像对比实验
为了评估两类光声内窥成像系统对生物体消化道的实际成像性能,本文对离体生物消化道进行了光声内窥成像实验。实验样品为离体的猪小肠,其肠道直径约为20 mm,从其外表皮注入浓度为30 mg/mL的洋红染料模拟肠道血管。图5(a)为肠道外部实物图,图5(b)为实验后的肠道内部展开图。
如图2(b)所示,实验中光声探头静止置于猪小肠内部,控制样品旋转,系统沿图5中的虚线位置扫描肠壁,扫描一圈(360°,2000A-lines)需2 s,其内窥图像如图6所示。激光出射能量约为30 μJ。

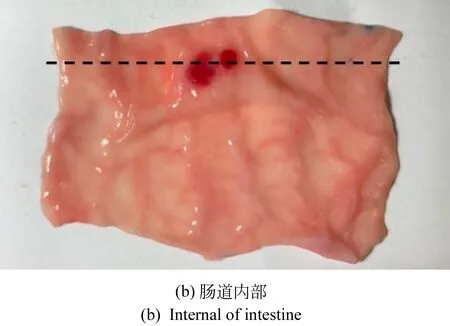
图5 猪小肠实物(虚线处为成像截面)
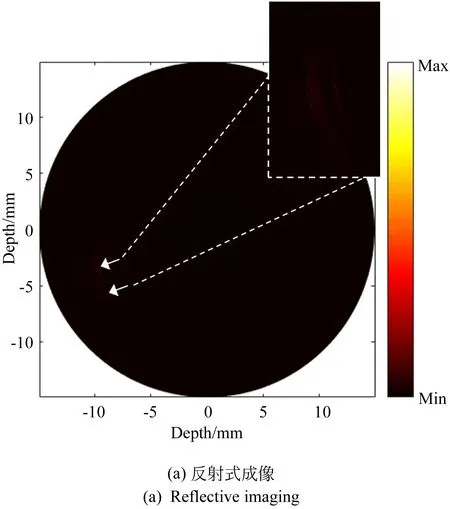
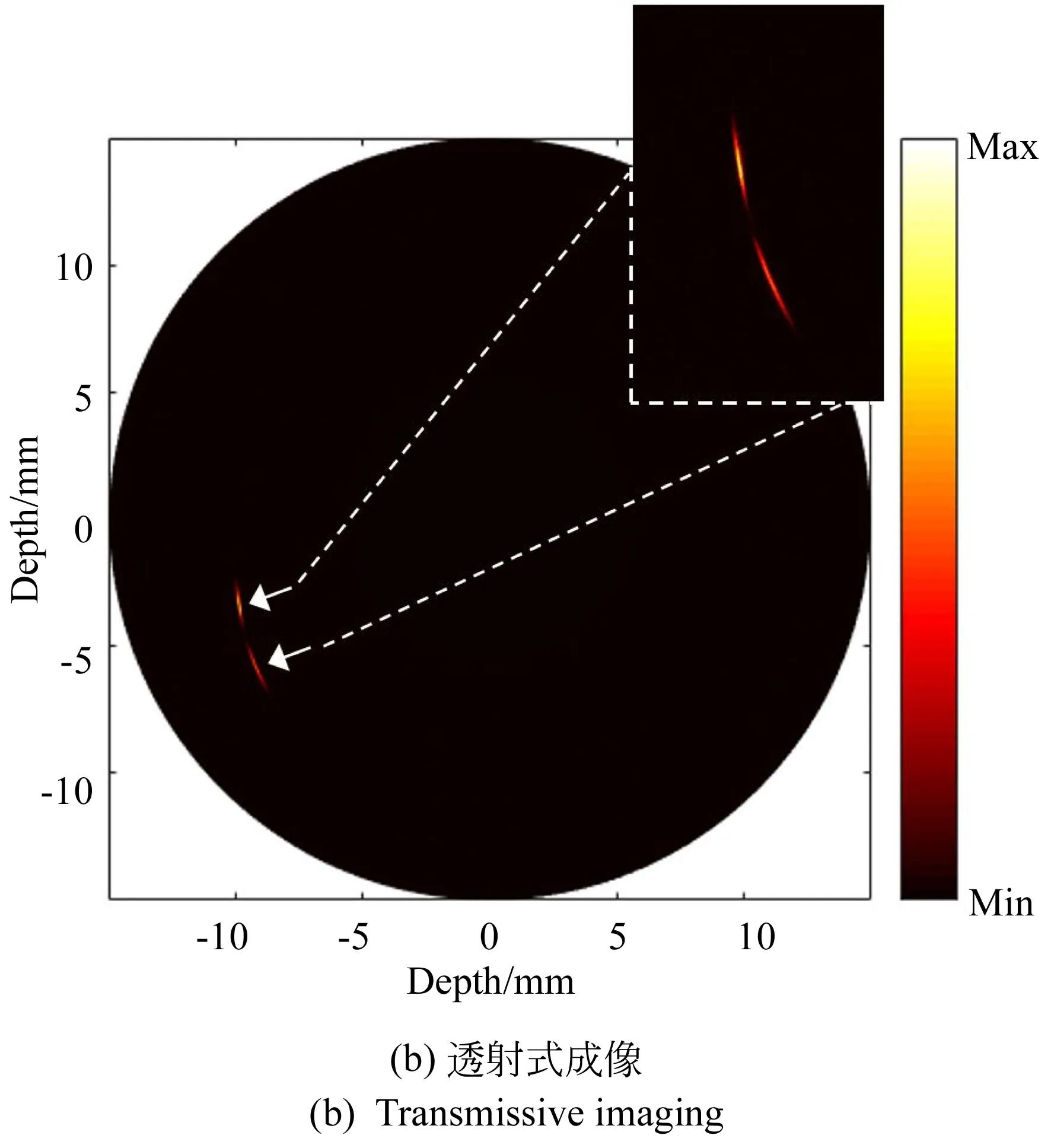
图6 猪小肠光声内窥成像
图6(a)和6(b)中箭头所指处分别表示反射式、透射式内窥成像系统的光声成像结果。对图中箭头所指处的信噪比进行定量分析可知,在10.7 mm的成像深度处,反射式系统的成像信噪比为12.4 dB,透射式系统的成像信噪比为22.1 dB,比反射式系统提高9.7 dB。从实际成像效果也可以看出,透射式系统的成像结果能更清楚地表征成像对象的形态特征,而反射式系统几乎无法看清成像对象的形态。离体成像结果表明,透射式系统相比反射式在大深度上能获得对比度更高的图像信息,进一步凸显了透射共轴式光声消化内窥成像系统面向临床消化道大深度内窥成像的应用潜力。
3.4 空间分辨率理论计算与光、声分布模拟
系统光学部分设计与本实验室的前期研发一致,未受散射时,在2.7 mm处可获得的最小光斑约为255.1 μm[30]。透射式超声换能器的声斑计算约为132.5 μm。所以,系统的空间分辨率主要取决于声学分辨率,透射式超声换能器的横、纵向分辨率的理论计算如下[17]:
(2)
其中:RL为横向分辨率,波长λ=51.3×10-3mm,超声换能器焦距F=31.75 mm,超声换能器的表面直径D=31.75 mm。
(3)
其中:Ra为纵向分辨率,声速c=1 540 m·s-1,超声换能器带宽Δf=40 MHz。
因为,透射式超声换能器始终保持聚焦于组织光激发的表面,所以此处的声斑大小约为0.13 mm。另外,已知反射式超声换能器的近场距离为1.62 mm,远场半扩散角约为8.7°。仿体成像时,超声换能器距离样品约3 mm,处于远场,其声斑在仿体表面处的大小约为0.34 mm;而猪小肠内窥成像时探头距离组织内部表面约10.7 mm,此时组织表面声斑约为3.09 mm。同时,反射式系统光-声非共轴,呈20°夹角,所以在仿体近距离成像与猪小肠远距离内窥成像时,声束入射散射介质中的起始点发生偏移。
根据计算结果,结合不同角度的声束(虚线标记),对光在仿体、离体生物组织内部的分布情况进行模拟。模拟参数设置如下:532 nm下,2%浓度Intralipid吸收系数μa=0.057 mm-1,散射系数μs=5.37 mm-1,散射各向异性指数g=0.631[37];500 nm下,消化道组织吸收系数μa=2.07 mm-1,散射系数μs=44.1 mm-1,散射各向异性指数g=0.439[38]。图7表示两类系统的光束与声束在仿体、生物组织中的分布情况,纵坐标表示散射介质的厚度。
模拟结果表明,在散射介质中(尤其是大尺寸的消化道内),从深度方向看,透射式比反射式的光声重合区域更大,在声束横截面上(即换能器探测范围内)非共轴光-声重合范围迅速减小,这也造成了相同光照条件下,光声信号快速下降。此外,透射共轴时,在声束横截面上的光强分布是均匀的,而非共轴时其光强分布不均匀。因此,透射共轴的设计对确定不同深度的激发光强,进而准确反演组织吸收更有意义。

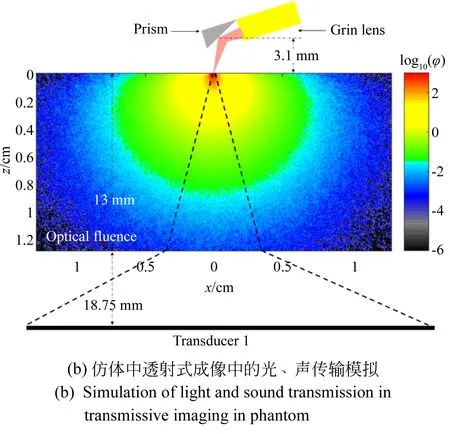
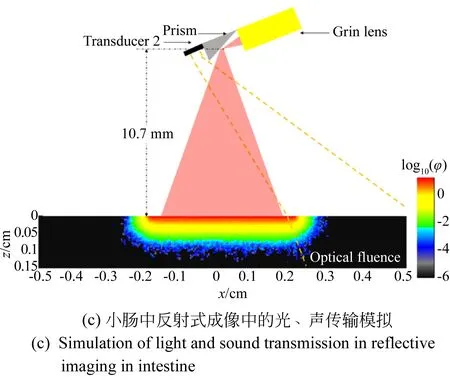
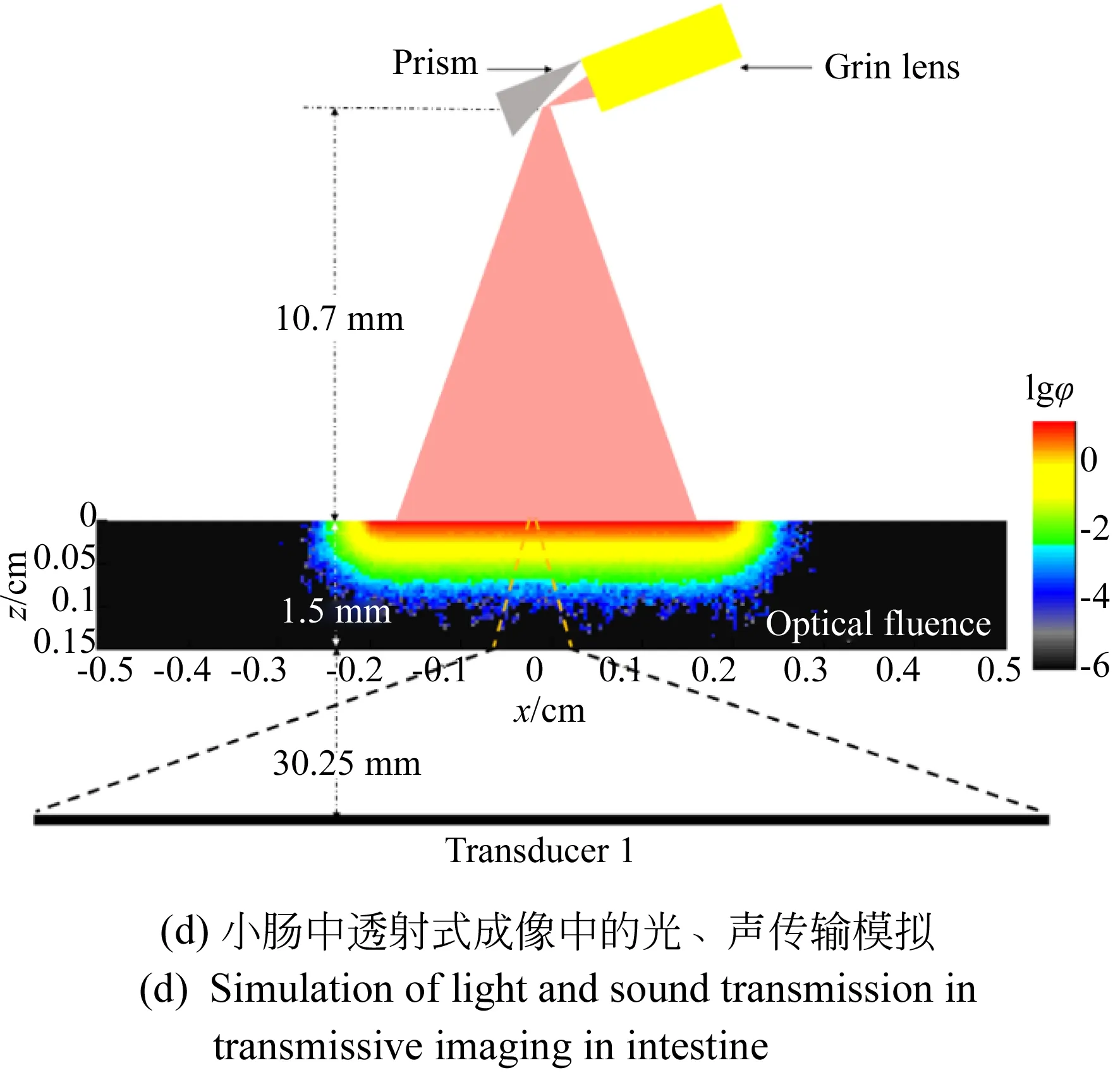
图7 光与声在散射介质中的分布模拟
4 结 论
本文为了提高光声消化内窥成像系统的信噪比与成像深度,设计了一种内部光激发、外部声探测的透射共轴式光声消化内窥成像系统,并在仿体与离体样品上,与反射非共轴式系统同时进行了成像实验,并对二者的信噪比、成像深度以及光-声在散射介质中的分布情况进行了研究。在仿体样本实验中可以看出,不论激发光是否受到散射影响,透射共轴的系统在相同深度下的信噪比或最大成像深度都远大于反射非共轴的系统。信噪比最大差距可达43.3 dB,成像深度增加约28.4%。在离体猪小肠腔道内进行的内窥成像实验表明,在10.7 mm成像深度处,透射式系统的信噪比为22.1 dB,比反射式系统提高9.7 dB,能更有效地获取病灶区的信息。最后,结合样品特性、不同角度的声束,模拟了光在散射仿体与生物组织的光分布情况,明确了光-声共轴使得透射式比反射式的光声重合区域在深度方向上范围更大;同时,从深度方向看,在声束横截面上(即换能器探测范围内),非共轴设计使得光-声重合范围迅速减小,这也导致相同光照条件下,其光声信号快速下降;此外,同一深度处,光-声共轴使得声束横截面上的光强分布相对更均匀,有利于确定不同深度的激发光强,进而准确反演组织吸收特性。综上,仿体和离体样品的实验结果证明,透射式光声消化内窥成像系统相比反射式系统,可有效实现光声共轴,不仅避免了反射共轴探头中,通光率或超声探测效率下降的问题,并且改善了非共轴探头导致光声耦合区域不足的缺点,明显提高成像系统的信噪比与成像深度。
然而,该系统目前仍存在挑战。首先,活体成像时,需要精准定位内窥探头的位置,才能使光声实现共轴,因此需要开发相应的探测和对准方式,比如利用临床常用的X光或者超声引导。其次,为了减少病人诊断时的不适,需要提升系统成像速度,缩短成像时间。因此,未来的光声内窥系统可以通过提高光源的脉冲重复频率,或采用阵列式的超声换能器接收光声信号,来加速图像获取速度。另一方面,为了提升光声成像的敏锐度,需要针对实际的临床应用调节,进一步对激发光和声探测的各种参数,如激发光的能量、脉宽和波长、超声探测的频率、换能器尺寸等进行优化,使它满足大深度的人体消化道光声成像需求。
综上所述,本文设计的组织内部光激发、外部声探测的透射共轴式光声消化内窥成像系统具备优良的系统信噪比,可为面向临床消化道大深度成像需求提供新的解决思路。
猜你喜欢
锦绣·下旬刊(2021年11期)2021-10-12 09:54:22
中国电气工程学报(2020年2期)2020-07-28 10:17:04
科技视界(2019年20期)2019-08-29 02:57:44
北京航空航天大学学报(2018年1期)2018-04-20 06:38:10
北京航空航天大学学报(2017年7期)2017-11-24 05:27:08
北京航空航天大学学报(2017年10期)2017-04-20 08:51:25
物理实验(2017年2期)2017-03-21 07:20:41
中国光学(2015年5期)2015-12-09 09:00:23
物理实验(2015年8期)2015-02-28 17:36:42
生物医学工程学进展(2015年1期)2015-02-28 14:53:41
