
链路时延差对测控设备跟踪及解调性能影响分析
2020-03-04 06:00段庆光吴有杏魏连魁
无线电工程 2020年2期
段庆光,吴有杏,魏连魁
(中国卫星海上测控部,江苏 江阴 214431)
0 引言
无线电测控设备接收到卫星下行信号后,依次经过天线馈源、波导、场放、下变频器、滑环及开关矩阵等送至基带设备对信号进行分析处理,解调出相关数据及角误差信号,完成目标的数据处理及跟踪[1-2]。以航天测量船S频段统一测控系统为例,为了达到最大的使用效益,该系统具备标准TT&C、扩频TT&C、调频及测控数传一体化等多种测控体制,通过加载不同的软、硬件实现多种测控体制同时或分时工作,系统包括了较多的场放、下变频器和基带设备,并使用开关矩阵完成链路的灵活配置。理想情况下,不论链路中各器件如何交叉使用,下行信号通过各器件及传输线缆后应同时到达基带设备[3]。但是,由于器件性能的差异及传输路径不同,卫星下行信号经过不同链路传输至基带设备,链路时延必然存在差异,时延差异较大时,将影响相关数据的解调,严重时导致无法稳定跟踪目标[4]。针对链路差异对载波信号的影响,以往常常通过对标校塔、施放信标球等方式标定出和、差链路相位,必要时进行相位修正,用来补偿和、差通道信号的传输时延,和通道送来的参考信号需要在标校的过程中通过相位校正单元进行相位修正,以保证本地参考信号信号差与和信号同频同相[5-6],但往往忽略了由于数据或伪码码率较高,链路时延差异会导致数据同步异常,从而影响对目标的正常跟踪[7]。
针对船载某测控设备在对塔标校及任务过程中,曾经出现的数传模式下对塔相位值不可用、分集合成负增益以及FM模式下无法稳定跟踪目标等异常现象,对实测数据进行了仿真分析,阐明了问题产生的原因,进而对不同测控体制下链路时延差异的影响进行了深入分析,提出了链路时延的测试方法及修正措施。
1 典型故障案例
1.1 下行数传模式
测量船某测控设备在码头对塔标校时,数传模式下进行校相精度检查,在单左旋、单右旋方式下,设备校相功能正常、校相数据可用、校相精度满足指标要求及跟踪正常,但在分集合成方式下出现如下异常现象:① 码率较低时差模环失锁;② 码率较高时分集合成校相结果无法用于单旋向跟踪,左旋相位值差异较大;③ 分集合成增益为负值。
通过分析排查及对左、右旋链路时延测试,发现在基带入口处左、右旋和路链路存在约84 ns时延差,将左、右旋和路信号时延调整一致后,上述异常现象均消失,时延调整前后测试结果如表1所示。
表1 时延差异影响测试数据
Tab.1 Data of affected by the delay inequalities
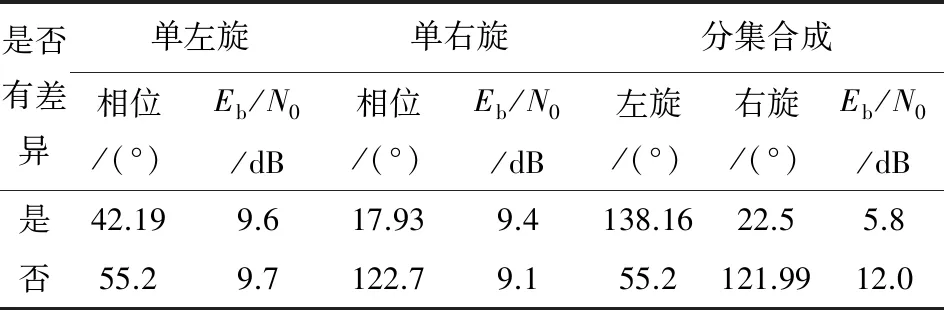
是否有差异单左旋单右旋分集合成相位/(°)Eb/N0/dB相位/(°)Eb/N0/dB左旋/(°)右旋/(°)Eb/N0/dB是42.199.617.939.4138.1622.55.8否55.29.7122.79.155.2121.9912.0
1.2 调频模式
链路时延差异主要影响调频模式分集合成效果,影响主要体现在2个方面:① 数据解调不稳定,情况恶劣时会大量丢帧;② 误差电压会变化剧烈,严重时无法正常跟踪。测量船某测控设备实测数据分析如图1所示,可以看出,合成信噪比明显低于单旋向信噪比,不仅没有达到应有的合成增益,反而比单旋向更差,导致设备无法稳定跟踪目标。通过对左、右旋时延测试,发现左、右旋和路存在约130 ns的时延差。图2为左、右旋时延差调整一致后实测数据分析,合成信噪比明显高于任一单旋向信噪比,且有效抑制了单旋向信号的突然衰落。左右旋时延差调整一致后的合成信噪比明显高于存在时延差异时的合成信噪比,如图3所示。
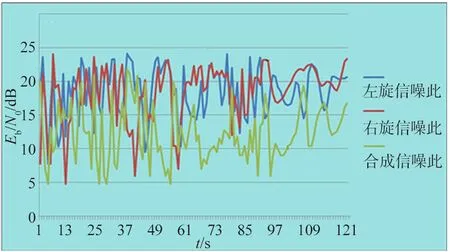
图1 存在链路时延差异分集合成效果Fig.1 Comparison of SNR with delay inequalities
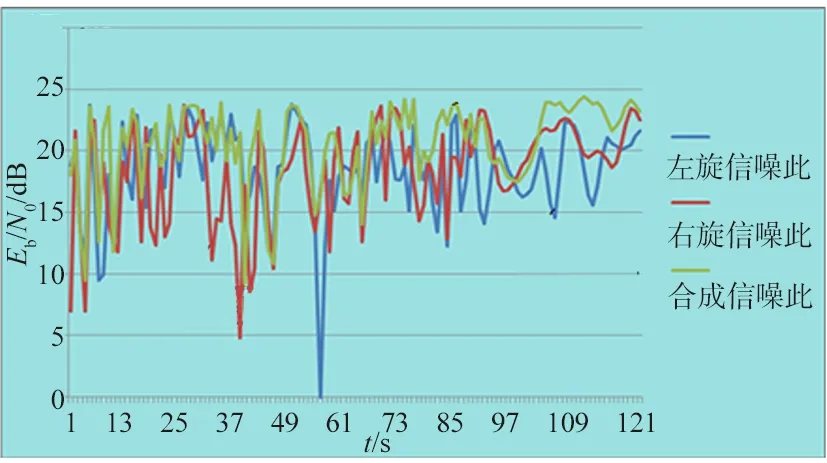
图2 补偿链路时延差异后分集合成效果Fig.2 Comparison of SNR no delay inequalities
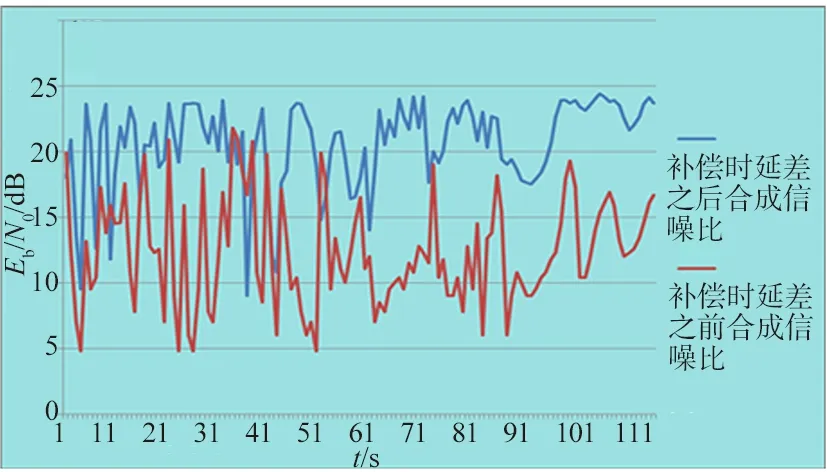
图3 补偿时延差前后合成信噪比对比Fig.3 Comparison of synthesis SNR among diffirent delay inequalities
2 链路时延差对数据解调的影响分析
工作在单旋向方式时,链路时延差对数据解调无影响,链路时延差对数据解调的影响主要是工作在分集合成方式时。测控设备中使用最广泛的是检前或检后最大比极化分集合成技术,由共模环和差模环2部分组成。其中共模环部分用于跟踪输入信号的公共频率和相位变化,差模环部分用于跟踪2路输入信号之间的频率和相位变化,并对称控制2路输入信号对应的本振NCO频率和相位,保证跟踪的连续性[8]。
在分集合成模块中,对输入的左、右旋数字中频信号进行正交混频,得到IL,QL和IR,QR两路基带信号,送入差模环和共模环中进行闭环。2路差模NCOL,NCOR输出对称的处于共模环NCO两侧,并始终保证分别与左、右旋接收信号载波同频同相,实现对2路信号载波的跟踪,如图4所示。
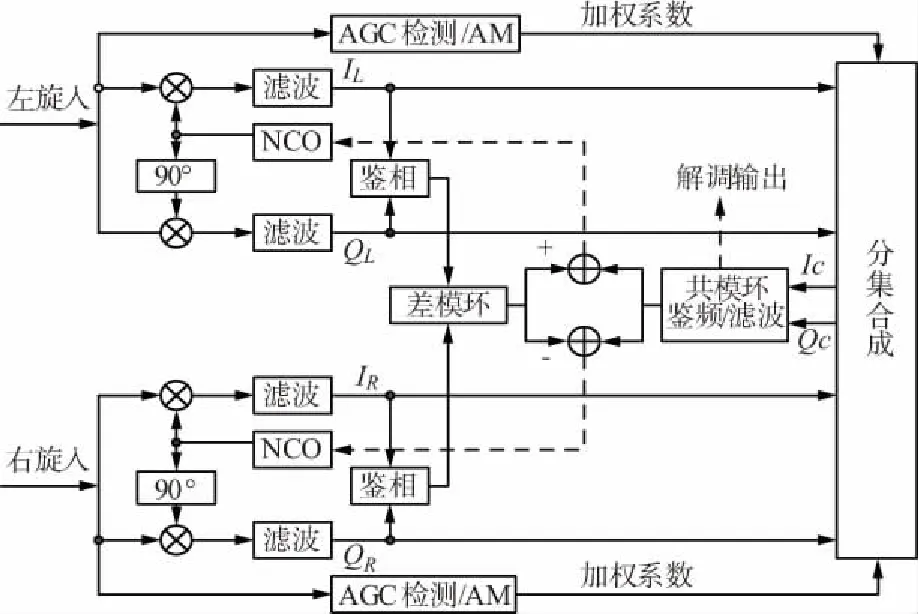
图4 调频模式信号处理流程Fig.4 The flow chart of FM mode signals process
极化合成方式时,分集合成模块输出左、右旋NCO实现对左、右旋接收信号载波频率和相位的跟踪,而左、右旋时延差无法消除。合成系数通过左、右旋信号符号信噪比计算,由于计算时采用的是同一路符号定时脉冲,当左、右旋信号时延较大时,计算出的2路信号的信噪比差会增大,当差值超过一定范围则退出分集合成模式,信号接收流程如图5所示。
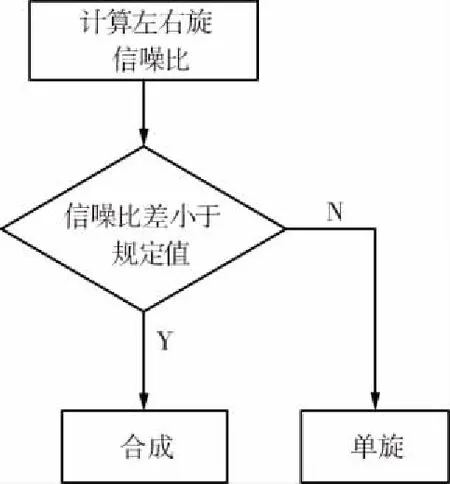
图5 信号接收流程Fig.5 The flow chart of signals received
从分集合成原理可以看出,最大比合成能够调整左、右旋相位,使其满足合成对左右旋相位同步的要求,当和路左、右旋存在较大时延差时,由于数据跳变的影响,将出现合成增益下降,甚至出现负增益的情况。在相同时延差情况下,码速率越高,相互抵消导致恶化的现象越明显。根据理论分析及实验验证,当左右旋信号大于码元周期的5%时,会对分集合成产生影响。
3 链路时延差对角误差解调影响分析
3.1 对调频角误差解调的影响
调频模式角跟踪为双通道单脉冲跟踪体制,角误差解调采用检前最大比极化分集合成技术,即左、右旋差路信号先进行分集合成,合成后的I,Q信号提取误差信号。差路信号分集合成方式与和路相同,如图4所示,但其AGC、共模环和差模环不自控,使用和路信号分集合成的控制信号,确保和、差解调信号的幅度相位一致性[9]。完成差差校相及和差校相后,角误差解调流程如图6所示,合成和I,Q,差I,差Q通过复数相关得到方位误差电压和俯仰误差电压。
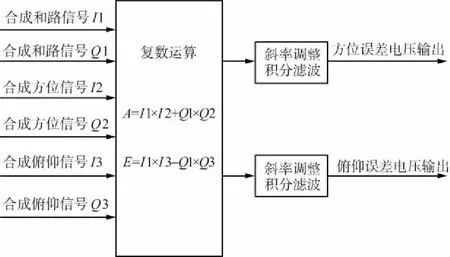
图6 调频模式角误差解调流程Fig.6 The angular error demodulatiaon of FM mode flow chart
经过混频、校相后的和路与差路信号表达式分别为[10]:
(1)
(2)
(3)
(4)
(5)
(6)
经过复数运算,得到方位和俯仰误差电压:
A=I1×I2+Q1×Q2 ,
(7)
E=I1×I3-Q1×Q3 。
(8)
从公式推导可以看出,对于分集合成模式下的角误差解调,如果和、差路信号存在时延差,会影响相关值的大小,码率越高影响越大。根据原理分析及实验验证,和差链路时延差大于码元周期的10%时,会对跟踪性能产生影响。同时,从前文分析可知,当左、右旋信号存在时延差时,会对分集合成效果产生影响,同样会对调频模式角跟踪产生影响。
3.2 对数传角误差解调的影响
以数传BPSK体制为例,其角误差解调为双通道单脉冲体制,信号形式为[11]:
ΣIF=A×d×cos(ωc×t) ,
(9)
ΔIF=A×d×ΔA×cos(ωc×t)+
A×d×ΔE×sin(ωc×t) ,
(10)
式中,d为数据码元的跳变。当实现了载波的自动校相后,角误差信号的解调流程如图7所示。

图7 数传跟踪角误差解调流程Fig.7 The angular error demodulatiaon of DDT mode flow chart
通过载波环解调后的和路与差路信号形式如下:
Σ=d,
(11)
ΔI=d×ΔA,
(12)
ΔQ=d×ΔE。
(13)
利用和路信号对差路信号进行去码元之后的差路信号形式如下:
ΔI1=ΔI×SGN(Σ)=ΔA,
(14)
ΔQ1=ΔQ×SGN(Σ)=ΔE。
(15)
从以上公式可以看出,由于数传角误差解调时使用和路数据对差路进行去数据化处理,如果和、差链路时延较大时,去数据化就会有误差,影响接收机校相及跟踪,码率越高影响越大。根据原理分析及实验验证,和差链路时延差大于码周期的10%时,会对角跟踪性能产生影响。
3.3 对扩频角误差解调的影响
扩频TT&C角跟踪采用双通道单脉冲体制,其信号形式为[12-13]:
ΣIF=d×pn×cos(ωc×t) ,
(16)
ΔIF=d×Pn×[ΔA×cos(ωc×t)+ΔE×sin(ωc×t)],
(17)
式中,d为数据码元跳变;Pn为伪随机码。实现了载波和伪码的自动校相后,其角误差的解调、去数据化过程与数传模式一致。该类型的角误差解调也需要用和路信号对差路信号进行去数据化处理,但在扩频体制中,符号速率较低,和差链路时延差对载波跟踪性能的影响较小,可以忽略不计。其校相过程包括载波校相和伪码校相,若和差链路时延差较大,会导致载波相位及伪码相位模糊,载波相位模糊不影响角误差解调的正确性,伪码相位不允许存在整数倍周期的模糊,否则会对跟踪性能造成影响,伪码码率越高,影响越严重。理论分析及实验验证表明,和差时延差异超过1/2个伪码码元时,将导致无法跟踪目标。
3.4 对单载波角误差解调的影响
单载波的角误差解调采用双通道单脉冲体制,其信号形式为[14]:
ΣIF=A×cos[ωc×t+f(t)] ,
(18)
ΔIF=A×ΔA×cos[ωc×t+f(t)]+
A×ΔE×sin[ωc×t+f(t)] 。
(19)
角误差信号的解调流程如图8所示。
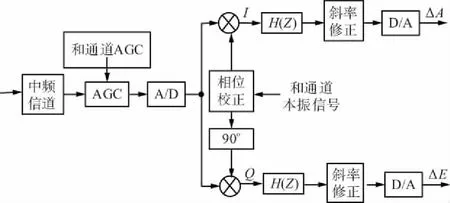
图8 单载波跟踪角误差解调流程Fig.8 The angular error demodulatiaon of sigal carrier flow chart
和路信号载波锁定后,由和通道信号恢复的本地数字载波参考信号和AGC增益控制电平输出到差通道角误差解调部分,作为和、差通道幅相归一化的基准。为补偿和、差通道信息传输造成的同步时延,和通道送来的本振参考信号需要在校相过程中通过相位校正模块进行相位修正,以保证差路输入信号与本地参考信号同频同相。该类型的角误差解调不需要去除数据的影响,载波相位模糊不影响角误差解调的正确性,所以链路时延差异对跟踪性能的影响可以忽略不计。
4 链路时延测试方法及修正措施
由前文分析可知,链路时延差异对于不同测控体制、不同数据码率的数据解调及角误差跟踪有不同程度的影响,特别是数据码率较高时,要求下行各链路时延尽可能保持一致。在实际使用时,可以借助偏馈阵子及校零变频器,通过启用测控系统偏馈校零模式,对下行各测控链路分别进行偏馈距离零值标校[15],通过实测各链路距离值计算出各链路的时延差异,在下行链路中串入对应长度的电缆,使各链路的实测距离值保持一致。
5 结束语
下行链路时延差异包括和路左、右旋时延差异及跟踪和、差链路时延差异,和路左、右旋时延差异对分集合成方式的数据及角误差解调均有影响;对于不同测控体制的双通道单脉冲角误差解调,和、差链路时延差异对角跟踪的影响不同。下行链路时延差异对测控设备带来的数据解调及跟踪异常,故障部位隐蔽,分析定位困难,严重影响测控任务的圆满完成。无线电测控设备研制(改造)时,应充分关注电缆走向及器件差异等对链路时延的影响,分段对下行链路时延进行测试、调整,基带设备应具备一定的链路时延自动调整功能。船载测控设备测控模式较多,下行链路组合繁多,基带设备位置不同,调整链路组合时,也需考虑链路时延差异带来的影响。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
感染、炎症、修复(2021年3期)2021-11-30
中国船检(2020年11期)2020-11-27
雷达学报(2018年5期)2018-12-05
电机与控制学报(2018年9期)2018-05-14
课程教育研究(2018年1期)2018-03-31
移动通信(2017年11期)2017-06-20
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
