
GFDM系统中基于扩展卡尔曼滤波的ICI消除
2020-03-04 03:40方志军张彦宇
无线电工程 2020年2期
冉 超,方志军,张彦宇
(上海工程技术大学 电子电气工程学院,上海 201620)
0 引言
广义频分复用(GFDM)是正交频分复用(OFDM)的广义形式,在解决OFDM的局限性的同时保留了OFDM大部分优势特性,成为5G系统多载波调制技术之一[1]。GFDM将时间和频率资源划分为独立的块,每个子载波包含多个子符号,且子载波和子符号的数目可以在不同情况下灵活地进行配置,这使得GFDM可以很容易地兼容CP-OFDM或单载波频域均衡[2]。除了OFDM的优点外,GFDM还具有合适的峰值平均功率比(PAPR),适用于认知无线电网络[3],能够控制带外辐射,忽略子载波的正交性[4],做到在时间和频率上的复用。
尽管GFDM具有许多优点,但仍然存在和OFDM系统类似的一些问题,例如由于CFO的存在而产生的ICI效应。因此接收机必须使用一些干扰抵消算法来降低比特出错概率(BER)。文献[5]采用匹配滤波器(MF)、零强迫(ZF)和最小均方误差(MMSE)接收机来减小载波间干扰。文献[2]利用双边ICI对消(DSIC)技术降低了GFDM的BER。
ICI的产生主要有2个原因:① 由于脉冲形成的灵活性而忽略了子载波的正交性[5];② 存在CFO[6]。针对OFDM系统中CFO问题,许多学者提出了不同的方法。文献[7]使用最大似然(ML)接收机进行联合时频偏估计。文献[8]提出了一种非数据辅助的CFO估计方法。文献[9]把某个OFDM符号作为已知信息进行CFO估计。文献[10]使用扩展卡尔曼滤波进行CFO估计,并在高频偏情况下有较好的性能。
本文针对GFDM系统,比较了上述OFDM系统ICI消除方法,从BER角度分析了CFO对系统性能的影响,提出了基于扩展卡尔曼滤波的GFDM系统ICI消除算法。所提算法以迭代的方式,获取上一状态的频偏最优化估计值及其协方差进行当前频偏状态预测,利用受到ICI影响的接收数据符号和频偏估计量得到频偏校正值,消除ICI。
1 GFDM系统
GFDM发送端系统框图如图1所示。发送流程如下:将待发送的二进制序列编码后进行串并型转换,将串行序列分裂为K路并行的字符号序列,而每一路字符号序列有M个数据符号,对其进行N倍上采样,经过循环移位滤波器,将信号分散在不同的时隙上[11-12]。最后为抵挡多径信道造成符号间干扰而添加循环前缀(CP)[13-15]后获得待发送序列。

图1 GFDM发送端系统框图Fig.1 Block diagram of GFDM sender system
用dk[m]表示数据块中第m个子符号中第k个子载波上的数据符号,m和k的取值范围分别为0~K-1和0~M-1。每个dk[m]经过原型滤波器滤波后发送,滤波器脉冲响应定义为:
(1)
发射信号x[n]通过对所有子载波和子符号信号的求和得到:
(2)
由式(2)可知,发射信号是大小为MN的列向量,其矩阵形式:
x=Ad,
(3)
式中,数据向量d和传输矩阵A为:
(4)
接收端为发送端逆过程,对接收到的信号依次进行CP移除、均衡、GFDM解调、符号逆映射、译码后,得到二进制接收序列y,其表达式如下:

(5)

2 扩展卡尔曼滤波
卡尔曼滤波可以从有噪声的传感器测量值中进行随机估计,在信号处理中常被用来估计系统的线性状态。实际上就是将信号进行数学变换、预测、校正的过程,与其他滤波器相比,其最小化了估计结果的误差协方差。卡尔曼滤波器核心思想是利用上一状态的最优化估计值和当下状态的测量值来迭代估计当下状态的估计值。卡尔曼滤波解决了动态系统线性模型中状态向量的估计问题,然而当模型是非线性时,将非线性系统线性化后再做卡尔曼滤波处理,由此产生的滤波器称为扩展卡尔曼滤波器。扩展卡尔曼滤波方程如下:
① 首先引入一个离散控制过程的系统,设当前状态为k,由上一状态预测最优结果得到的当前状态估计值:
x(k|k-1)=f(x(k-1|k-1),u(k))+w(k),
(6)
式中,w(k)为过程噪声,这里假设为高斯白噪声;u(k)为k时刻对系统的控制量;f()为线性过程。
② 由当前状态估计值得到当前状态测量值:
z(k|k-1)=hk(x(k|k-1))+v(k),
(7)
式中,hk(x(k|k-1))为上一状态的非线性的测量结果;v(k)为测量噪声,这里假设为高斯白噪声。
③ 由当前状态测量值和估计值分别对上一状态估计值求导,然后令x(k)=x(k-1|k-1),则
A(k)=f′(x(k-1|k-1),uk),
(8)
(9)
④ 由上一状态最优化估计值的协方差得到当前状态估计值的协方差:
p(k|k-1)=Akp(k-1|k-1)AkΤ+Sw,
(10)
式中,Sw为过程噪声w(k)的协方差。
⑤ 由当前状态估计值和当前状态测量值得到当前状态最优化估计值:
x(k|k)=f(x(k-1|k-1),uk)+
K(k)[z(k|k-1)-hk(x(k-1|k-1))],
(11)
式中,K(k)为卡尔曼增益:
K(k)=p(k|k-1)CΤ(k)[C(k)p(k|k-1)CΤ(k)+SZ]-1,
(12)
式中,Sz为测量噪声v(k)的协方差。
⑥ 为了向下一状态的协方差估计提供当前状态最优化估计值的协方差:
p(k|k)=(1-K(k)Ck)p(k|k-1)。
(13)
当系统进入下一状态,即k+1状态后,P(k-1|k-1)即为式(10),x(k-1|k-1)即为式(11),由此开始递归运算。
扩展卡尔曼滤波器对当下状态的估计过程是通过反馈过程进行控制的,其中最优化估计值作为反馈输入。故扩展卡尔曼滤波器可分为预测方程(状态更新)和校正方程(状态反馈)2个主要组成部分。预测方程通过获取上一状态的最优化估计值及其协方差来进行当前状态预测,校正方程根据当前状态测量值和估计值得到当前状态估计值,并计算其协方差,作为反馈的输入。
3 基于扩展卡尔曼滤波的ICI消除
基于扩展卡尔曼滤波的ICI消除方法主要有频偏估计和频偏修正2个步骤。
3.1 频偏估计
用Xi(k)表示第i个通道在频域上的第k个数据样本,经过IDFT,CP插入,第i个通道中的第n个传输时域样本可以表示为:
(14)
式中,-Ng≤n≤N-1,Ng是CP的长度,假设第i个通道的信道脉冲响应为:
hi=[hi(0),hi(1),...,hi(P-1)]Τ,
(15)
式中,P是最大信道延迟传播的长度且P≤N。用εi表示第i个通道在接收端的频偏,zi(n)表示加性高斯白噪声,第i个通道接收到的信号为:
(16)

(17)
式中,z(n)是接收端信道噪声的总和。 去掉CP并进行n点DFT后,接收到的信号在频域表示为:
(18)
式中,k=0,1,...,N-1。
假设在接收端所有通道用于频偏估计的前导码都是已知的,并且对各个通道的信道进行了完美估计。因此,式(18)中的yi(n)在接收端是已知的。一般来说,频偏可以通过最小化以下代价函数来估计:
(19)

基于扩展卡尔曼滤波的频偏估计没有求解上式中的优化问题,而是通过递归的方式实现,其中状态向量和度量向量都是一维的,从而避免了最优化问题,并且扩展卡尔曼滤波估计器具有较低的复杂度。假设信道在一个符号持续时间内是非频率选择性的,因此频偏近似为常数,故当前状态的频偏估计值可看作上一状态的最优化频偏估计值,且它们的方差也相等:
εi(n|n-1)=εi(n-1|n-1),
(20)
pi(n|n-1)=pi(n-1|n-1) 。
(21)
测量方程为:
(22)
式中,n为递归索引;wi(n)由信道噪声项z(n)和其他通道的干扰组成,假设wi(n)的方差是σ2。假设频偏量在(-τ,τ]之间,基于扩展卡尔曼滤波的频偏估计实现有以下几个步骤:

(23)
② 计算卡尔曼增益Ki(n):
(24)
Ki(n)=pi(n|n-1)CiΤ(n)[Ci(n)pi(n|n-1)CiΤ(n)+σi2]-1。
(25)
③ 更新估计量:
εi(n|n)=g{εi(n-1|n-1)+Iupdate(i,n)},
(26)
Iupdate(i,n)=Re{Ki(n)[ri(n)-yi(n)·
(27)
④ 计算估计方差:
pi(n|n)=[I-Ki(n)Ci(n)]pi(n|n-1)。
(28)
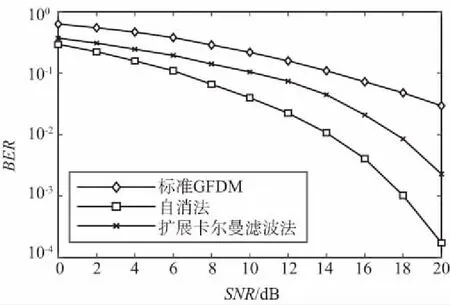
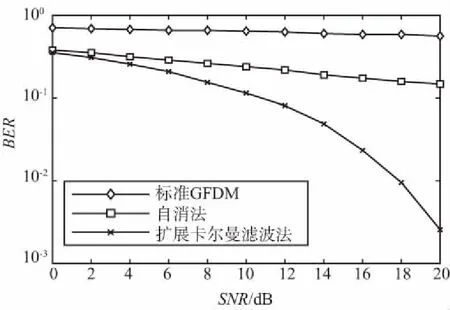
⑤ 如果n (29) (30) 利用Matlab仿真软件对针对GFDM系统提出的扩展卡尔曼滤波ICI消除进行性能测试。GFDM信号由一个降阶系数为0.1的根升余弦(RRC)滤波器产生,子载波个数为128,子符号个数为5,各子信道发送数据为16QAM调制且互相独立,采样间隔Ts=50 ns,保护间隔CP长度为16。 图2展示了不同频偏值ε对GFDM系统BER的影响。可以看出,当CFO偏移量增加时,系统性能下降。在频偏值在0.1左右时,标准GFDM系统性能开始大幅度下降,BER上升至0.01,并趋于稳定,表现了GFDM系统对频偏的敏感性。 图2 不同的频偏值对GFDM系统BER的影响Fig.2 Influence of different frequency deviation values on BER of GFDM system 图3展示了复加性高斯白噪声(AWGN)信道下使用扩展卡尔曼滤波消除ICI对GFDM系统BER的影响,可以看出,使用扩展卡尔曼滤波模块提高了系统性能,且在高信噪比下尤为显著。 图3 AWGN信道下使用扩展卡尔曼滤波消除ICI对GFDM系统BER的影响Fig.3 Use extended kalman filter eliminate the influence of ICI on GFDM system BER in AWGN channel 图4展示了基于扩展卡尔曼滤波的ICI消除算法均方误差,可以看出,该方法的最佳性能可以达到MSE=10-4的精度。 图4 基于扩展卡尔曼滤波的ICI消除MSEFig.4 ICI elimination MSE based on extended kalman filter 将本文提出的扩展卡尔曼滤波方法与ICI自消除方法及标准GFDM系统在AWGN信道下进行仿真和性能分析,归一化频偏为0.02,0.12,0.3时结果分别如图5~图7所示。 图5 AWGN信道下,归一化频偏为0.02时不同ICI消除算法性能比较Fig.5 Performance comparison of different ICI elimination algorithms in AWGN channel with normalized frequency offset of 0.02 图6 AWGN信道下,归一化频偏为0.12时不同ICI消除算法性能比较Fig.6 Performance comparison of different ICI elimination algorithms in AWGN channel with normalized frequency offset of 0.12 图7 AWGN信道下,归一化频偏为0.3时不同ICI消除算法性能比较Fig.7 Performance comparison of different ICI elimination algorithms in AWGN channel with normalized frequency offset of 0.3 系统仿真参数设置为:子载波个数为128,子符号个数为5,使用正交相移键控(QPSK)的调制方式,采样间隔Ts=50 ns,保护间隔CP长度为16。 从图5~图7可以看出,在频偏值为0.02时,扩展卡尔曼滤波方法因为需要对频偏进行估计,很难突出其优势。在频偏值为0.12时,ICI自消法和标准GFDM系统性能开始大幅度下降,ICI自消除方法只能通过线性变化来抵消ICI,不能估计频偏,所以在高频偏情况下很难有效抑制ICI。在频偏值为0.3时,扩展卡尔曼滤波依然具有很好的抑制频偏导致的ICI能力,故扩展卡尔曼滤波方法适用于环境恶劣,频偏比较大的场所。 本文提出了一种基于扩展卡尔曼滤波的GFDM系统ICI消除方法。仿真验证了不同的频偏值的对GFDM系统误码率的影响,并在AWGN信道下测试了基于扩展卡尔曼滤波的ICI消除算法对GFDM系统BER的影响。仿真结果表明,在接收端采用扩展卡尔曼滤波模块估计系统的CFO状况,降低了系统的误码率,且能够在频偏较大的场景下显著提高GFDM系统的性能。3.2 频偏校正

4 仿真结果




5 结束语
猜你喜欢
中国钢铁业(2022年8期)2022-12-21
中国钢铁业(2022年7期)2022-12-21
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2021年7期)2021-08-13
舰船电子工程(2020年3期)2020-06-11
科教导刊·电子版(2019年12期)2019-06-12
无线电工程(2019年6期)2019-05-29
计算机应用与软件(2019年2期)2019-04-01
电子制作(2019年23期)2019-02-23
经济研究导刊(2018年19期)2018-07-24
