无人机倾斜摄影测量应用于土石方量计算技术路线研究
2020-02-22 06:52李名哲
科技创新导报 2020年26期
李名哲
摘 要:传统的全站仪或RTK技术进行土石方的填挖计算,需要耗费大量的人力和物力,而且效率比较低,成本相对比较高。本文研究利用消费级无人机快速进行土石方计算,通过低空无人机获取影像,利用少量像控点,依据计算机视觉原理生成了地形稠密三维点云,实现了露天地形三维数字模型制作。研究区域选择了某块有起伏的地形进行试验,利用RTK采集地形高程点进行精度对比。试验的结果表明,利用无人机构建的露天地形三维数字模型计算的挖填石土方量误差在3%以内,完全满足工程中土石方量计算标准,该技术方法具有很高的实用价值。
关键词:全站仪 无人机 三维点云 三维数字模型 精度对比
中图分类号:P231 文献标识码:A 文章编号:1674-098X(2020)09(b)-0043-03
Abstract: The traditional total station or RTK technology for earth rock filling and excavation calculation needs a lot of manpower and material resources, and the efficiency is relatively low, the cost is relatively high. In this paper, the consumption UAV is used to calculate the earthwork quickly. The low altitude UAV is used to obtain the image, and a small number of image control points are used to generate a dense 3D point cloud based on the principle of computer vision. The 3d digital model of open terrain is realized. In the study area, a certain undulating terrain is selected for test, and RTK is used to collect terrain elevation points for precision comparison. The test results show that the error of earthwork volume calculated by the 3D digital model of open terrain built by UAV is less than 3%, which fully meets the calculation standard of earthwork volume in the project. This technology method has high practical value.
Key Words: Total station; UAV; 3D point cloud; 3D digital model;Precision comparison
1 引言
近幾年,伴随着国家经济发展与一带一路战略,各种类型的设施建设项目越来越多。挖填土石方量计算是各中工程项目建设必须环节之一。怎样使得工程项目的进度安排的经济合理,如何比较准确快速的对工程量大小与费用进行计算,其中就需要有高效率和准确的土石方量计算方法。因此选择合适的地形数据采集与土石方量计算方法十分重要。
利用无人机机动灵活和快速高效的特点,可大大提高数据获取效率和减小对摄影环境的依赖,利用无人机技术可以快速、准确地获取高分辨率的影像。无人机的应用已在工程的各个环节中起到越来越重要作用。使用无人机技术来进行挖填土石方量测量在国内外的众多学者也已开始试验。由于该方法不需要接触被测目标并且不受场地障碍的影响,大大降低了野外人工现场采集作业人力成本,可以快速获取测区的地形模型,降低了土石方量计算管理成本,为测量人员提供了安全保障。
2 基本原理
无人机3D建模技术是基于计算机视觉原理的3D建模技术。常规步骤如下:步骤1自动为给定图像检测可靠且足够密集的连接点,并使用该连接点自动重定向大量图像;步骤2根据重定向结果重建投影,并校准相机位置作为信息;第3步通过CMVS(cluster multi-view stereo),PMVS(patch-based multi-view stereo)和其他算法进行密集匹配;步骤4从点云通过建立三角形网格模型来获取目标3D模型。首先,通过使用POS系统或GNSS差分系统进行精确定位,为每个图像提供POS信息,并结合一系列步骤,例如基于图像的自动三重加密,密集图像匹配,映射进行纹理处理并最终生成模型,完成了整个3D重建过程。它适用于自动空三加密中的图像连接点匹配,图像匹配粗差检测和图像区域网平差三个步骤。相关技术将在下面介绍。
2.1 影像连接点匹配
目前,在影像连接点匹配中较为常用的SIFT特征点匹配算法。SIFT特征匹配算法与影像之间的大小和影像之间是否进行旋转无关,它是通过物体上的一些局部外观的兴趣点来进行匹配的。它对光线、噪声、微视角改变具有相当高的容忍度。通过这些特性,它们显著度高而且撷取也相对容易,在样本庞大特征数据库中,比较容易辨识物体并且误认率较低。对于影像中的对象有部分被遮蔽的使用SIFT特征描述监测率也较高,有时只需要有3个以上的SIFT物体特征就可以计算出位置和方位。
SIFT特征点匹配:(1)构建尺度空间:高斯卷积和图像金字塔;(2)检测尺度空间的极值点,在DOG尺度空间本层以及上下两层26个领域中是最大和最小值,然后剔除对比度低的关键点以及不稳定点的边缘响应点;(3)计算关键点主方向;(4)生成128维的关键点描述子;(5)SIFT匹配:通过计算待匹配的两特征点间的欧氏距离作为匹配测度。
2.2 倾斜影像匹配粗差检测
(1)采用RANCSAC(随机采样点一致性)的方法,基于5点法相对定向模型(共面条件)进行粗差检测;(2)基于双模型的粗差点检测:对于双模型间的三度重叠点,采用空间前方交会计算点残差,剔除残差大的粗糙点;(3)基于双模型的相对定向可靠性检测:不断选择相互间具有足够连接的三张影像,依次在影像间两两进行相对定向,计算相对定向线元素和旋转矩阵。如果相对定向正确,三个线元素向量应共面,三个旋转矩阵相乘为单位阵。
2.3 倾斜影像拼接
对于虚拟影像上的像素,综合考虑以下条件,选择在那张倾斜影像上获取其灰度值:(1)该像素对应地面点到候选点倾斜影像的距离;(2)地面点到虚拟影像透视中心的光线与地面点到候选影像透视中心的光线间夹角。
减小高出地面竖直物体的重影效应的方法:(1)在平坦地区进行拼接;(2)采用待拼接的两影像在接缝处密集匹配生成DSM;(3)在倾斜影像和对应的下视影像间匹配直线特征,识别竖直物体,而对其位置进行改正。
3 实施技术路线
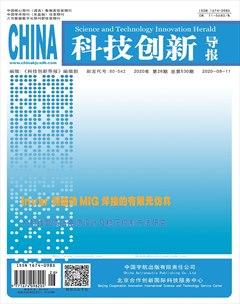
土方量的计算是要查找地形表面的体积差异,主要是当前地形和给定高程之间的差异。因此,空中无人机勘测挖掘的土石方量的计算主要是利用无人机获取图像。为研究区域构建数字高程模型(DEM)和数字正射影像(DOM),设计高程并导入ARCGIS,然后使用软件中的DEM和DOM选择区域和DEM模型,进行计算,并对DEM数据和研究区域设计标高进行统计分析,以计算土石方开挖过程中的开挖和填土量。技术路线的流程如图1所示。
3.1 外业数据采集
(1)设计航带。首先对测区进行实地踏勘,根据情况选择有起伏的地形的工地进行试验,按照《低空数字航空摄影测量外业规范》(CH/Z3004—2010)中规范要求,对该项目进行外业航带的设计。根据要求,该项目确定航飞高度为50m,航向重叠度和旁向重叠度分别为75%和45%。
(2)像控点布设。根据规范要求,本项目在测区四周以及中间均匀布设了6个平高控制点,并保证控制点至少能在三张影像上同时找到。
(3)航测参数设定。根据航飞现场情况,确定各项飞行参数,完成航测数据采集工作。
3.2 航测数据处理
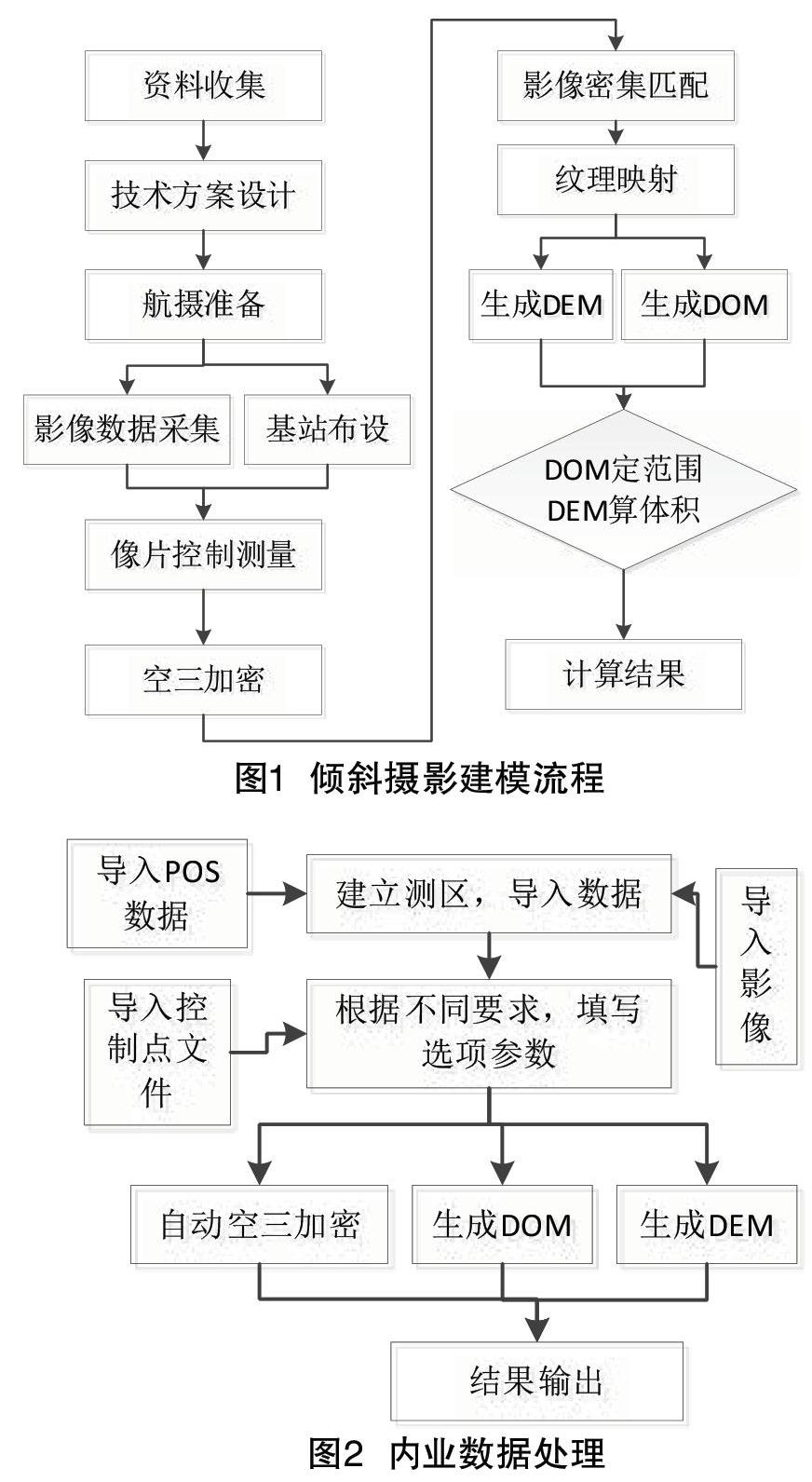
对采集完成的航测数据采用smart3D软件进行数据处理,流程如图2所示。
3.3 土石方量计算与分析
(1)将生成DEM 数据导入Arcgis软件中,使用3D分析工具DEM数据作为输入数据选定一定标高作为挖填基准面。进行挖方与填方的计算,分别计算出设计标高情况下的挖填方量。
(2)使用RTK对研究区域内的地形特征点进行采集,得到研究区域的地形特征点的高程值,并将其数据采集结果导入Cass7.0里使用方格网法和三角网法以设定的标高作为挖填基准面,计算挖填方量。
(3)分别将传统方法和无人机生成DEM方法进行挖填石土方量计算结果进行比较,传统GNSS测量特征点使用方格网法和三角网法计算得到土石方量结果与无人机航测计算结果进行比较,测区面积27 425.0m2,两种方案的挖方量相差结果为168.37m3,占总挖方量的3%,填方量相差结果为1 078.36m3,占总填方量的1.3%。
4 结语
通过采用无人机航测技术来进行挖填土石方量计算并对其结果进行比较表明,通过使用无人机航测技术使得工程中的土石方量计算拥有了一些的优势。
(1)与传统GNSS或RTK采集特征点进行土石方测量方法相比,无人机航测技术体现出灵活、机动,不需要接触被测目标并且不受场地障碍的影响,无论是平缓还是陡峭地形均都可以进行。
(2)数据的采集更加迅速,该测区面积27 425.0m2,使用傳统RTK特征点方法数据采集花费时间为4h左右(时间长短因地形情况会有所变化),而无人机航测技术构建DEM方法仅需4min完成外业数据采集,所以当测量面积较大或地形复杂时其优势更加明显,此方法减少了外业人员投入,减轻了外业的工作量,大大节约了生产的成本。
(3)由于使用无人机采集数据,在获得DEM数据同时,此方法还获取了影像数据,对于准确划定土石方量的计算范围起到辅助作用,最终计算出更准确的结果。
参考文献
[1] 张斗龙.基于复合翼无人机航空摄影测量技术在矿山测绘中的应用[J].江西测绘,2020(3):30-32.
[2] 莫寅.基于无人机倾斜摄影测量的大比例尺地形图测绘方法[J].北京测绘,2020(1):79-82.
[3] 雍昭君.无人机倾斜摄影测量三维建模精度多层次模糊综合评价研究[D].武汉:华中科技大学,2019.
[4] 吴国荣.无人机倾斜摄影测量在城市建筑物竣工测量中的应用[J].城市勘测,2019(8):112-116.
[5] 柳静.无人机倾斜摄影测量三维模型绘制大比例尺地形图精度研究[D].西安:西安科技大学,2018.
[6] 李通.基于倾斜摄影测量的大比例尺三维测图技术[J].北京测绘,2020(4):543-546.
猜你喜欢
水电站设计(2020年4期)2020-07-16
工程与建设(2019年3期)2019-10-10
人间(2016年26期)2016-11-03
电测与仪表(2016年9期)2016-04-12
吉林地质(2014年3期)2014-03-11
河南科技(2014年22期)2014-02-27
河南科技(2014年5期)2014-02-27