
深拖系统在深远海调查中的应用
2020-02-22 11:07田春和
水道港口 2020年6期
田春和,王 敏,杨 鲲
(1.交通运输部天津水运工程科学研究所,天津 300456;2.天津水运工程勘察设计院 天津市水运工程测绘技术企业重点实验室,天津 300456;3.山东科技大学,青岛 266510)
中国是海洋大国,开发、利用和保护海洋是国家发展的硬性需求,也是“海洋强国”战略的重要内容。在深远海探测方面,发展集成度高、水下操控便捷、数据采集及传输能力强的深拖系统尤为重要。深拖系统可长时间进行水下作业,适用于深远海搜救,也适用于大范围海底目标的探测、海洋测绘、海洋地质勘探、辅助海洋工程作业等。目前,国内深拖系统仅有几十台套,数量难以匹配我国在深远海域探索的需求。
深拖系统是一种拖缆式声学深潜器,它将侧扫声呐、多波束测深系统、浅地层剖面仪多种海洋调查仪器组合安装在深水拖体上。其主要功能是近海底对海底地形地貌、浅地层剖面和水体物理化学参数进行长时间、实时探测,可应用于海洋开发和矿产资源调查、海上油田区域探测、海洋工程等领域,还可用于深海特征物调查和配合大型设备作业[1-6]。在实施调查时,为避免船生噪声和海面湍流的影响,将拖体沉放到一定深度,一方面减少水体对仪器探测效果的影响,另一方面减少了海水的吸收和声束散射引起的信号损失,最大程度降低了虚假反射,提高了声学采样密度和采样精度。
国内目前对于深拖系统的研究较少,主要限于作业流程、定位方法和数据处理等方面。汤民强与毕永良[7]总结了深海路由勘察项目中深拖系统与AUV系统的作业方法与技术难点,比较了二者的优缺点。朱友生与罗进华[8]对深拖系统采集数据的定位误差、声图畸变等问题进行了研究,给出了有效的解决方法。陈小冬[9]总结了深拖系统水下USBL定位和精度提升方法。
本文拟在前人研究的基础上,对深拖系统的组成、定位方法和作业流程做进一步探讨,并结合实际调查案例,说明深拖系统多波束测深数据的反演方法和浅地层剖面声图畸变的校正方法。
1 深拖系统组成
以Teledyne Benthos TTV-303深拖系统为例,来说明深拖系统的主要组成。
2.培养业务人员和财务人员税务筹划意识及业务能力,最大限度地节约采购成本。餐饮行业进项税发票的取得直接关系到企业的经营成本及利润的多寡,营改增后在企业里应对相关政策进行宣传和培训,尤其要对业务人员和财务人员加强增值税及发票知识的培训,让他们清楚地知道能否取得可抵扣发票及取得发票的税率对于经营成本和企业利润都产生直接的影响。采购人员应减少向小规模纳税人的供应商采购,因为小规模纳税人一般只能开具增值税普通发票,即使到税务局代开发票也只是3%的税率。在和供应商的价格谈判过程中,除了要考虑采购总价还要考虑可抵扣的税金对于成本的影响。
深拖系统由拖甲板通讯供电单元、拖曳载体、压载器、布放回收装置四部分组成(图1),包括耐压6 000 m级的侧扫声呐、多波束测深系统、浅地层剖面仪、超短基线水下定位系统、惯性导航系统、温盐深仪、多普勒计程仪、表面声速仪、高度计以及故障应急回收装置,并配备有万米数控液压绞车和光电复合缆、伸缩式A架施放系统等国际先进的辅助设备。
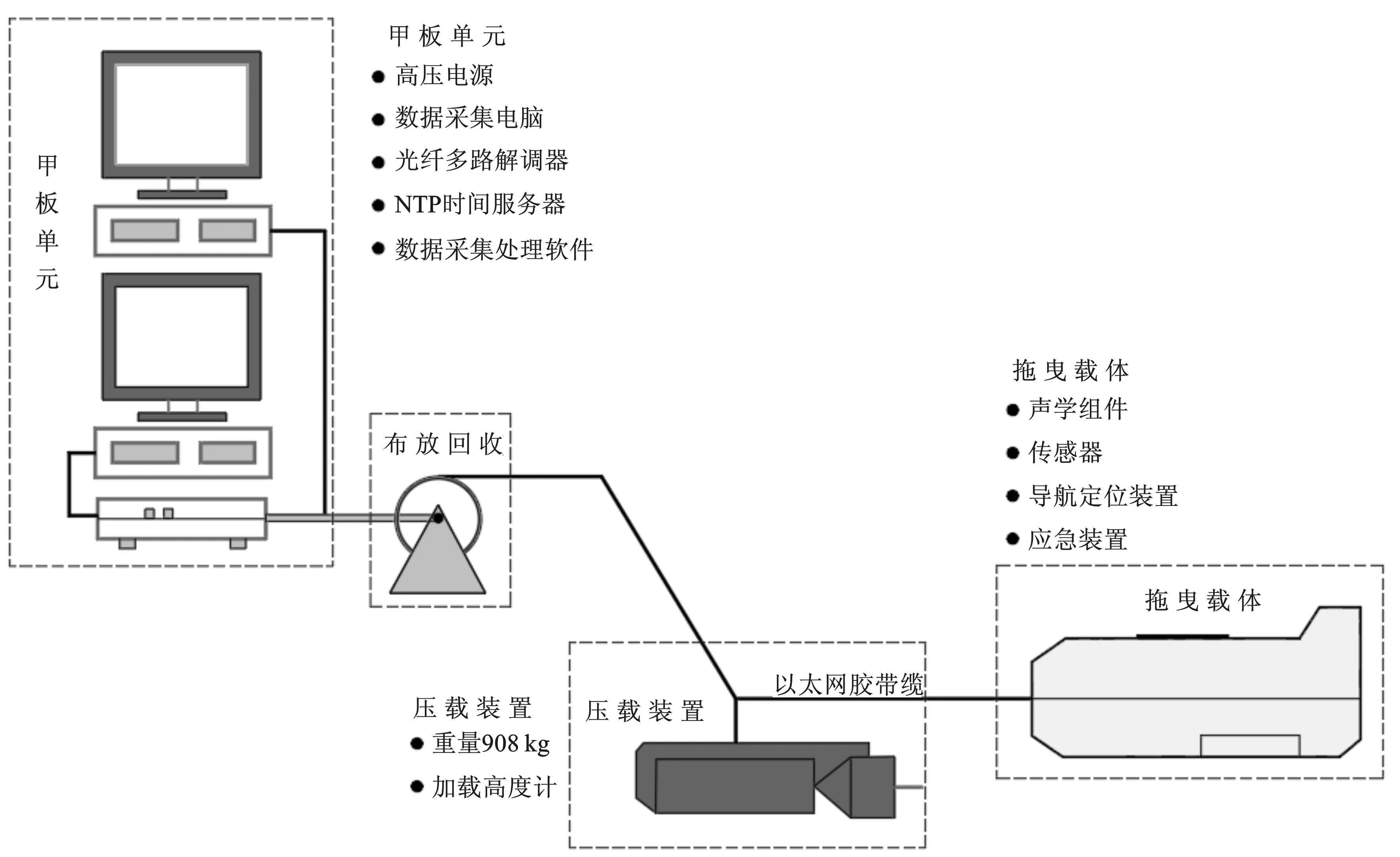
图1 Benthos TTV-303深拖系统组成示意图
拖曳载体主要搭载声学测量组件、传感器、导航定位装置和紧急回收装置。压载器搭载高度计、湿端光电/以太网电子舱、光电复合缆承重拖曳终端及破断卸扣,作业时位置低于拖曳载体,可为拖曳载体作业提供保护。布放回收装置主要包括A架和绞车,绞车上缠绕光电铠装复合缆,为拖曳载体提供配套的机械连接,并满足拖曳载体供电及数据传输要求。甲板通讯供电单元除提供供电和通讯之外,还包含数据处理工作站,安装配套软件,提供数据采集和后处理功能。该系统可长时间进行水下作业,并获取信噪比较高的海底及地层声学反射图像。
甲板通信供电电源同步系统是深拖系统集成的核心设备,其主要功能是作为系统水上与水下之间供电、通信和同步的转换设备,完成水下声呐设备和传感器数据与水上船载设备数据的交互传输、多部声呐设备的协调、水上水下同步信号的传送、水上高压直流电源到拖曳平台设备所需供电的转换等功能。
甲板通信供电电源同步系统主要包括电源系统、光纤多路复用器和同步系统三部分,每个部分又各自包含水下单元和水上单元。主要包括水下通信供电同步单元、水上通信同步单元和水上供电单元3个设备,其中水上供电单元又包括水上供电单元、不间断电源和220 V插座三个部件。
拖曳载体主要由声学测量组件、传感器、导航定位装置和应急装置组成。其中声学测量组件主要包括UUV-3500侧扫声呐、浅地层剖面仪、多波束测深仪;传感器主要有温盐深传感器、高度计和表面声速仪;导航定位装置主要包括超短基线定位信标、惯性导航(Phins)和多普勒计程仪(DVL);应急装置主要包括铱星信标、频闪灯、声学释放器等。
深拖系统测量时,测量母船航行至目标水域,上线测量时航速保持在1 kn左右。数据采集前,要打开定位体系阀门开启超短基线定位系统,使得超短基线水听器伸出船底,与此同时,通过布放回收装置布放拖体,使拖曳体逐步下放至指定位置。值得一提的是,拖曳体下放过程中要适当匀速加快航速至2~4 kn,以防线缆绞缠在船尾桨中。拖曳体数据采集过程中,压载器和拖体的最小离海底高度不应小于20 m。
压载器采用铁和铅作为主要材质,重量约为908 kg,其搭载高度计、湿端光电/以太网电子舱、光电复合缆承重拖曳终端及破断卸扣。
布放回收装置包括A架、数控绞车、万米光电复合铠装缆。A型门架固定安装在母船船尾,用于深拖布放回收,并在作业过程中为铠装缆提供支撑。万米光电复合缆长度为10 000 m,主要用于深拖的拖曳作业和数据的通信传输。
2 工作方法及流程
此解决方案绝对定位精度为或略优于超短基线定位系统的定位精度,即约0.2%斜距(或1 m)。相对定位精度一般可达到约为0.5%航程[11-13]。
石羊河流域高效节水灌溉与农业种植结构调整…………………………………………… 李元红,王以兵(5.52)
人耳对语音信号的相位信息不是很敏感,可以认为语音信号的相位在处理过程中不改变,因此的相位谱可用Y(m,k)的相位谱近似代替,最后对其进行傅里叶逆变换便可得到增强后的语音信号的时域表示。由此可见,在维纳滤波算法中,对G(m,k)的求解至关重要。基于最小均方误差准则,定义增益函数G(m,k)为:
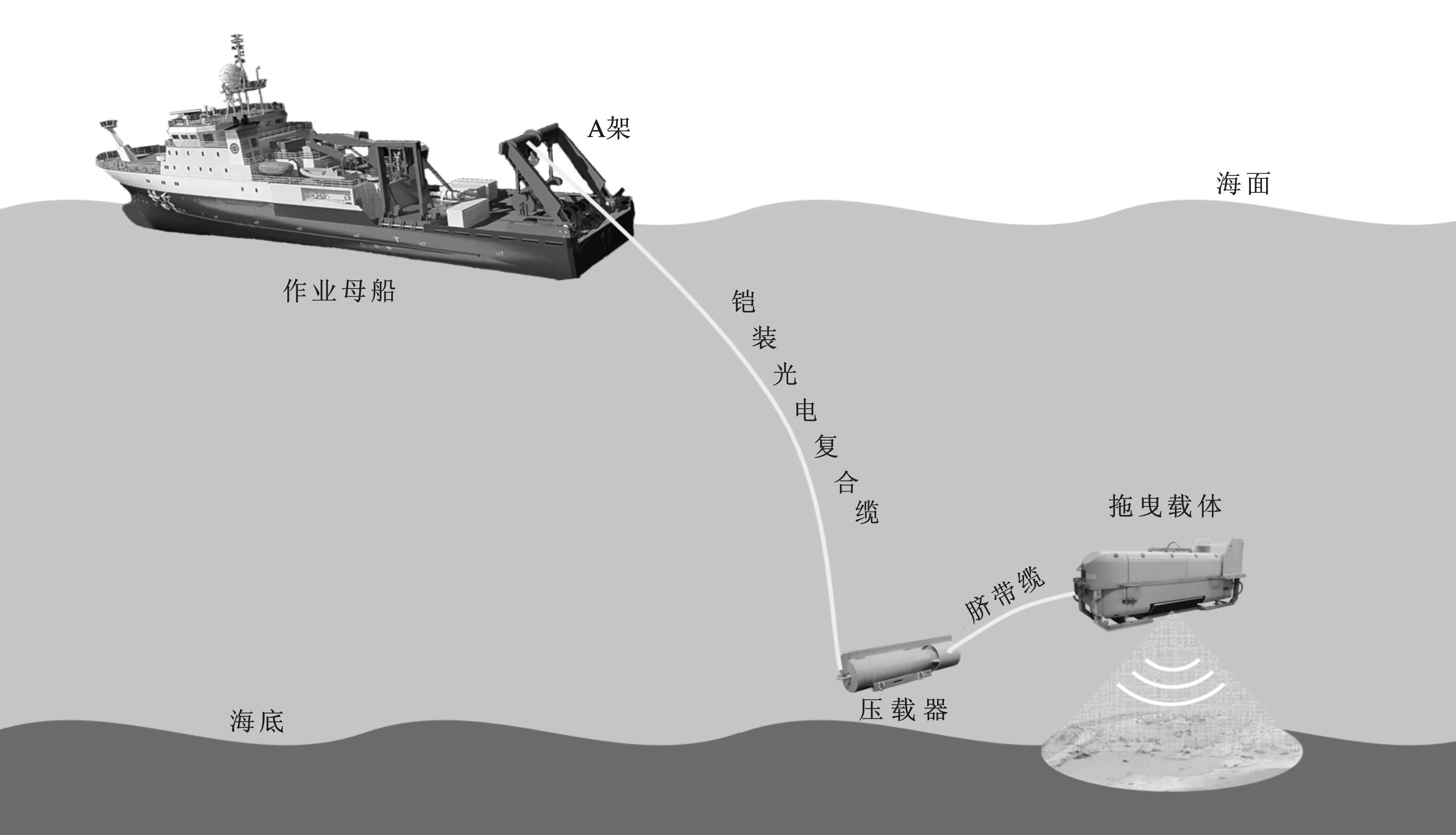
图2 6 000 m级深拖系统作业方法示意图
深拖系统用于海底目标的探测,需要较高的探测精度,因此采用船载星际差分GNSS+超短基线定位系统+声信标+惯性导航单元+声多普勒测速仪+压力传感器的方式进行定位。定位系统主要包含惯性导航单元、声多普勒测速仪、压力传感器、超短基线定位系统、声信标和GNSS系统6个设备。其中声信标包含声信标和声信标换能器两个部件,GNSS系统包含GNSS接收机和GNSS天线两个部件,超短基线定位系统则包含USBL系统接线单元和USBL系统水下基阵两个部件,而且USBL由于其便捷性,是目前水下定位的主流[10]。
船载星际差分GNSS用于获得船舶的绝对位置,结合超短基线定位系统(USBL)和声信标可以获得拖体在大地坐标系下的位置,如果加入压力传感器数据可以提高其水下定位精度。由于有惯性导航单元,以其为核心部件组成惯性组合导航系统,可以大大提高系统定位的稳定性,也能够获得良好的定位精度和载体姿态数据。此时如果部分传感器出现短时无数据,惯性组合导航系统能够在一定时间内保持较高的定位精度。USBL定位系统和声信标用于提供水下拖体的绝对位置。并可用于修正惯性导航单元产生的漂移。考虑系统轻便性的总体要求,需要所使用的USBL系统能够方便部署、便携安装,并且能通过将专用姿态测量设备与USBL阵安装在一起,实现系统校正过程的简化。
拖体就位后,船舶按照预先布设的测线进行线上作业航行,作业航速保持2~3 kn,最大航速不超过4 kn。换线作业母船需转弯时,应快速收紧拖缆,使其长度小于水深,母船转弯半径一般为拖缆长度的2~3倍为宜。作业结束后,船舶减速,航速保持在1~2 kn,通过绞车收缆将拖曳体回收至安全高度(缆长不低于50 m),且收回超短基线水听器,关闭超短基线定位系统。
深拖系统在作业时,作业母船通过一条铠装光电复合缆与压载器相连,压载器和拖曳载体之间由一条长约50 m的中性浮力以太网脐带缆连接,使拖曳载体位于距离海底一定高度的海水中匀速航行。甲板通讯供电单元通过铠装光电复合拖缆向拖曳载体提供电源和通信,拖曳载体将采集到的数据通过脐带缆、铠装光电复合缆传回甲板单元,并显示于数据采集电脑(图2)。
3)合理修剪。梨园要适度密植,通过合理修剪改善通风透光条件,对减轻病害发生非常重要。修剪时要剪除密挤、冗长的内膛枝,疏除外围过密、过旺、直立生长枝条,对发病较重的树要适当重剪。同时调整好负载,以提高树体抗性。
在高产创建示范区内积极引进优质抗病性能优异、适应性广泛、生育周期短的优良品种。最近几年在澜沧县糯福乡水稻品种推广应用主要有宜香3003、宜香4245、宜香305、两优2161、两优6等品种。当然,在高产创建过程中,示范区内的主导品种原则上不能超过3个,要确保相对集中连片种植。
根据实际工作经验,放缆过程中,当拖曳体距海底距离大于600 m时,放缆速度应小于50 m/min;当拖曳体距海底距离小于600 m时,放缆速度保持10~20 m/min。收缆过程中,当拖曳体距海面距离大于300 m时,收缆速度应小于50 m/min,当拖曳体距海面距离小于300 m时,收缆速度保持10~20 m/min。作业时,保证拖缆固定在滑轮上,处于张紧状态(图3),若非紧急情况,不得关闭绞车。
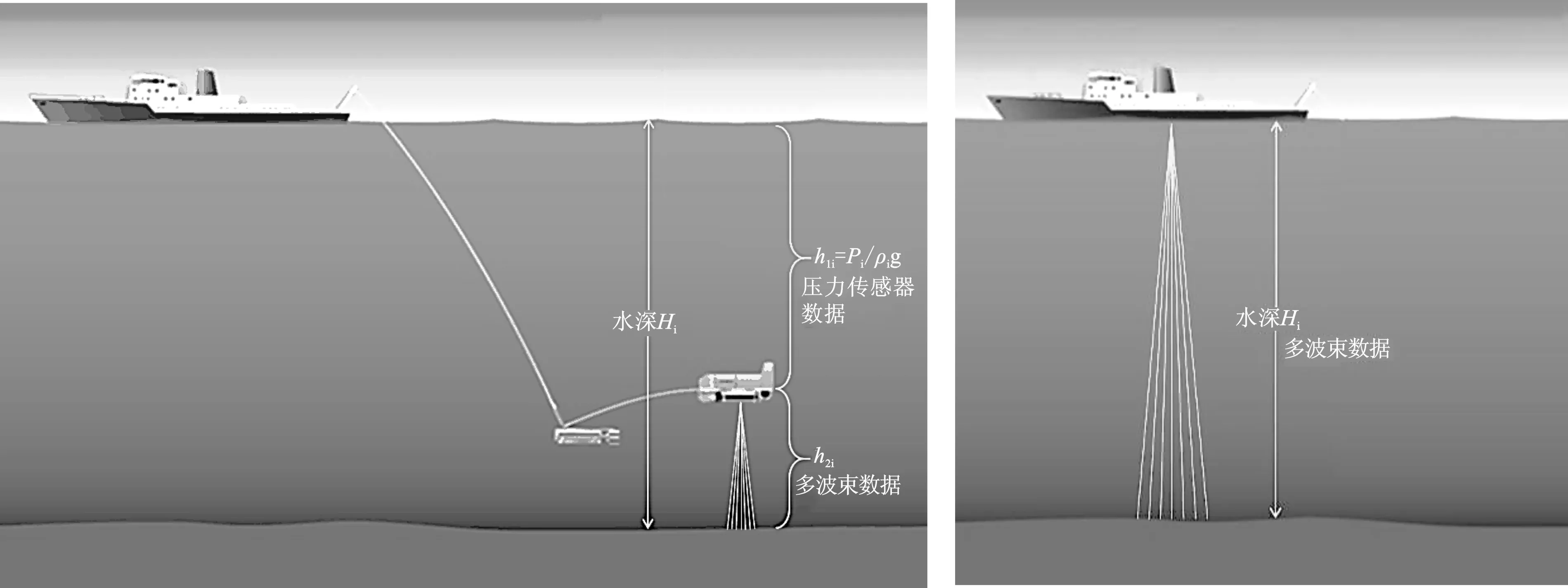
3-a 深拖系统多波束测深示意3-b 船载多波束测深示意
3 成果资料处理解译
3.1 深拖多波束数据处理
与传统船载测量方式相比,深拖系统最明显的特点为:因为搭载多波束换能器的拖体在工作时沉放到了距离海底面较近的位置,大大缩短了换能器到海底的距离,波束脚印更加收敛,波束点密度更高,从而提高了海底地形测量精度和目标搜寻精度。
式中:hi为某处水深,m;h1i为该处多波束换能器到海面的高度,m;h2i为该处深拖系统多波束测深值,m;Pi为压力传感器于该处测得的压强,kPa;ρi为该处压力传感器以上所有水体的平均密度,kg/m3;g为重力加速度,kg/s2。
当测区处于验潮站或水文站的有效作用距离范围内时,潮位htide的变化可以通过潮位观测获得,否则需通过潮位模型或其他方法获得。潮位是相对于某一深度或高程基准面确定的,经过潮汐改正后,即实现了相对水深向绝对高程的转换。
陈洋却温和地笑了:“知道吗?魔术就是场骗局,骗得过所有人就是最棒的魔术。我和师父联手的实景魔术你还满意吗?”
hi=h1i+h2i+htide=Pi/ρig+h2i+htide
波束脚印地理坐标的计算,需要用到垂直参考面下的波束到达角、传播时间和声速剖面3个参量。由于声线在海水中不是沿直线传播,而是在不同介质层的界面发生折射,因此波束在海水中的传播路径为一折线。为了得到波束脚印的真实位置,就必须沿着波束的实际传播路线跟踪波束,该过程为声线跟踪。通过声线跟踪得到波束投射点在船体坐标系中的坐标,其计算过程称为声线弯曲改正。在声线弯曲改正中,声速剖面起着十分重要的作用。由于温跃层的存在声速剖面变得异常复杂,而深拖系统由于其多波束安装位置的特点完美的避开了这一麻烦的计算过程,大大提高了声速测量的精度。
由于铠装电缆属于柔性结构,导致搭载于拖体上的多波束换能器的吃水是动态的,动吃水深度可通过压力传感器的数据读取得到。
与船载多波束测深相比,深拖多波束确定的深度h2i仅为多波束换能器面到达海底的距离,实际深度还应考虑换能器的吃水h1i,若潮位htide是根据某一深度基准面或高程基准面确定的,则波束在海底投射点的高程为
3.2 深拖浅地层剖面数据处理
深拖调查时,拖体高度的起伏变化会在浅地层剖面资料上造成海底虚假起伏。为了消除这种海底虚假起伏,将地形特征准确反映在浅地层剖面上,采取了如下方法进行海底归位矫正:先从多波束测深数据中提取浅地层剖面每道处的水深值,用实测声速剖面转换为时间间隔;然后利用软件拾取浅地层剖面海底的初至反射波,根据每道处的实际水深与海底初至波之间的关系计算出每道应延迟的时间,在每道采样数据前填充“空白”数据,或以时延方式写入浅地层剖面数据道头中[14-16]。
图4与图5展示的是在我国水深约150 m的某海域采集到的浅地层剖面处理前后的效果。采集海域地形平缓,基本没有起浮。
在采集过程中,由于深拖拖体在水下起伏变化,造成海底在浅地层剖面上产生了虚假起伏,海底面反射波倒置在海表面反射波之上(图4)。使用本文方法对该地区深拖系统采集的浅地层剖面数据进行海底归位矫正处理后,消除了浅地层剖面上的海底虚假起伏,使海表面反射信号和海底面反射信号各自归位,而且修正了地层内部发生的畸变(图5),有利于地层层位对比和解释分析。
浅地层剖面纵向采样时间间隔很小(数十微秒),而地震道中以整数毫秒为单位记录延迟,因精度不够会造成锯齿状海底及地层。选择将时间延迟转换为采样点的方法,避免了这种情况的发生,图像质量得到了大幅改善。
活性炭内部含有丰富的孔隙结构,各种孔对活性炭吸附性能的贡献有着很大的差异。一般认为,大孔容积在0.2~0.8 cm3/g,比表面积小于0.5 m2/g;中孔容积介于0.1~0.5 cm3/g,比表面积在20~70 m2/g,不超过总面积的5%;微孔容积介于0.2~0.6 cm3/g,比表面积在400~1 000 m2/g,甚至更高,占总面积的95%以上[7]。
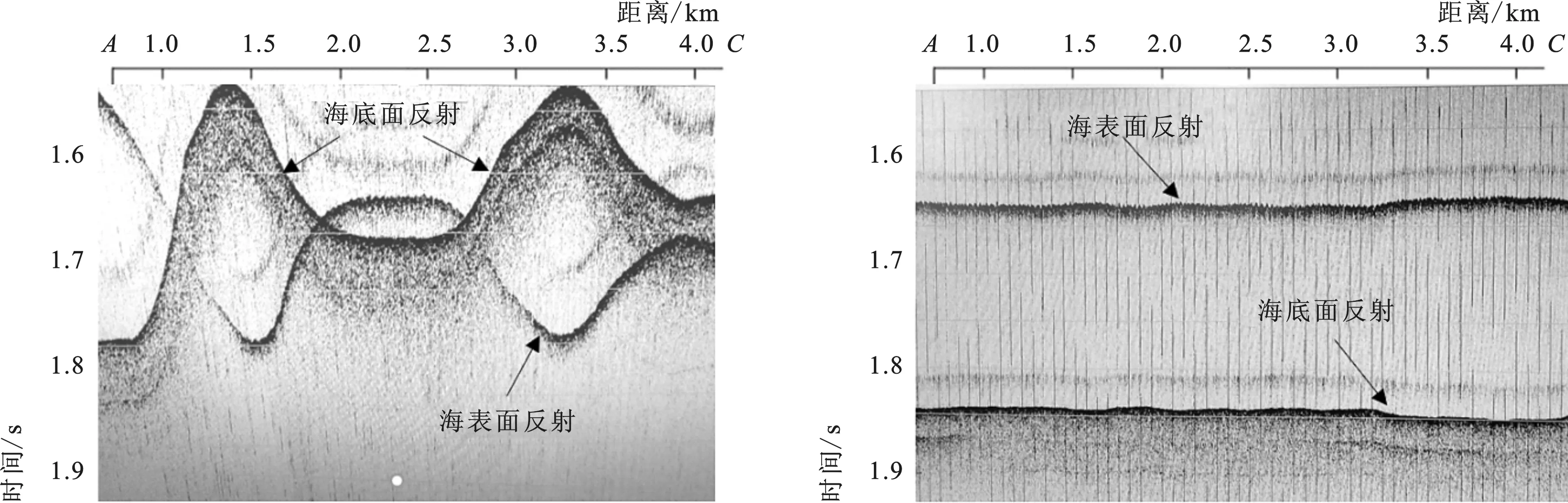
图4 拖体上下起伏时采集到的浅地层剖面图像
4 结语
作为深远海调查的一种重要手段,深拖系统具有可长航时作业、水下定位相对容易、回收便捷安全等特点,特别适用于海上目标搜寻,并且也难以被AUV等其他调查手段所取代。今后随着深远海调查需求的不断增多,深拖系统在国内的应用将会更加广泛。
营造舒适的工作环境、优化办公环境、物品放置有序、标识明确。同时培养护士积极向上的情感,提高心理承受能力。尽力丰富业余生活,比如科室一起郊游、召开谈心会、互送小卡片等,让护士得到归属感。
深拖系统的未来发展要从两方面加强,一是深拖装备及搭载设备要全面国产化,过度依赖进口会在关键技术上受制于人,而国产化的关键在于要深入了解深拖系统的部件组成和作业原理;二是要加大应用型人才的培养,受限于深拖系统的数量和应用机会,目前其使用经验与应用体系仍未发展成熟,需要进一步加大技术人才队伍的建设力度,尽快解决深拖系统在深远海应用中的关键技术问题,形成全面的深远海调查应用技术体系。
猜你喜欢
中国科技纵横(2022年17期)2022-10-25
海洋通报(2022年3期)2022-09-27
信息通信技术(2022年2期)2022-05-31
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
舰船科学技术(2020年3期)2020-04-22
北京航空航天大学学报(2016年6期)2016-11-16
故事大王(2016年7期)2016-09-22
地震研究(2014年3期)2014-02-27
儿童故事画报(2013年3期)2013-06-24
