
Ground behaviour analysis, support system design and construction strategies in deep hard rock mining - Justified in Western Australian's mines
2020-02-18 03:06BehroozRhimiMostfShrifzdehXiTingFeng
Behrooz Rhimi, Mostf Shrifzdeh, Xi-Ting Feng
a Department of Mining and Metallurgical Engineering, Western Australian School of Mines: Minerals, Energy and Chemical Engineering (WASM-MECE), Curtin University, Kalgoorlie, WA, 6430, Australia
b Key Laboratory of Ministry of Education for Safe Mining of Deep Metal Mines, Northeastern University, Shenyang,110819, China
Keywords:Ground management Support system design Sequential excavation Stress management Geotechnical monitoring Deep underground mines
A B S T R A C T Development of deep underground mining projects is crucial for optimum extraction of mineral deposits.The main challenges at great depth are high rock stress levels, seismic events, large-scale deformation,sudden failures and high temperatures that may cause abrupt and unpredictable instability and collapse over a large scale.In this paper,a ground control and management strategy was presented corresponding to the three stages of projects:strategic design,tactical design and operational design.Strategic design is results in preparing a broad plan and primary design for mining excavations. The tactical design is to provide detail design such as stabilisation methods.Operational design stage is related to monitoring and updating design parameters. The most effective ground control strategies in this stage are maintenance,rehabilitation, monitoring and contingency plan. Additionally, a new procedure for design of ground support systems for deep and hard rock was proposed. The main principles are: static and/or dynamic loading types,determination of loading sources,characterisation of geological conditions and the effects of orientation of major structures with openings, estimation of ground loading factor, identification of potential primary and secondary failures, utilisation of appropriate design analysis methods, estimation of depth failure,calculation of the static and/or dynamic demand ground support capacity,and selection of surface and reinforcement elements. Gravitational force is the dominant loading force in low-level stresses. In high stress level, failure mechanism becomes more complex in rock mass structures. In this condition, a variety of factors such as release of stored energy due to seismic events, stress concentration, and major structures influence on ground behaviour and judgement are very complicated.The key rock engineering schemes to minimise the risk of failures in high-stress levels at great depth involve depressurisation and quality control of materials.Microseismic and blast monitoring throughout the mining operations are required to control sudden failures. Proper excavation sequences in underground stopes based on top-down,bottom-up,centre-out and abutment-centre were discussed.Also,the performance of a ground support system was examined by field observation monitoring systems for controlling and modifying ground support elements. The important outcome of the research is that the proposed procedure of selecting ground support systems for static and dynamic situations was applied in several deep underground mines in Western Australia.Ground behaviour modes and failure mechanism were identified and assessed. Ground demand for static and dynamic conditions was estimated and an appropriate ground support system was selected and evaluated in site-specific conditions according to proposed method for ground support design at great depth. The stability of rock masses was confirmed,and the reliability of the design methodology for great depth and hard rock conditions was also justified.
1. Introduction
Underground mine development in a cost-effective manner at great depth poses some challenges for ground control and maintenance of stability of excavations. Distribution of field stresses and forces (static and dynamic) causes critically stressed rock,deformations and failures in the vicinity of the openings.The strength of rocks increases at great depth due to high confinement and it is removed with underground excavation, resulting in a considerable reduction in rock strength. Rapid change in rock strength,high field stress conditions,sources of static and dynamic loads and defects in geological structures can cause complex ground behaviours from the microscale, such as microcracks in rocks, to the large scale like a sudden failure (Sharifzadeh et al.,2017a). Deep mining is associated with geotechnical challenges related to sudden failure and large deformation in rock mass structures. The dominant factor of failure mechanism in deep mining is high induced stress/seismic events. Generally, depths more than 600 m are referred to as deep mining.
Stress concentration, seismicity, water pressure and temperature are the main hazards of fracturing in deep underground mines.These parameters can have influences on the behaviour of hard rock and cause violent failures such as rockburst, brittle failure,fault burst and spalling. Hazardous condition in the ground may lead to a delay in production, high-cost in rehabilitation, damage support and mining equipment,loss of ore reserves,and injury and fatalities of personnel.
The geotechnical challenges in underground excavations can be evaluated by collecting rock engineering data, considering sitespecific conditions and determining uncertainty in parameters.Application of appropriate mining methods, sequential excavation and ground support system is needed in underground engineering projects (Morissette et al., 2014).
Designs of ground support systems using traditional methods are mostly based on restraining the gravity of rock blocks surrounding excavation face, but in modern design, support elements should endure static and/or dynamic loading and large deformations in rock mass structures during the whole life of excavations (Rahimi and Sharifzadeh, 2017). Ground support demand for stabilising rock mass structures in hard rock and high stresses requires an estimate of energy demand of the rock and energy dissipation of support elements, especially in dynamic loading conditions (Feng and Hudson, 2011). Ground control and management deal with all geotechnical activities related to hazard recognition, understanding of failure mechanisms, and design of ground support systems to provide a safe environment economically in rock underground engineering projects.
Serviceability is utilised for underground openings where are used for service purposes such as mine access, ore drives and ventilation, and usually have medium-long term life. The most effective ground control strategy in this stage is maintenance,rehabilitation and monitoring.
The purpose of this article is to propose a practical geotechnical strategy for ground management in deep and hard rock conditions during the design, construction and serviceability stages of underground mining projects. Critical geotechnical steps for mitigation of risks and stabilisation of rock masses in deep underground excavations are as follows:
(1) Optimise layout of openings based on major geological structures and orientation of the principal stresses;
(2) Modify sequential excavation and extraction rate;
(3) Define ground control and management strategies for small/large deformation based on potential failure modes;
(4) Design natural ground as a local support system, such as pillars in underground mining methods;
(5) Design and utilise backfilling methods as a regional support system in mines; and
(6) Design and apply surface and reinforcement support devices for unstable rocks.
Additionally, a practical methodology for the design of ground support systems in deep,hard rock and high-stress conditions was proposed with regard to geological structural conditions, loading conditions(static and/or dynamic),loading factor(the ratio of rock mass strength to major field stress),and primary/secondary failure modes.Several deep underground mines in Western Australia were used as case studies and some results were presented in this paper.
2. Governing factors in ground behaviour and its management strategy
Ground control and management deal with techniques to solve geotechnical problems of instability in underground mining operations. The techniques include plan, design and method of operations to avoid workplace injuries and equipment damage due to the risk of rock failure. The geotechnical aims of a ground control and management plan in underground mining stopes are listed below:
(1) To define a hazard control program by evaluating,designing and monitoring rock mass structures;
(2) To extract mineral resources in a safe and economical manner;and
(3) To develop a process for hazard identification and failure mechanism diagnosis supported by a training program for personnel.
Diagnosis of failure modes and their mechanism is fundamental in ground control planning.Collected data from site investigations,engineering geological survey and laboratory/field tests are used for characterisation of rock mass structures and then the failure mechanism is diagnosed based on in situ rock stresses,hydrological and project conditions.
Fig.1 presents a ground management strategy in deep underground mining projects. The main steps of the scheme are design,construction and serviceability. The design step of ground management is associated with input geological and geotechnical data from site investigations, engineering geological mapping and results of laboratory/field tests. Design analysis of an underground excavation is carried out based on ground behaviour, failure mechanisms and project conditions, and results in location and project orientation, excavation method, sequential excavation,extraction rate,and selecting ground support systems.The practical approach of ground control and management during the construction stage is determination of standard procedures for geotechnical activities, provision of required equipment with competent personnel,quality control of materials,identification of geotechnical hazards, safety analysis before ground failure occurs,and inspection/monitoring of ground support performance. The appropriate approach for the projects during serviceability is conducted by maintenance and rehabilitation of ground support failure, load deformation measurements and preparation of a contingency plan.
Deep underground mining projects are designed and developed in the following stages:
(1) Strategic design: This is a type of primary design and preparing broad plan for the mines site such as the location of access and underground stopes;
(2) Tactical design:Tactical object is to provide the detail design of projects for example stability analysis of rock mass in underground excavations and selecting ground support system before operational stage at the mines; and

Fig.1. Ground management strategies in deep underground excavations.
(3) Operational design: This is related to monitoring and updated design parameters through observational methods and monitoring system.
A wide range of parameters in rock mass compositions,ground behaviours modes,failure mechanisms and in situ stresses make it complex and uncertain in estimation of rock engineering properties,especially in seismically-active mines at great depth.In design phase, visualisation, interpretation, assessment of the real orientation and geometry of rock mass structures are difficult from direct observations to prepare geological and geotechnical model.Therefore, uncertainty and confidence in characterising rock mass structures, diagnosis of ground behaviour, failure mechanism, and ground support design are assumed. The possible engineering disasters from design phase encountered in construction stage could be a complex failure mechanism such as sudden failure and large deformation, inadequate and inappropriate ground support systems.Hence,ground control and management strategies should be accomplished in accordance with knowledge, experience and management to address the problems in mining operations. In serviceability stage, seismic events, stress concentration and corrosion of ground support systems may lead to damage to support devices and rock failures. A contingency plan with a monitoring system is required for evaluation of ground problems.
The major steps for ground control and management at great depth are listed as follows:
(1) Collect data from available evidences,observed features and seismic events;
(2) Identify potential geotechnical hazards;
(3) Analyse the hazards for ground management,and determine appropriate strategies such as smooth blasting method and install ground support system;
(4) Evaluate the effectiveness of multi-factor on ground conditions, especially time;
(5) Implement ground management strategies in hazard area;
(6) Conduct geotechnical monitoring and review the ground responses; and
(7) Update the strategies.
Geotechnical issues and ground control management should be considered during the whole lifetime of underground opening projects from the feasibility study stage to the final closure of a mine.
During the design phase of ground control and management,three approaches, i.e. project location and orientation, sequential excavation/excavation method/extraction rate,and ground support selection method, can significantly affect the type of ground behaviours and failure mechanisms in underground excavations. For example, suitable drill-and-blast design parameters can reduce damaged zones in rocks and result in satisfactory size fragmentation, cost-reduction in production and ground support equipment(Szwedzicki, 2003). These approaches will be briefly discussed in the following sections.
2.1. Project location and orientation
The layout of project location and orientation is situated based on the principal stress orientations,major structural defects in rock masses, excavation geometry, location of mineral resources, availability and accessibility of equipment, objective and purpose of projects, and location of mineral resources in mining projects.The angle between the orientation of an opening and major structures of rock masses influences the type of failure and mechanisms in underground mining activities (see Fig. 2). Theoretical results and practical implementations indicate that the perpendicular and parallel orientations of an opening with major structures are the most favourable and unfavourable in underground mining projects,respectively.Simple failure mechanisms,like tensile fracturing and shear failure, may combine and produce complex ground behaviours at different orientations of excavations,and the unfavourable orientation of discontinuities surrounds openings to reduce the bearing capacity of rock blocks and may lead to ground fall or sliding failure (Sharifzadeh et al., 2017a).
The axis of underground excavations also has influence on discontinuities inside rock masses and may affect fluid channels and flow rates in openings. Fluid flow can cause different types of ground behaviours and failure modes, for example, flowing and swelling phenomena.
The appropriate layout of location and orientation of excavations with regard to the orientation of dominant structures and principal stresses can reduce structural failure modes and consequently, the required ground support system for stabilising. As a result, an underground mining project is forecast to run at a low cost and have a high performance in such a situation.
2.2. Excavation method, sequences and extraction ratio
Excavation method has a significant influence on the engineering behaviour of rock masses. For example, drill-and-blast methods can provide safe environments compared to mechanical excavation methods at great depth and in hard rock conditions,because of a destressing effect and dissipation of stress concentrations in a fractured rock mass following blasting (Mazaira and Konicek, 2015). Strain energy accumulation in rock masses can be released by blasting method in excavation boundaries,which assist to diminish occurrence of sudden failure in hard rock.
Underground works require some access for stopes, extraction of mineral resources, transport of ore and waste materials, water/power supply, ventilation of main and temporary accesses,drainage, transport of personnel and equipment. Typical underground mining access is shown in Fig. 3. Excavations in underground mining projects are divided into the following two parts(Brady and Brown, 2006):

Fig. 2. The influence of discontinuity orientations and dips with the axis of excavations.

Fig. 3. Typical underground mine infrastructures and accesses (Atlas Copco, 2007).
· Underground excavations for service purposes include mine access,ore drives,ventilation, crusher chambers and spaces for underground workshops.These types of openings have mostly a medium-to long-term life; and
· Underground excavations for production purposes such as underground stopes, stop access, and service ways. They have mostly a short-term life and are temporary.
Mining projects at great depth are developed using various excavations such as vertical shafts, inclined ramps, horizontal drifts, fuel stores, explosive magazines, mining stopes, fuel stores and pump houses. The type and geometry of mining excavations have influences on the method and sequences of openings. The excavations for production purposes are usually in highly stress concentration areas,and they are typically a type of large span with short-term lifetime. Excavations for service purposes are usually small-medium span with medium- to long-term life. For example,the dimensions of drifts and ramps are selected based on equipment,ventilation,walkways and other facilities.The dimension can change from 2.2 m to 6 m, or 5 m2to 25 m2(Atlas Copco, 2007).These excavations are generally far from mining-induced zones.The challenges of excavation phase in openings for service purposes are generally less than production purposes.
Excavation sequence in a mining operation is described by the extraction of the orebody in an underground mining operation in order to achieve a high extraction rate of the orebody with minimal ground problems. Post-excavation stress can be reduced by applying an appropriate excavation method, sequence and extraction rate in underground openings (Sharifzadeh et al., 2013). A series of individual stopes is excavated in a safe and economical manner.Sequences in underground operations can be divided into primary, secondary and third priorities. The first priority of sequential panels or stopes is usually designed and extracted in high-grade regions of the orebody in consideration of target products in mine planning, field stresses, stability of rock masses,dimension of stopes, and backfilling methods. The primary panels or stopes are excavated and then filled with backfill materials for two vertical lifts before extracting secondary and third priorities of stopes. Fig. 4 shows a schematic of sequential excavations in underground stopping. The numbers on Fig. 4b and c show the sequences of excavations. According to the figure, sequential excavations are used in sublevel stopping mining method as vertical mining in steeply inclined deposits. The method is more common in deep underground mines in Western Australia.
Generally, the excavation sequence dimension varies between 5-30 m width,15-50 m length and 15-100 m height in Australia.Sequential excavation in mining operations can be developed as top-down, bottom-up, centre-out and abutment-centre (Ghasemi,2012). The dimension of stopes in sequential excavation affects mining operation costs, stability of rock masses and failure mechanisms.
2.3. Ground supports in underground mines
Ground supports provide a strong zone in unstable rocks and reduce a certain amount of rock deformation to avoid immature failure. Stabilisation of the ground in underground works can be accomplished by natural or artificial ground support methods.Natural ground support approaches like room-and-pillar methods are useful in medium-hard rock conditions, low-medium stress levels and short-medium term life in excavations.Artificial ground support devices are mainly divided into surface rock support and rock reinforcement elements. Surface support tools are applied on the surface and external parts of rock mass structures. Rock reinforcements are installed in the internal part of rock masses. The usual surface and reinforcement devices used in underground mining projects are rock bolts, cable bolts, shotcrete, concrete lining, strapping, mesh, timber sets, steel sets, hydraulic props,yielding sets and mesh (MOSHAB, 1999). Backfilling material method is a practical technique for sublevel stopping as a local support system in large-scale openings in mining projects. Stress level, density, particle size, porosity, strain level and proportion of cementation are assessed to design backfill materials.

Fig.4. Sequential excavation in(a)a tunnel,(b)an underground mine with bottom-up and centre-out method, and (c) an underground mine with bottom-up sequences method (The number shows the sequences of excavations).
Instability of rock masses is derived from geotechnical structural defects in rocks and static/dynamic loading conditions due to stress concentration,seismic events and released energy,drilling and blasting,gravitation,groundwater and temperature.The stabilisation process for rock mass structures in underground openings is as follows:
· Determine project conditions and purposes;
· Identify major geotechnical defects and failure mechanisms in rocks;
· Identify main types of loading (static/dynamic) surrounding excavations and estimate their intensities;
· Analyse ground condition and estimate rock mass deformations;
· Select the type of ground support approaches: natural ground support and/or artificial ground support systems;
· Select the types of surface and reinforcement support devices;and
· Control the ground-support performance.
The application of ground support and reinforcement systems has to provide stable conditions in rock mass structures through reinforcing, holding and retaining functions (Kaiser et al., 1996).Fig. 5 shows the use of support devices in different parts when encountering failure zones in an underground excavation.Installing rock bolts in a small damaged zone may provide stability in excavation. Large-scale damaged zones require the use of different layers of support systems as described below(dependent on the loading condition and failure modes) (Li, 2017):
· Part 1:installing rock bolts to reinforce and strengthen fractured rock by forcing rock blocks together;
· Part 2: using inner support systems (shotcrete, mesh, etc.) for retaining function;
· Part 3: cable bolting to provide an effective holding function in loosened blocks; and
· Part 4: implementation of outer surface support devices like steel sets and casting concrete, which is more applicable for long-term life excavations.
Ground support systems at great depth and high-stress conditions are evaluated and designed by practical, numerical and observational methods.

Fig. 5. Different types of ground support devices in a failure zone: (a) rock bolting in small damaged zone; and (b) large damaged zone with (1) rock bolting, (2) retaining by inner surface support devices, (3) cable bolting, and (4) outer surface support devices (Li, 2017).
3. Ground support analyses and design strategies
The techniques for ground improvement by support elements are sewing rock blocks together, unifying the zone of failure,avoiding fracturing progression, controlling deformation and strengthening rock mass structures. A number of factors including availability, capacity, simplicity, cost-effectiveness, installation method,and energy absorption should be considered in the design.
Different loading conditions surrounding an excavation require different types of ground support systems (Rahimi et al., 2014). In general, the effective loads on an excavation surface are static, dynamic and a combination of them. The origins of static loading are gravity, in situ/induced stress, tectonic activities, groundwater, residual stresses, and temperature. Seismic events, strain burst, fault slip,pillar slip,gravity collapse,loading/unloading rate,and blasting are the main sources of dynamic loading in underground openings.
At great depth and high stress conditions, seismic hazard changes with mining and excavation sequence. Assessment of seismic events and risks can be carried out by collecting data from spatial seismic event clusters, magnitude-frequency of events,history of apparent stress-time,focal mechanism,estimating peak particle velocity, and decay rates of post firing event methods(Knobben,2017). These methods need plenty of knowledge,experience and training in the seismic field. Table 1 presents a seismic hazard scale (SHS) for mines of Western Australia. This parameter considers quantification of seismic events recorded in geological structures, underground stopes and mining operations like blasting,based on the rate of magnitude events and b-value parameter from the Gutenburg-Richter relation (Hudyma and Potvin, 2004).SHS is applicable for reflected seismic events, up to about Richter magnitude+3, from failures of rock structures at the mine site.
Support capacity depends on loading mode,loading rate,share of loads between different support elements, displacement of support system, and energy absorbing capacity (Kaiser and Cai,2012). The capacity of ground support system is evaluated with regard to availability and combination of support elements to act as an integrated system, including the type and amount of loads,displacements and energy demand, especially in dynamic loading conditions(Cai and Kaiser,2018).Fig.6 shows the design procedure of ground support system in deep underground mining projects.The main factors in the design are an estimation of depth failure and fracturing, demand ground support in static and dynamic conditions, and evaluation of rock support system capacity based on the load, displacement and energy absorption factors.
Ground support design based on static loading conditions is used in underground mining projects where the risk of seismic events is low.The typical ground support devices for static loading conditions are fibre-reinforced shotcrete,rock bolts and cable bolts(Jacobsson et al., 2013). Ground support design in a ground with dynamic loading conditions should include an absorbing kinetic energy factor derived from seismic events(Kaiser et al.,1996).The results of drop-weight tests indicate that about 25% and 75% of absorption of energy demand, respectively, belong to surface support and rock bolt devices in hard rock conditions. In soft rock conditions, this proportion is divided into 30% for rock bolts and 70% for surface support systems (Louchnikov and Sandy, 2017).Transferring the load from the surface to reinforcement ground devices is not critical in static conditions, whilst this point is a fundamental requirement in dynamic conditions to ensure the performance of ground support systems.
3.1. Ground demand in static conditions
Ground support demand in static conditions is determined based on dead-weight and stress concentration in rock massessurrounding excavations and is estimated by Eq. (1) (Cai and Kaiser, 2018). Support elements increase the frictional forces of rock blocks, resistance to deformation of the fractured rock mass, and the support of the dead-weight surrounding an excavation.

Table 1 Seismic hazard scale (SHS) in the mines of Western Australia(Hudyma and Potvin,2004).
Ground demand(static condition) = ρgdf(1)
where ρ is the density of rock (t/m3), g is the gravitational acceleration (m/s2), and dfis the displacement of rock/depth of failure(m).
where C is the parameter with value about 0.2-0.3 for design purposes, R is the distance to the source, R0= α(mL+1.5), mLis the magnitude event, and α is the parameter with value of 0.53-1.14.
Fig. 7 shows an estimation of failure depth in the dynamic rupture mechanism based on empirical data from previous projects.In Fig.7,CI is the crack initiation threshold stress in rocks and is determined from laboratory tests. CI is about 0.4-0.5 UCS for crystalline rocks (Diederichs, 2017), and UCS is the uniaxial compressive stress.
The depth of failure where there is spalling behaviour and for a circular tunnel is estimated by (Diederichs,2017):
3.2. Ground demand in dynamic conditions
Dynamic support demand stabilises a rock mass under dynamic loading conditions and dynamic failure mechanisms, and is estimated by(Kaiser et al.,1996):


where m is the mass of ejected rock materials (t), v is the velocity(m/s),q is the constant factor for the effect of gravity on the ejected rock materials (m/s) (-1: floor, 0: wall, and 1: back), and d is the distance of ejected rock blocks (m).
The velocity v (peak particle velocity, PPV) can be estimated from numerical modelling or seismicity event data using Eq. (3)(Potvin et al., 2010):

where K is the stress ratio; CI is the crack initiation stress (for the case where there is no data available,and CI=0.5UCS);and Rsis the radius or half-span of an underground excavation.
The capacity of energy absorption of various surfaces and reinforcement support devices is shown in Table 2 and Fig. 8,respectively.The implication is that yielding support devices such as Durbar, Cone bolt, Garford bolt and D-bolt are effective in dynamic and tensile loading, rockburst, and squeezing behaviour.Installing further rock bolts at an acute angle(less than 30°)to the orientation of discontinuities is a solution to reducing shear failure(Stacey, 2016).
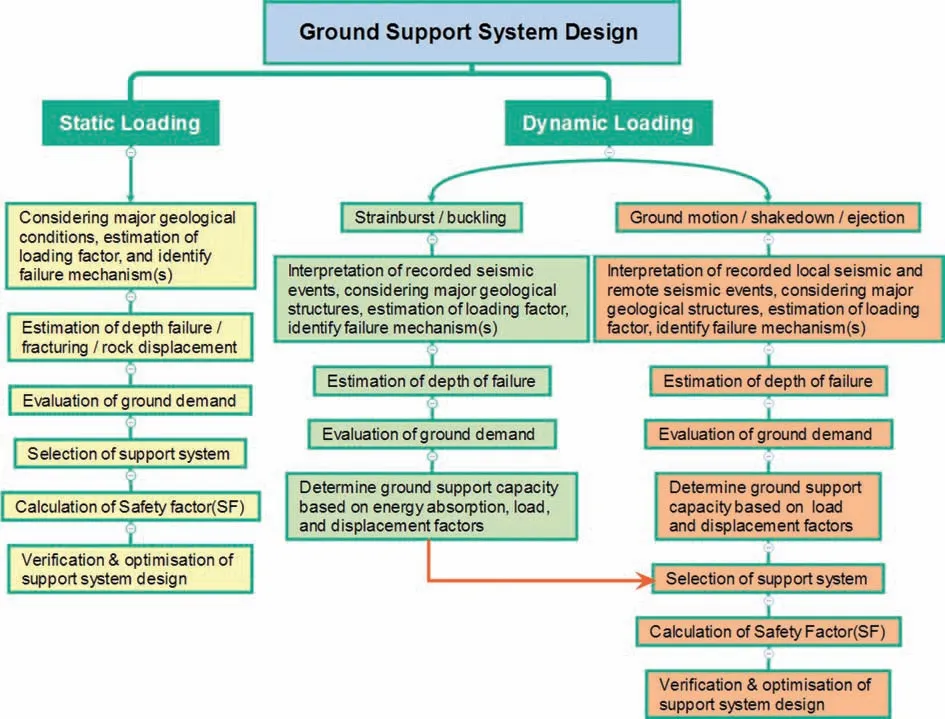
Fig. 6. Ground support design in deep underground mines.
The factor of safety is a key for stability analysis and design of a ground support surrounding a rock mass in underground structures. This parameter estimates the load capacity of support devices under static and dynamic loading conditions.The factor of safety (Fs) is estimated by
A factor of safety of more than one may provide stability under dynamic loading conditions. However, ground control and management should be accompanied with field measure-

where Eab=mv2;n is the number of rock bolts;Eejis the kinetic energy from ejected rocks; ueqis the rock displacement at equilibrium; umaxis the maximum allowable displacement; and uultis the ultimate displacement.
The required long-term factor of safety is between 1.5 and 3.At high-stress levels and soft-medium rock strength conditions,squeezing behaviour may occur with high-stress deformation.Critical displacement (ur) is a suitable parameter to calculate the factor of safety where there is a squeezing behaviour. In addition,under dynamic loading conditions,the capacity of ground support devices for absorbing energy should be higher than the ejected kinetic energy of rock masses. The ratio of energy absorption capacity by ground support devices to the kinetic energy of ejected rocks in a dynamic loading condition is used as the factor of safety in burst-prone rocks (Li, 2017).ments to update ground support systems with any significant changes in the ground condition like the rate of seismic events.
Table 3 presents the design principles and a procedure for ground support and reinforcement in deep and hard rock conditions. The most effective steps in the design of ground support systems are as follows.
(1) Identification of the loading types:
· Static loading, and
· Dynamic loading.
(2) Determination of the main source of loading:
· Origin of static loading: Gravity, in situ/induced stress,tectonic activities, groundwater, residual stresses and temperature; and

Fig.7. The estimation of depth failure in a dynamic loading condition(Diederichs and Martin, 2010).

Table 2 The capacity for energy absorption of different surface support elements(Louchnikov and Sandy, 2017).
· Origin of dynamic loading: Seismic events, strain burst,fault slip, pillar burst, gravity collapse, loading/unloading rate,blasting and earthquake.
(3) Geological structural condition:
· Description of the majority of the geological structure:Massive rock, moderately jointed/blocky/folded rock,highly jointed/disintegrated rock;
· Favourability and unfavourability of major structures in openings;
· Estimation of the block size surrounding openings; and
· Determination of continuity factor (CF) in the ground.
(4) Estimation of the loading factor

· LF >2 (Low level),
· 1 <LF <2 (Medium level), and
· LF <1 (High level).
(5) Identification of potential failure based on loading type,loading source, major geological structural condition and loading factor:
· Primary failures, and
· Secondary failures.
(6) Use of appropriate analysis and design methods based on failure modes in static and/or dynamic conditions.
(7) Selection of ground support systems(natural ground and/or artificial devices)in accordance with the required life term of excavations.
The lifespan of underground openings can be divided into three groups based on their service purposes and uses:
(1) Short-service life (less than 6 months), for example, mine stopes and temporary access;
(2) Medium-service life (more than 6 months and less than 3 years), such as ore drive access and exploration tunnel; and
(3) Long-service life(more than 3 years)like decline,road tunnel and underground cavern.
The ground support and reinforcement system should be selected with regard to durability and service life of underground excavations. Temporary support systems or natural ground are suitable for short-term service lifetime, and permanent support systems are used in medium- or long-term.

Fig. 8. Energy absorption capacity of various reinforcement devices (Masoudi and Sharifzadeh, 2018).

?

?

Table 3 (continued)Loading types Origin of loading Geological structural condition Load factor Potential failures Appropriate analysis and design methods Suggested ground support system Preliminary Secondary Dynamic · Seismic events· Strain burst· Fault slip· Pillar burst· Gravity collapse· Loading/unloading rate· Blasting· Earthquake Massive rock GSI >70 Q′ >40 Bs >10 m 3 CF <3 σcm/σ1 >2 Seismicity damage, strain burst, tensile failure,Block fall, sliding failure, brittle failure, blast damage, rock ejection,shear failure, pooping/shucking rock, sudden failure, pillar burst Observational methods, engineering judgement, finite element methods,distinct element methods, fuzzy logic,energy release rate analysis, rock burst tendency index, local energy release rate, integrate system approaches, soft computations Retaining rock mass with wire mesh,reinforced with strong yielding rockbolts and grouted rebar, steel fibre reinforced shotcrete, split sets in minor dynamic loading, high density cable bolting in high level of seismic events,flexible steel sets to absorb released energy, stabilizing pillars with dynamic bolts and mesh,leaving extra pillars,fibrecrete plus multi-layer mesh and dynamic bolts (D-bolt/Garfod bolt/Cone bolt with spacing less than 1-2 m),face and ore-drive meshed and used bolts/cable bolts, survive seismic and displacement monitoring 1 <σcm/σ1 <2 Seismicity damage, brittle failure, spalling, slabbing popping/shucking rock,sudden failure Block fall, sliding failure, bulking failure, blast damage, splitting failure, tensile failure, strain burst,pillar burst σcm/σ1 <1 Seismicity damage, brittle failure, server rock burst,rock ejection Block fall, brittle failure, shear failure, blast damage, splitting,pillar burst, strain burst Moderated jointed/blocky/folded rock Favourability and unfavourability of major structures(Fig.2)45 <GSI <70 4 <Q′ <40 100 dm3 <Bs <10 m 3 3 <CF <35 σcm/σ1 >2 Structure/seismicity induced failure, block fall,shear failure Toppling, block fall, sliding failure,wedge failure, blast damage, shear failure, splitting failure, large deformation, pillar failure Observational methods, engineering judgement, finite element methods,distinct element methods, fuzzy logic,failure approach index analysis, local energy release rate, integrate system approaches, soft computations,discontinuities deformation analysis,distinct elements methods Retaining rock mass with fibrecrete plus chain link mesh, reinforced with strong yielding rockbolts and grouted rebar, split sets in minor dynamic loading,high density cable bolting in high level of seismic events,flexible steel sets to absorb released energy and control deformation, using back fill as regional support, grouted rock bolts and cable bolts, Seismic monitoring and deformation control,reinforced pillars with fibrecrete and mesh 1 <σcm/σ1 <2 Stress/structure/seismicity induced failure, block fall,shear failure, tensile failure Block fall, progressive shear failure,brittle and shear failure, tensile failure, buckling failure, toppling failure, bending failure, pillar failure, cave in, large deformation σcm/σ1 <1 Stress/structure/seismicity induced failure, shear failure, large deformation,block fall Crushing and splitting of rock blocks,tensile failure,blast damage,strain burst, pillar burst, buckling failure, cave in, ravelling, flowing,pillar failure, large scale collapse Highly jointed/disintegrated rock GSI <45 Q′ <4 Bs <100 dm3 CF >35 σcm/σ1 >/σ1 <2 Structure/stress/seismicity induced failure, ground fall large deformation failure,shear failure ravelling,flowing Cave in, ground fall, chimney failure, notch failure, blast damage ground movement, shear failure splitting failure, shear failure, large strains, floor heave and sidewall closure, ravelling, flowing Observational methods, engineering judgement, finite element methods,distinct element methods, energy integrate system approaches, soft computations, discontinuity deformation analysis, shear stress analysis, finite element methods, soft computing, failure approach index analysis Reinforced rock mass with resin bolt/expansion shell/split sets/swellex/grouted cable bolts with spacing about 1 m, steel support with pre-tensioned rock bolts, for swelling condition: full-column grouted rock anchors with fibre reinforced shotcrete, for ravelling condition: steel support with struts, pre tensioned rock bolts with fiber reinforced shotcrete, steel sets are required for long-term support,using back fill as regional support in mining sequences,reinforced pillars with fibrecrete and mesh, monitoring rock mass deformation 1 <σcm 2 σcm/σ1 <1 Note: GSI: geological strength index; Q′ =RQDJn×Jr Ja; Continuity factor(CF) =Dimension of underground excavation(m)Dimension of rock block(m).

Fig. 9. Excessive stress management methods in rock damaged zone around excavation (Modified after Saharan and Mitri, 2011).
In deep and hard rock conditions where there is frequently changing behaviour, rapid variations of stress and deformation,energy accumulation in rock masses, and application of fibrecrete, yielding rock bolts, cable bolts and mesh are necessary to stabilise openings. Seismic and deformation monitoring could be a useful strategy to control ground behaviour during mining operations.
It should be mentioned that the proposed method in Table 3 is more applicable for strategic and tactical design of underground mine projects. Verification and optimisation of design parameters should be accomplished in operational design stage.
4. Underground mining and construction strategies
Underground mining excavations entail excavation methods,sequential excavation/extraction ratio, depressurisation, quality control of material,and installation of ground support systems.The main principles involved in the excavation or extraction phase are construction time, project conditions such as the geometry of stopes, and geological factors like faults and shear zones. Stress management and quality control of support elements considerably influence mining operations at great depth,which will be discussed in the following sections.
4.1. Stress management
Depressurisation or destressing is a typical method to control rock failures in deep and high-stress conditions.Ground stress and seismic events are inevitable in underground mining operations and may cause various failures at great depth, such as rockburst(Rahimi and Sharifzadeh,2017).Fig.9 shows different methods for reduction of rock failure due to excessive stresses.Destress blasting is used for fracturing rock zones to dissipate stored strain energy from rock masses in mining operations and underground constructions. The method is used to reduce the level of stress concentration, by creating fractures in the rock mass that cause a reduction in the elastic modulus of the rock mass, and enable the rock to carry high-stress conditions. Fig.10 shows a relocation of stress concentration level by destress blasting method surrounding an excavation. The effect of the destress blasting method can be evaluated by measuring some rock engineering parameters such as deformation of rock mass, stress magnitude changes, seismic effects, and changes in the elastic modulus (Mazaira and Konicek,2015). The technique is applied to manage rock hazards derived from high-stress conditions such as strain burst and rock ejection.
4.2. Support elements quality control
Quality control and assessment of materials are determined by the necessary quality level and quality grade. The quality level is described as the difference between the required geotechnical techniques including specifications and actual implanting work.Quality grade is the difference between standards and specifications required of companies and the quality of manufactured products. Quality control is assessed through a systematic examination and quality assurance from geotechnical activities to achieve planned objectives. Quality assurance of ground control management in underground mining projects includes verifying that the construction is being done in accordance with the design,checking the availability of equipment, personnel facilities and general resources, which can be summarised by the following tasks(Szwedzicki, 2003):
(1) Discussion with managers about related activities for ground control;
(2) Inspection of geotechnical activities in underground mines;
(3) Review of procedures of operational activities, standards,documents and critical tasks;
(4) Consideration, discussion and review of geotechnical record and input data on the design;
(5) Observation and monitoring of drilling, blasting, rock mass behaviour and failure modes; and
(6) Discussion with supervisors and operators about the identified issues and development activities.
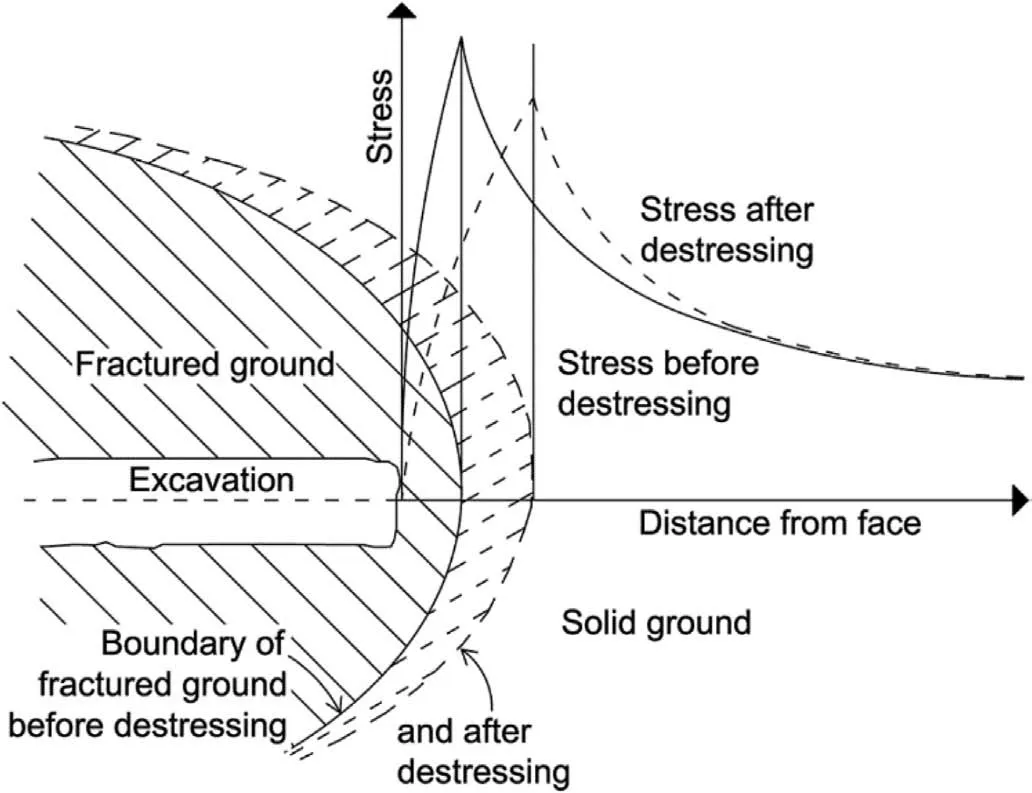
Fig.10. The effect of destress blasting method on rock zone surrounding an excavation(Mazaira and Konicek, 2015).
The common problems during the shotcreting process in underground mining projects are difficulty in achieving correct consistency(especially water/cement ratio,W/C),sprayability,proper storage and utilisation of admixtures, and use of the correct nozzle distance by operators (Talbot and Burke, 2013). Training of operators and supervisors is required to address these problems in projects. Also,there is a concern in using grouted rock bolts to fill pores in rock zones where there is groundwater which would lower the rock bolts'performance in the ground. Using recent technology, reflected ultrasonic wave signals can indicate any voids,and the quality of rock bolt installations can be improved(Yokota et al.,2013).Geotechnical quality control should be undertaken before installation to ensure that they are in accordance with the design parameters.
5. Monitoring ground-support system performance
Rock mass structures in deep underground mines have conditions that range from stabilisation to collapse in the following four steps:
(1) Stabilisation;
(2) Failure warnings, such as major joints, weakness zones,blasting damage zones, noise in rocks, seismic events and tectonised structures in ground;
(3) Ground movements, for example, fracturing, cracking,opening rock bolts, and sliding rock blocks; and
(4) Rock failure,such as sudden failure,ground fall and spalling.
Rock mass behaviour and its change are not always recognisable as warnings of failure.A procedure to recognise pre-failure of a rock mass can be useful for rock engineers in prediction of geotechnical failure and collapse, in order to avoid a fundamental loss.Geotechnical indicators such as faults and folds show that a rock mass has a potential for failure. Observational methods and monitoring system at great depth should be accomplished by collection, interpretation and analysis of this information to evaluate ground-support performance.
The performances of the ground support system under static and dynamic loadings, field stress conditions and seismic events are assessed by monitoring systems.A good monitoring system is using all available information from seismic event sources,seismic loading, and available data in rock mass structures and induced stress in field measurements.Installing of different types of instruments at great depth and high-stress levels,where there is a great potential for damage of the devices due to seismic events, allows different measurements like excavation deformation and seismic events, in order to evaluate ground support performance (Zhang et al., 2016). The main components of geotechnical observational methods are instrumentation, monitoring and back analysis, as shown in Fig. 11. There are various types of instrument devices, like extensometer, pressure cell and electrical piezometer, which can be used to measure the performances of support devices and ground parameters.Measurement of deformations and forces are most common in monitoring systems.

Fig.11. Geotechnical monitoring and design update procedure in underground excavations (Modified after Sharifzadeh et al., 2017b).
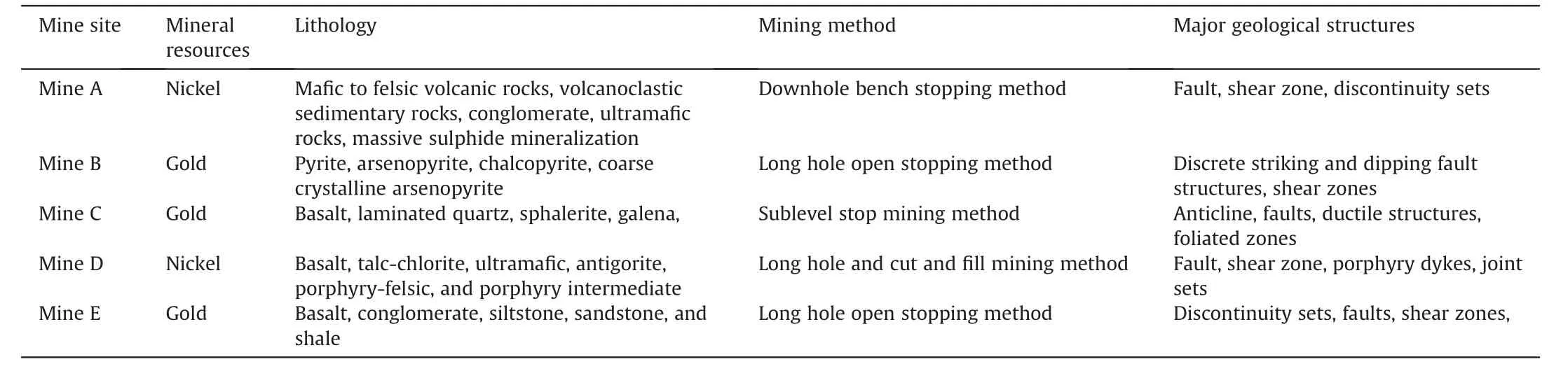
Table 4 The summary of geological information of mine case studies.
The design of monitoring plan deals with project conditions and geotechnical objectives. The mechanism of behaviour control of support elements and ground conditions determines the type of instrument devices and the location of their installation. The monitoring is performed by collecting data, processing,interpretation and analysis. Collected data from monitoring are used in two ways.In the first way,for abnormal status,for example,an excessive deformation,an immediate action may be required to prevent failure. Secondly, data analysis and interpretation are undertaken to find reliable values of design parameters.
Back analysis methods are used for confirmation of field stress and rock engineering parameters. Generally, back analysis techniques use two approaches: deterministic and non-deterministic.Deterministic methods such as the direct approach, inverse approach and graphic method,are based on the difference between system and model to minimise variability of the (deterministic)signal between them. Non-deterministic methods, like probabilistic methods and genetic algorithms,are based on the discrepancy between model and systems, which is considered as a nondeterministic signal (Sharifzadeh et al., 2017b).
Observation and monitoring methods can be used during the early stages of development of underground mining projects to acquire real ground behaviour and modify design parameters.Some of the benefits of monitoring and site observations are control of design uncertainties, achieving value-cost/time, reducing hazard failure in rock mass structures, and improving ground support systems.
6. Case examples from deep underground mines in Western Australia
6.1. Mine A
The Mine A geology consists of mafic to volcanic and volcanoclastic sedimentary, shale and conglomerate rocks. Major geological structures are western shear zone and eastern,horizontal fault and thrust fault. Sublevel stopping method is used for the extraction of mineral resources. Stope dimensions in the mine site are typically 30 m long and 20 m high.Pillars as natural ground support are implemented in low grade and uneconomic zones. Typical failure modes in the mine site are structural failures (ground fall and wedge failure)and stress-induced failure types(slabbing,pillar failure and squeezing failure).
6.2. Mine B
The gold mine is hosted in Devonian carbonaceous metasediment units.The mineralisation consists of pyrrhotite,arsenopyrite and chalcopyrite. The orebody is mined using the underground long-hole open stoping method. The main challenges associated with the mining operations are a high degree of jointing in the rock mass,several existing shear zones,instability of the rock mass and dilution of the ore body in stopes. The record of seismic events indicates that the mine area is in low to moderate levels of seismicity.The most failure modes are structural and induced stress failure modes.
6.3. Mine C
The gold mine deposit is hosted in mafic stratigraphical units,which are coarse grain and massive basalt units. Gold mineralisation is related to sphalerite, galena and scheelite mineralisation,and it is mostly hosted in laminated quartz veins. Three geotechnical domains at the mine site are hanging wall basalt,the ore body(dolerite,basalts and shear zones)and footwall basalts.The Q-value of the rock masses was estimated to be in the range of 4 to 30.Failure mechanisms in the rock masses include mining induced stress, gravity and blasting, and cause wedge failure, ground fall,slabbing,shear slip and pillar failure.The seismicity of the mine site is low to moderate.
6.4. Mine D
Nickel ore as the main resource is hosted in nickel-rich lava rivers and nickel placer deposits.The nickel ore contains a band of massive sulphide,overlain by matrix ore and disseminated ore.The main rock types are basalt, talc-chlorite ultramafic, antigorite ultramafic, porphyry-felsic and porphyry-intermediate. Mineral resources at the mine site are extracted by the long hole and cut-andfill mining methods. There are several faults, shear zones and porphyry dykes in the mine area.There is a low rate of groundwater inflow (3-5 m3/d) from the ore surface and hanging walls during the rainy seasons.Seismic events caused a sudden fracture,creating new joints and failures in rock zones surrounding excavations.Strain burst,pillar burst,fault slip,shear failure,floor heave,stressinduced failure and squeezing failure occurred during engineering operations.
6.5. Mine E
The gold deposit consists of multiple shallow dipping ore zones of gold mineralisation and is hosted by mafic and conglomerate.The main rock types are basalt, conglomerate, siltstone, sandstone and shale. Major structures at the mine site are discontinuity sets,fault zones and weakness zones.The quality of rock mass,based on the Q-system, was estimated to be between 2 and 19. Rock noise was recorded in underground stopes in some cases before the occurrence of rock failure. During mining operation, several rockfalls and rockbursts occurred. Failure modes at the mine site were classified into gravity,induced stress,and seismicity types.In some cases, unravelling occurred in rock zones with high degrees of jointing. Also, seismic events caused slabbing, strain bursts, rockbursts and ground falls.

Table 5 Rock engineering properties at deep underground mine case studies in Western Australia.

Fig.12. Some typical failures in deep underground mines in Western Australia: (a) ground fall, (b) rockburst, (c) wedge failure, (d) blocky undercutting, (e) bulking, and (f) pillar burst.
The summary of geological information and geotechnical properties in the mines sites are presented in Tables 4 and 5.Also,some typical failure modes that occurred in deep underground mines in Western Australia are shown in Fig.12. Typically, failure mechanisms at great depth could be classified into three groups:structural failure, induced stress/seismic failure, and operational failure mechanism. Ground fall (Fig. 12a) and wedge failure(Fig.12c) are a type of structural failure mechanism that is associated with existence of structures in rock masses.The failure occurs due to gravity and sliding rock blocks between discontinuities surfaces. Rockburst failure (Fig. 12b), blocky undercutting failure(Fig.12d),bulking failure(Fig.12e),and pillar burst failure(Fig.12f)are a type of induced stress/seismic failure mechanism.High stress concentration, seismic events and released stored energy from seismic events lead to rockburst failure.High stress level in ground condition results in occurrence of buckling failure.
The design of ground support systems for the case studies is evaluated based on the proposed method in Table 3. The main source of loading at the mine site was identified as gravity,tectonic activities, seismic events, fault slip, strain burst and blasting damage. The geological structural condition was mainly of moderately jointed/blocky rocks,and the GSI and Q-value were estimated in the range of 30-80 and 1-48,respectively.The results of the design of ground support system at some deep underground mines in Western Australia are summarised in Table 6. The loading factor(σcm/σ1), where σcmis between 50 MPa and 120 MPa, and σ1is about 40-70 MPa,is between 0.9 and 2.3.Therefore,the rock mass structures have the potential to suddenly fail. Site investigations and observations indicate that the primary failure modes are mostly of block fall, wedge failure, induced stress failure, shear failure, slabbing and rockburst failure modes. In addition, during mining operation, secondary failure modes like squeezing failure and pillar failure occurred due to seismic events, induced stresses and blasting damage in rock zones surrounding excavations.Ground support elements were selected based on the estimation of static and dynamic ground support demands in each mine site.Fibrecrete with mesh as a surface support system,friction bolt,split sets, and grouted rebars and cable bolts as reinforcement tools,were selected as ground support systems for stabilising rock mass structures. Fig.13 shows the results of numerical modelling of the main decline access with 5.2 m width and 5.7 m height in Mine C.Fig.13b is the estimation of plastic zone(failure zone)surrounding excavation, which is about 1.5 m. The numerical results demonstrate the reliability of failure depth estimation compared with empirical methods (1-1.5 m) and observational methods (0.5-1.2 m). Also, the ratio of safety factor/loading factor (σcm/σ1) is presented in Fig. 13c. The maximum displacement of rocks surrounding excavation was estimated 2.2 cm after installing ground support system (Fig.13d). The numerical results demonstrate stability of rock masses surrounding excavation after installation of ground support systems.

?

Fig.13. Numerical modelling of main decline of Mine C: (a) main decline access, (b) plastic zone, (c) loading factor (σcm/σ1), and (d) total displacement after installing ground support system.
7. Discussion and conclusions
Deep rock underground excavations are usually associated with high-stress environments and seismic events. Severe damage in rock mass structures and ground support systems may occur due to large magnitude seismic events, defects in rock mass structures,stress concentration, blasting damage and tectonic activities such as strike-slip faults. Utilisation of proper ground control and management strategy can avoid the risk of failure.A ground control and amendment strategy of deep hard rock was proposed in regard to the design, construction and serviceability stages of works.Collecting comprehensive data,diagnosis of hazard conditions and failure mechanisms, design analysis, and selecting stabilisation methods were conducted in the design phase. Determination of safe work procedures, training personnel, identification of hazard conditions, quality control and quality assurance of materials, and safety analysis before ground failure are essential in construction stage.Control of the ground condition during serviceability(short-,medium-and long-term)is focused on monitoring(seismic events and load-deformations), maintenance, rehabilitation, seismic monitoring, and contingency planning.
The critical factors in the design stage of deep underground mining projects are to establish suitable location and layout of openings; determination of suitable excavation method,sequential excavation and extraction ratio; and selection of proper ground support equipment for small- and/or large-scale deformation. Microseismic and blast monitoring throughout the mining operations are required to control sudden failures.Sequential excavation for mining purposes utilises the topdown, bottom-up, centre-out and abutment-centre methods to deal with stress concentration and instability in large-scale mine stopes.
In addition,a procedure for ground support design in deep and hard rock is presented.The main principles in the proposed method are as follows:
(1) Ground loading types and sources,
(2) Characterisation of the major geological structural condition,
(3) Determination of ground load factor,
(4) Identification of primary and secondary potential failure,
(5) Selection of appropriate design analysis for static and/or dynamic loading conditions,
(6) Estimation of static and/or dynamic support demand, and
(7) Selection of surface and reinforcement support elements based on their capacity for energy absorption and safety factor.
At low-stress levels, the dominant loading source is the gravitational force, and ground support elements should be selected based on their capacity for energy dissipation. The behaviour of rock masses and failure mechanism are complex in high rock stresses and dynamic loading conditions due to the released strain energy from seismic events,strain burst,fault slip and pillar burst.The support elements are selected on the basis of their capacity for energy absorption factor in rock mass structures.
Furthermore, field observational methods utilise instrumentation, monitoring and back analysis to control the performance of the ground-support system in rock underground projects. The typical monitoring system in deep underground mining methods is seismic monitoring and measurement of rock deformation surrounding excavations.
A number of deep underground mining projects in Western Australia were studied in this context. The mine sites have hard rock and high field stress. For ground support design, the geological structures were characterised and the potential failure modes were identified. Wedge failure, block fall, squeezing,rockburst, ravelling, pillar burst, slabbing and blast damage are the common types of failure at the mine sites. Also, the depth of failure based on observational methods, empirical methods and numerical methods were estimated in the range of 0.3-1.7 m in the main decline access with 5.2 m width and 5.7 m height.Static and dynamic ground support demands were calculated to be about 40 kN/m2and 11 kJ/m2, respectively. Fibrecrete with mesh was selected as a surface support system,and cable bolt,split sets,friction bolt and D-bolt were selected as reinforcement systems in the rock masses.The applied ground support systems at the mine sites provide stable rock mass structures and a safe environment during mining operations.
Declaration of Competing Interest
The authors wish to confirm that there are no known conflicts of interest associated with this publication and there has been no significant financial support for this work that could have influenced its outcome.
Acknowledgments
The research was supported by Curtin International Postgraduate Scholarship (CIPRS)/Department of Mining and Metallurgy Scholarship. This study is also partly supported by National Natural Science Foundation of China the 111 Project under grant Nos.51839003 and B17009.
 Journal of Rock Mechanics and Geotechnical Engineering2020年1期
Journal of Rock Mechanics and Geotechnical Engineering2020年1期
- Journal of Rock Mechanics and Geotechnical Engineering的其它文章
- On the use of 1g physical models for ground movements and soil-structure interaction problems
- Prediction of TBM jamming risk in squeezing grounds using Bayesian and artificial neural networks
- Multi-scale modelling of gas flow in nanoscale pore space with fractures
- Three-dimensional double-rough-walled modeling of fluid flow through self-affine shear fractures
- Numerical study on tensile failures of heterogeneous rocks
- Stability assessment of landslide-prone road cut rock slopes in Himalayan terrain: A finite element method based approach