
一种基于边缘特征提取的开关状态检测算法
2020-02-04 06:33徐丽华
电子技术与软件工程 2020年21期
徐丽华
(国网新疆电科院设备技术中心 新疆维吾尔自治区乌鲁木齐市 830000)
随着我国电网建设的不断升级与发展,随着通信、检测、维修技术的智能化升级,电网的智能化巡检技术研究逐渐成为热门[1-3],其中变电站的设备工作状态的监督检查的重要性与日俱增[4]。但是,我国幅员辽阔,电网的广泛分布导致复杂地理环境中的变电设备监测巡查需要投入大量的人力成本,且人员在偏远地区的后勤与安全保障成本高昂,而将其全部替换为新式的智能设备成本昂贵、工程量浩大,所以目前的主流的改进思路是在偏远电站部署适当的监测设备,降低人力成本,如视频监控方式。
但是,电力设备种类繁多,对每个设备均部署相关设备进行监测会带来三个问题:
(1)数据传输量过大,变电站中有大量的设备进行检测;
(2)数据利用率低,设备的大段监控视频可能只有几帧是异常画面;
(3)人力监测效率低下,且成本昂贵。
故结合近年来物联网[5-6]的兴起与边缘计算[7-8]的不断发展的相关思路,可以针对单个器件进行智能异常检测,只将传输结果发送给监管部门,一方面降低了运算量,另一方面提高了监管效率。
为了降低运算量,大多采用针对图像进行模式识别的方式,例如利用直线检测检测断路器的开合状态,利用圆形检测[9]检测圆形器件等。
本文针对转换开关这种非常规图形,提出一种面向可见光图像的基于边缘特征提取的转换开关状态检测算法,其对采集的可见光图像进行数据筛选后提取边缘特征得到转换开关图像的分布散点,而后采用最小二乘法拟合出散点分布曲线,并根据曲线特征对转换开关的状态进行有效检测。
1 图像前期处理
在读取可见光图像后,为了降低图像的运算量,筛除无关信息,可以通过前期处理过滤图像信息,降低设备所需的运算,从而降低运算量,本文主要采用灰度化[10]和全局阈值二值化[11],将图像转换为二值矩阵,从而降低运算量。
1.1 灰度化
模式识别操作大多针对单通道图像,而现在的摄像机采集的往往是RGB 三通道图像,故需要将三通道图像尽可能保留信息地合并为单通道图像,因此就需要灰度化处理。一般采用的就是加权平均法,将每个点的RGB 三色分量以不同的权重加权后就可得到每个点的灰度值,从而将彩色图转为灰度图,具体公式如下:

式中:R、G、B 分别表示图像的红、绿、蓝三通道分量值,Gray 表示此像素点的灰度值。
1.2 全局阈值二值化
1.2.1 全局阈值二值化思路
在进行灰度化后,由于转换开关所处环境简单,可以通过二值化操作将灰度图像转为只包含0 和1 的二值化图片,进一步过滤数据,本文采用全局阈值二值化方法,计算公式如下:

图1:转换开关示例及行列方向

式中:gij表示灰度化后图中第i 行第j 列的像素点灰度,bij为此像素点二值化后结果,q 为全局阈值。
1.2.2 全局阈值选取
关于阈值q 的选择,一般使用最大类间方差法[12](OTSU),其主要思路是按图像的灰度特性,将图像分成背景和目标,S1和S2的类间方差越大,说明选用此阈值错分的可能性越小,故遍历图像中所存在的灰度值,根据图像灰度小于q 与大于q 分为S1和S2两部分,根据公式(3)和(4)计算每个分割阈值对应的类间方差,选取分割阈值,则此阈值的错分概率最小。阈值对应的类间方差计算公式如下:

式(3)中的t 是中间参数,式(4)中的f 就是图像分割的类间方差,s1和s2表示S1和S2分别占全图的比例,g1和g2表示S1和S2的平均灰度。
1.3 膨胀处理
为了过滤无关阴影,在得到二值化图像后需要对图像的白色区域进行适度的膨胀/侵蚀来消去阴影,从而凸显图像主要特征,本文研究转换开关,一般为黑色,而起所位于的电力屏柜往往为白色,故为了降低其他阴影的影响,对图像二值化后的白色区域进行膨胀处理,去除阴影。
2 边缘特征提取
2.1 canny边缘检测
在完成前期处理后,需要对图像的边缘进行提取,本文采用canny 边缘检测[13],其采用sobel 梯度算子计算出每个像素点周围3×3 区域图像的水平/竖直梯度,计算过程如下:

图2:图像预处理效果图
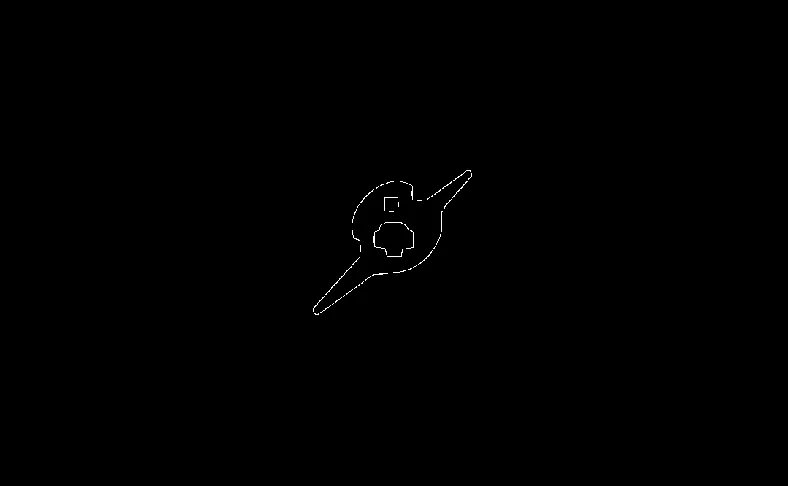
图3:canny 边缘检测效果图

图4:边缘点重心坐标检测效果图

式中:Gx表示水平sobel 算子,Gy表示竖直sobel 算子,A 表示单个3×3 的图像区域像素矩阵,*表示矩阵卷积,gx表示图像的横向梯度,gy表示图像的纵向梯度。
而后根据计算的横纵向梯度根据下式计算梯度幅值与相角:

式中:gx表示图像的横向梯度,gy表示图像的纵向梯度,g 表示梯度幅值,θ 表示梯度相角。
最后进行双阈值判定,判定公式如下:

式中:Tmax表示设定的阈值上限,Tmin表示设定的阈值下限,Mij为i 行j 列的像素点经过边缘检测后的结果,g 为此像素点对应的梯度幅值。
2.2 按行中心坐标提取
在将图像进行边缘检测后,可得宽高与原可见光图像相同的边缘矩阵M,矩阵中只有0,1。
由于转换开关形状不同于一般的几何图形,其近似视为菱形与圆形的叠加(参见图1)。
假定图像的尺寸为m×n,则规定位置特征提取向量为p0=[1 2……n-1 n]T,边界点累计向量为c=[1 1……1]nT,则按行中心列坐标向量计算如下:

式中:Mi表示M 矩阵的第i 行行向量,x•y 表示向量点乘,y0i表示按行中心列坐标向量第i 个元素。
2.3 散点线性拟合
假设y0中有r 个非零元素,舍去y0中的零元素及p0对应位置的元素,则可得到r 维向量p 和y,而后采用最小二乘法[14]对散点集合{(pi,yi)|i=1,2,……,r}进行线性拟合,拟合直线的斜率和偏置计算公式如下:
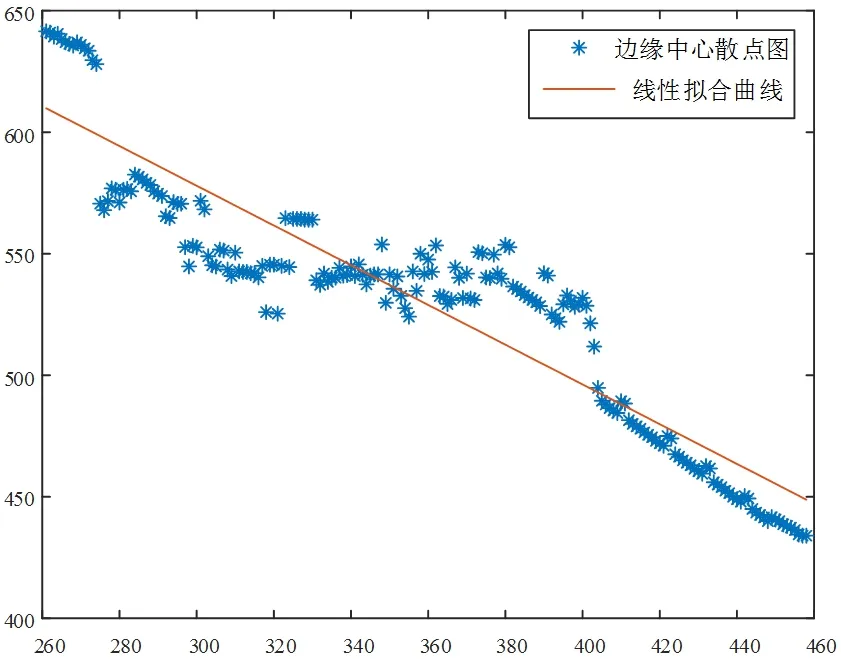
图5:散点图线性拟合效果图

图6:图像坐标定义示意图
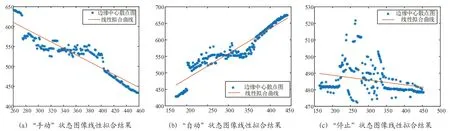
图7:转换开关三态图像边缘特征对比

表1:开关状态检测效果
式中:mean(•)表示求平均值函数,p 为位置特征提取向量,y为按行中心列坐标向量,k、b 分别为拟合出的直线的斜率、偏置。
最后,根据拟合直线的斜率,对转换开关的状态进行判定。
3 仿真实验结果
为了测试算法的有效性,本文在PC 端搭建仿真平台,对处于不同状态的转换开关的可见光图像进行测试,本算法电脑配置如下:
CPU:Intel i3-4150 CPU,主频3.50GHz;
内存:8.00 GB,频率1600 MHz;
硬盘 250 GB (S3YLNX0M527312K)
代码运行于安装在windows10教育版下的MATLAB R2019b上。
3.1 图像预处理
在读取原图后对图像依次进行灰度化、全局阈值二值化处理和像素膨胀处理,图像的处理结果如图2 各子图所示。
3.2 转换开关状态检测
3.2.1 边缘检测
经过全局阈值二值化后,采用双阈值canny 边缘检测将图2(d)子图转换为边缘二值化图像如图3。
3.2.2 按行列坐标中心定位
而后根据公式(8)(9)得到按行列坐标中心坐标,坐标中心检测结果如图4所示,其中红色散点为经过处理所得边缘的中心位置,可见基本上已经可以实现边缘中心点的坐标提取,结果有效。
3.2.3 散点拟合
在经过处理得到边缘点按行中心点坐标后,对其进行最小二乘法拟合,结果如图5所示,可见拟合曲线大致与散点走向一致。
注意,图5 中的散点图就是图4 中对应的散点图,没有经过任何的坐标变换,呈现的分布形状不同是由于图像的坐标描述是从左上角为原点,以向下为x 方向,向右为y 方向进行像素点的描述(可参考图6),当采用常见的第一象限坐标图绘制时相当于将图像绕左上角顶点逆时针旋转90°。
3.2.4 开关状态判定
当拍摄角度固定时,不同状态的转换开关的边缘中心散点拟合出来的曲线有较大的差别,据此可实现转换开关的状态检测。
本实验选用处于三个不同状态转换开关的可见光图像,对其进行一系列处理后进行边缘检测和边缘中心坐标计算,而后对中心坐标进行线性拟合,结果如图7所示。
据此设立判断条件对三个状态结果进行判定,设立判定结果和代码测试效果如表1所示。
可见:算法检测效果良好,且响应时间很短,说明其整体运算量小,与边缘设备的实际运算能力具有良好的适配性。
4 结论
本文提出了一种基于边缘特征提取的转换开关状态检测算法。该方法采用多种方式处理图像降低运算量并从中提取边缘特征信息作为转换开关状态检测的依据,实验表明,此算法计算量低,可靠性高,非常适用于偏远地区变电站器材的日常巡检监测,对智能电网与现代电力物联网的建构有一定的参考意义。
猜你喜欢
中小学课堂教学研究(2023年8期)2023-08-26
中学生理科应试(2019年3期)2019-07-08
上海大学学报(自然科学版)(2018年5期)2018-11-02
湖南教育·C版(2018年3期)2018-06-05
现代养生·下半月(2017年8期)2017-12-28
自动化学报(2017年11期)2017-04-04
福建中学数学(2016年7期)2016-12-03
美与时代·美术学刊(2015年6期)2015-05-30
