一种新型仿鸟扑翼机构
2020-01-19 07:35王红超杜小雷
唐山师范学院学报 2019年6期
王红超,杜小雷
计算机科学与自动化技术
一种新型仿鸟扑翼机构
王红超,杜小雷
(厦门海洋职业技术学院 机电工程系,福建 厦门 361000)
在分析目前常见的仿鸟扑翼机构的优缺点的基础上,根据自然界多数鸟类共同的飞行特征设计出一种新型的仿鸟扑翼机构。新型仿鸟扑翼机构的两侧扑翼能以不同速度和频率扑动,在两侧扑翼上产生不同的升力,使得扑翼机器人可以在突风等复杂气流环境下飞行。通过反馈控制,可以使两侧扑翼分别固定在各自的位置上,实现扑翼鸟在复杂气流环境下的滑翔飞行。内翼和外翼通过弹性器件连接,在扑翼扑动的过程中可以模仿真实鸟类的翅膀折叠动作以提高扑翼平均升力。
扑翼鸟;扑翼机构;飞行机器人;微型飞行器
扑翼飞行是几乎所有自然界具有飞行能力的生物采用的飞行方式,与固定翼飞行相比,这种方式通过翅膀的上下扑动产生升力和推力,具有效率高、尺寸小和重量轻的优点[1]。从古至今人们一直渴望能像鸟儿一样在空中飞翔,然而这一梦想至今没有实现,目前仅有部分扑翼机器人可以模仿鸟儿在无风或弱风的环境中通过人工手抛进行简单的飞行;降落也需要人工接住,否则就会摔到地上。自然界中鸟类翅膀的构造非常复杂,通常由骨骼、肌肉、羽毛和多个关节组成,上下扑动过程中通常伴随着翅膀的弦向的转动、展向的伸缩以及扭转[2],甚至某些羽毛都可以单独控制。鸟儿的每寸肌肤都可以感受气流,根据气流变化随时调整翅膀、尾翼、羽毛等身体各个部件的姿态以达到它们想要的飞行状态。自然界的鸟类经过亿万年的进化,形成了出色的飞行能力,其飞行效率、机动性都远远超出了目前所有的人造飞行器[2]。迄今为止人类还无法制造出具有和鸟类相同结构的翅膀,无法制造出随处都可感受气流的传感器,也无法完全模拟出鸟类扑翼的各种飞行姿态[1]。
目前报道出来的可以飞行的仿鸟扑翼机器人的扑翼机构几乎全部采用单一电机驱动,对称设计的双翼拍动机构保证左右翅膀同步扑动[3-6]。然而这种结构的飞行器在无风或弱风的环境下尚可飞行,在强风环境下或遇到突风干扰,两翼的升力差别很大,仅靠对称翅膀的扑动和尾翼的纠正无法维持飞行。康奈尔大学物理学家简·王说:“我们也许不该把昆虫看成小型飞机,而应该把它们看作空气中的游泳者。就像人游泳时通过将水推开来前进一样,翅膀拍动时,将空气推开,便得到一个空气的反作用力,即空气的阻力,这个阻力就是起飞的动力。这个观点同样适用于鸟类的飞行。”[7]我们观察到,真实的鸟类飞行状况非常复杂并且随时变化,在无风环境下直线飞行时两侧翅膀同步扑动;而在转弯或遇到侧风时两侧翅膀拍动的频率、瞬时速度是不同的;有时两侧翅膀会保持在不同角度滑翔……。根据自然界多数鸟类共同的飞行特征,设计了一种新型的仿鸟扑翼机械机构,每个翅膀采用一个电机驱动,可以更好地模拟真实鸟类复杂的飞行状况。
1 当前主要的仿鸟扑翼机器人机械结构
仿鸟微扑翼飞行器大多采用微电机,通过减速器和曲柄摇杆机构实现扑翼拍动[8]。微扑翼飞行器的翅翼一般固连在驱动机构摇杆上,不同的驱动机构决定了不同的扑翼飞行方式,而不同的扑翼方式也需要不同的驱动机构与之相适应,因此驱动机构不但是微扑翼飞行器的关键部件,还是体现其扑翼动作特征的机构[9]。鸟类在飞行的时候翅膀运动非常复杂,包括翅膀的上下扑动、翅膀折叠、翅膀仰俯、翅膀前后挥摆等,甚至一些羽毛都能在一定范围内随意控制姿态,飞行时翅膀的动作一般是以上几种运动的叠加。采用机械的方式多模仿一种鸟类的翅膀运动,就会增加一部分机械结构,使得扑翼鸟重量增加。故目前成功飞行的扑翼鸟大多只模仿鸟类翅膀的上下扑动,称为单自由度驱动机构。也有小部分扑翼鸟模仿了鸟类翅膀的上下扑动和翅膀折叠,称为两自由度驱动机构。常见的单自由度驱动机构有单曲柄双摇杆机构、齿轮摇杆机构等,常见的两自由度驱动机构一般采用齿轮摇杆机构[10]。
1.1 单曲柄双摇杆机构
单自由度驱动机构把电机的旋转运动转化为翅翼的上下扑动,其中曲柄摇杆驱动机构因其结构简单可靠,便于加工制造,可微化程度较高,在扑翼微型飞行器(MicroAirVehicle.简称MAV)中应用最广[11]。图1所示的单曲柄双摇杆机构是最简单的一种单自由度扑翼机构,市面上的橡皮筋动力扑翼鸟通常采用这种结构,如图2所示,具有成本低、重量轻、容易微小化的优点,但是两侧扑翼存在一定的相位差,对飞行稳定性有不利影响[12]。
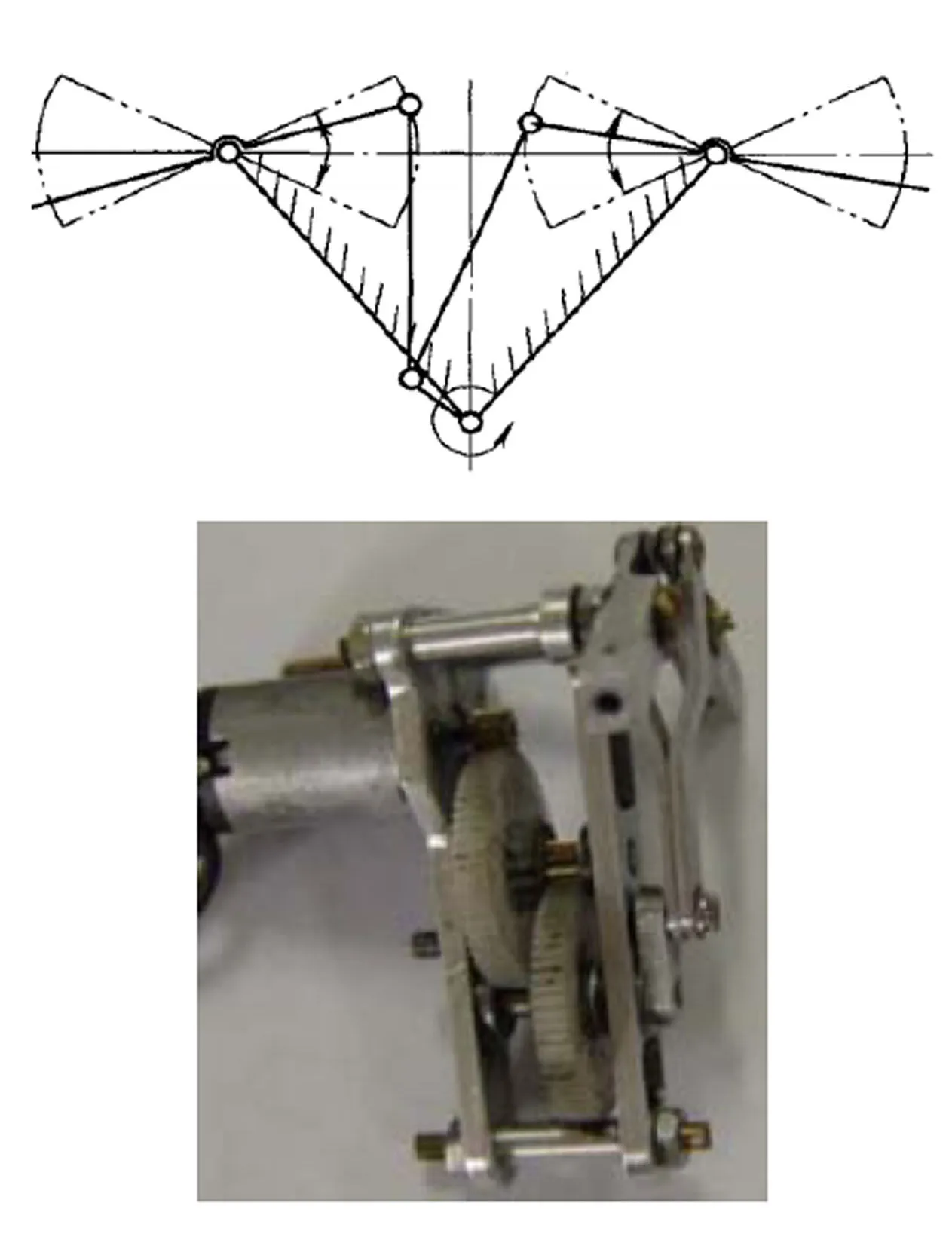
图1 一种单曲柄双摇杆机构示意图及实物图[13]

图2 橡皮筋动力扑翼鸟[14]
1.2 齿轮摇杆机构
齿轮摇杆机构的运动对称且摩擦较小,同时,还可以设计配套的高减速比的齿轮机构来执行,从而有利于减轻电机的重量,增大最终输出力矩[15]。电机旋转经齿轮减速后驱动两个对称齿轮转动,然后带动摇杆运动,最终实现扑翼杆上下扑动。在单自由度驱动机构中,齿轮摇杆机构应用最多,很多玩具遥控扑翼鸟采用这种驱动机构,如图3所示。为了提高推力、增加稳定性、减小惯性力,这些玩具扑翼鸟普遍采用双翼对拍方式。

图3 遥控玩具扑翼鸟及其翅膀驱动机构[16]
另有一种形式的齿轮摇杆机构,齿轮和扑动翼不在一个平面上,称之为空间四杆结构[17]。将齿轮安装在机身两侧,可以减小机身横截面积,从而减小前飞时的空气阻力,如图4所示。
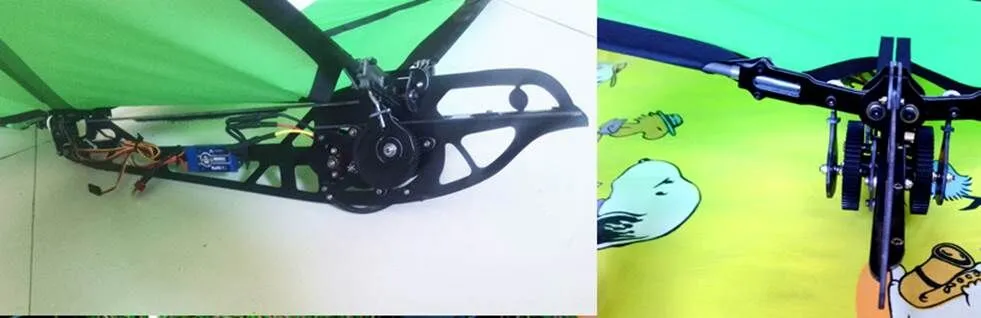
图4 空间四杆扑翼结构[18]
单自由度驱动机构结构简单,比较容易实现。但多数采用此种结构制作的扑翼鸟在上扑时产生的空气阻力与下扑时产生的升力大小差不多,大部分互相抵消,故一个周期内的平均升力相对比较小。这种扑翼鸟主要依靠柔性翅膀上下扑动产生推力,推力使得扑翼鸟前飞,翅膀相对气流有一个正的攻角,从而产生一部分升力。也有部分扑翼鸟的翅膀在下扑时翅膀不易变形,在上扑时可以产生柔性变形以减小空气阻力,使得一个周期内的平均升力相对稍高。
1.3 两自由度齿轮摇杆机构
两自由度齿轮摇杆机构的扑翼鸟不仅能模仿鸟类翅膀的上下扑动,还能模仿鸟类翅膀的折叠动作,在上扑时翅膀折叠以减小空气阻力,下扑时翅膀展平以提高升力。目前采用这种结构制作最成功的扑翼鸟是德国festo公司的smartbird,图5为smartbird的外观和其两自由度齿轮摇杆机构。除了翅膀折叠外,smartbird还实现了扑翼鸟外翼的仰俯动作[19],本文只分析其翅膀折叠动作。图6为这种机构的结构简图,图中杆件之间的小圆圈代表两杆之间可以转动。

图5 德国festo公司的smartbird及其扑翼机构[20]
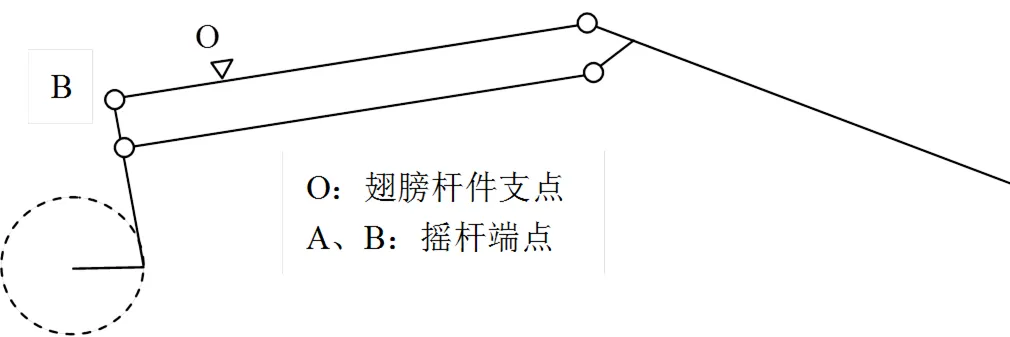
图6 两自由度齿轮摇杆机构简图
根据对真实鸟类飞行过程的观察,在鸟类扑翼的过程中有下扑和上提两个主要阶段。下扑阶段所用时间较多,展向弯度较小,翅膀面积尽可能增大,空气对翅膀的反作用力即升力也比较大;上提阶段所用时间较少,展向弯度较大,翅膀面积尽可能缩小,这是为了尽量减小翅膀上提时的空气阻力。为了便于模拟鸟类翅膀折叠的动作,可以将其简单划分成四个阶段:下扑阶段、弯曲阶段、上提阶段、展平阶段[21]。如图7以两自由度齿轮摇杆机构模拟鸟类的翅膀折叠动作,实线代表此阶段的起始位置,虚线代表此阶段的最终位置,箭头表示运动的方向。
(1)下扑阶段:翅膀保持平直从最高点开始向下扑至最低点。此阶段摇杆端点A的运动轨迹是以支点O为圆心,OA为半径的一段圆弧。
(2)弯曲阶段:在最低点翅膀内翼有一个小停顿,翅膀外翼向下折叠。此阶段摇杆端点A的运动轨迹是以摇杆端点B为圆心,BA为半径的一段圆弧。
(3)上提阶段:翅膀从最低点开始向上提至最高点,翅膀保持折叠姿态。此阶段摇杆端点A的运动轨迹是以支点O为圆心,OA为半径的一段圆弧。注意此阶段OA的长度与第(1)阶段OA的长度不同。
(4)展平阶段:在最高点,翅膀迅速展平,然后重复开始第一阶段。此阶段摇杆端点A的运动轨迹是以摇杆端点B为圆心,BA为半径的一段圆弧。
从以上分析可知,若要模拟鸟类匀速前飞时理想的翅膀扑动动作,摇杆端点A的运动轨迹应该是图7(4)所示的四段圆弧。然而,以smartbird为代表的两自由度齿轮摇杆机构的摇杆端点A固定在齿轮盘上,运动轨迹是一个圆形,故其在内翼下扑时外翼没有完全展平,减小了部分升力,在内翼上扑时外翼没有保持尽量收缩,增加了部分阻力。
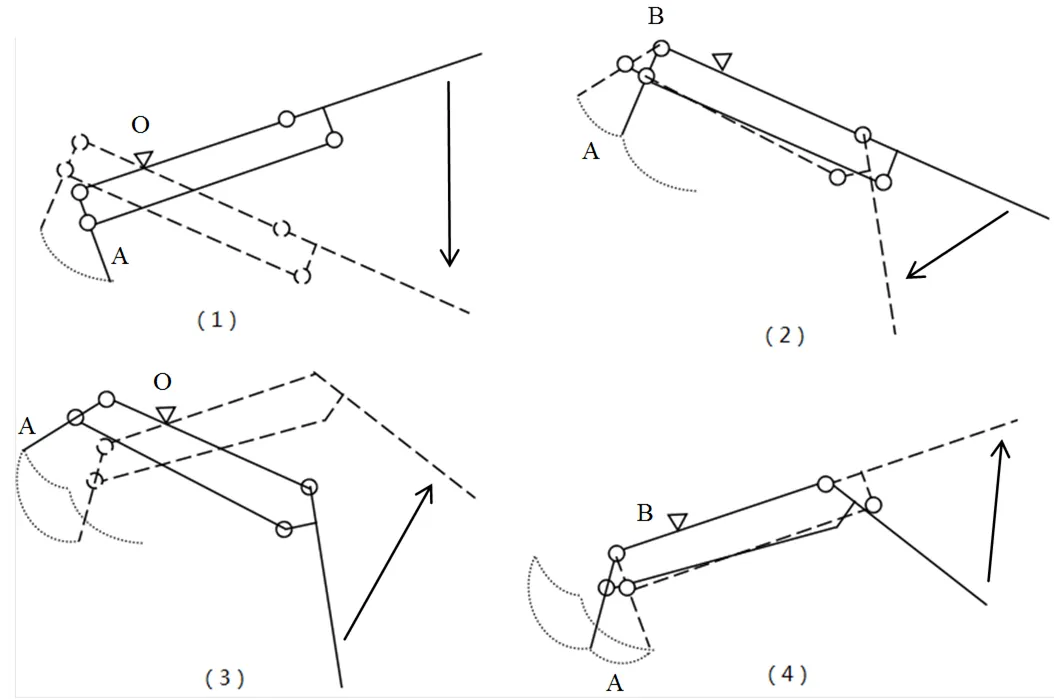
图7 两自由度齿轮摇杆机构理想化的运动路径
2 新型两自由度扑翼机构设计
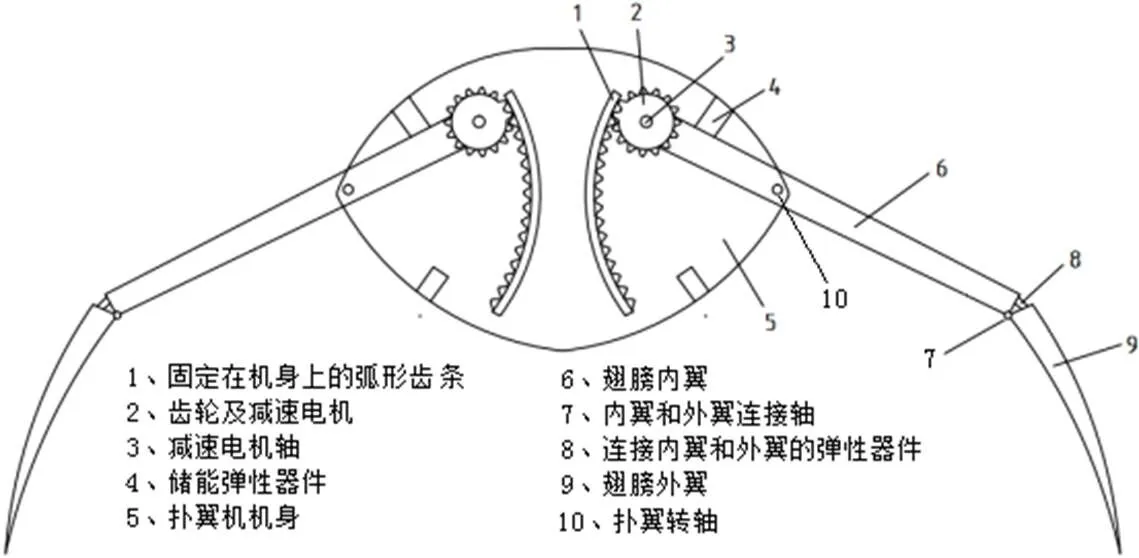
图8 新型仿鸟扑翼机扑翼机构
为克服上述几种常见的扑翼机构的缺点,设计出一种新型的仿鸟扑翼机的扑翼机构,如图8所示,包括扑翼(内翼6和外翼9)、驱动机构和鸟身。驱动机构包括减速电机、齿轮3和弧形齿条1,弧形齿条设有与齿轮对应的内齿。当驱动电机正转或反转时,通过齿轮和弧形齿条的齿合,可以使扑翼上下扑动。相比传统的仿鸟扑翼机构,新型机构具有如下几个优点:两侧翅膀可独立控制、平均升力更高、惯性力小、能量消耗更小等。
2.1 两侧翅膀可独立控制实现更接近真实鸟类的飞行动作
传统的仿鸟扑翼机构(包括smartbird在内)一般只有一个扑翼驱动电机,两侧翅膀及驱动机构对称设置,确保两侧翅膀同步扑动以产生基本相同的升力和推力,转向则依靠尾翼。采用这种机构的扑翼鸟可以在无风或弱风的环境下飞行,若遇到强风或突风干扰,两侧翅膀的升力将产生显著差别,仅靠对称翅膀的扑动和尾翼的纠正无法维持飞行,很容易发生坠机事故。
新型仿鸟扑翼驱动机构采用两个电机,分别控制两侧翅膀的扑动频率和瞬时速度。在无风的环境下水平前飞时,两侧翅膀同步扑动。在有强风干扰时,可以增加升力小的那侧翅膀的扑动频率,确保两侧翅膀产生大致相等的升力以维持机身平衡。在遭遇突风时,可以减小升力大的那侧翅膀的瞬时扑动速度,增加升力小的那侧翅膀的瞬时扑动速度,能让新型扑翼鸟在比较大的风速范围内维持飞行。在扑翼鸟上安装扑翼位置传感器,还可以精确控制每侧翅膀与机身的角度,实现在复杂气流环境下的滑翔等特殊飞行动作,如图9所示。
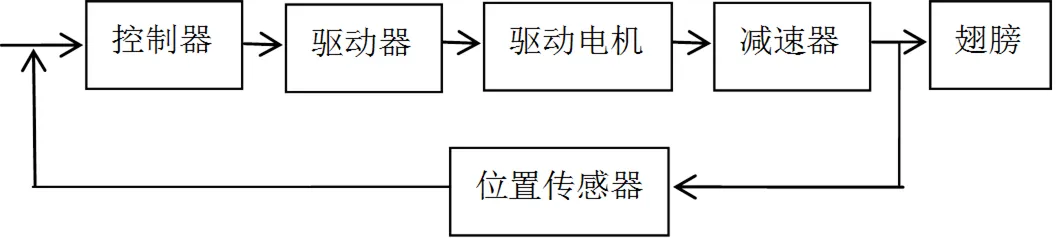
图9 翅膀位置反馈控制简图[22]
2.2 能量消耗小
真实鸟类的飞行效率很高,仅靠一点食物产生的化学能就可以长时间远距离的飞行。而目前成功飞行的仿鸟扑翼机一般采用电池提供能量,一般充满电只可维持飞行几分钟至几十分钟。最重要的原因是扑翼效率低,能量消耗大。
单自由度扑翼机的翅膀面积在上扑和下扑时基本相同,在上扑时白白损失了很多能量。一部分单自由度扑翼机的翅膀采用弧形翼型,减小了上扑时的能量损失,但是效果有限。
双自由度扑翼机在翅膀上扑时折叠起来,可以显著减小上扑时的阻力,减小了能量的损耗。但是以smartbird为代表的双自由度扑翼机的驱动电机连续旋转,翅膀从上扑转变为下扑和从下扑转变为上扑的过程中需要克服翅膀的惯性,这个过程会消耗很大一部分能量。
新型扑翼驱动机构的内翼6中部通过转轴10安装在扑翼机机身5上,在扑翼机机身上每侧扑翼都设有两个储能弹性器件4,当扑翼的端部摆动到靠近弧形齿条两端的极限位置时,内翼6与弹性器件4接触,使驱动电机断电,此时扑翼在惯性下继续摆动,将压缩弹性器件。弹性器件具有缓冲和储存能量的作用,当转变扑翼运动方向时将储存的能量释放出来,辅助减速电机推动扑翼向相反方向运动。新型扑翼驱动机构的这种设计减小了扑翼在转变运动方向时的能量损失。
smartbird的摇杆AB与翅膀的夹角不断变化,在一个扑动周期内,驱动力的力臂只在一个时刻等于OB,其余时间都小于OB,驱动力矩小于最优的值,增加了转轴的摩擦力,损失了一部分能量。而新型扑翼驱动机构的力臂始终等于转轴10到弧形齿条的距离,驱动力矩始终处于最优值,避免了因力臂变化造成的能量损失。
2.3 采用可折叠翅膀平均升力更高
根据以上的分析,以smartbird为代表的双自由度扑翼机的翅膀在上扑阶段并没有完全收缩,在下扑阶段也没有完全展平,故在减小上扑阻力(负升力)和增加下扑升力方面并没有做到最优。新型扑翼机构的内翼6和外翼9下部通过连接轴7连接在一起,上部通过若干弹性器件8(例如弹簧)连接。接下来分析新型扑翼机构驱动翅膀扑动的四个阶段:下扑阶段、弯曲阶段、上提阶段、展平阶段。
(1)下扑阶段:电机驱动内翼向下运动,在空气阻力和弹性器件拉力的作用下翅膀保持平直从最高点开始向下扑至最低点。
(2)弯曲阶段:在最低点翅膀内翼停止扑动,翅膀外翼由于惯性继续向下折叠,在弹性器件拉力的作用下逐渐停止。
(3)上提阶段:电机驱动内翼向上运动,内翼从最低点开始向上提至最高点,外翼在空气阻力和弹性器件拉力的共同作用下达到一个短暂的平衡状态,翅膀保持折叠姿态。
(4)展平阶段:在最高点内翼停止运动,外翼在弹簧拉力作用下快速展平,然后重复开始第一阶段。
通过以上分析可知,只要选择弹性系数合适的弹性器件,新型扑翼机构的翅膀在下扑时完全展平,在上扑时可以尽量折叠,故在一个扑动周期内具有比较高的平均升力。
3 结论
新型仿鸟扑翼驱动机构采用两个电机分别驱动两侧翅膀,可以使两侧翅膀具备不同的扑动频率和瞬时扑动速度,随时能调整两侧翅膀的升力,使得扑翼鸟具备在复杂气流中飞行的能力。加入翅膀位置传感器,通过反馈控制两侧翅膀还能固定在机身某一位置,实现扑翼鸟在复杂气流环境下的滑翔飞行。
新型扑翼驱动机构在机身内设有弹性器件,弹性器件具有缓冲和储存能量的作用,当转变扑翼运动方向时将储存的能量释放出来,辅助驱动电机推动扑翼向相反方向运动。新型扑翼驱动机构的这种设计减小了扑翼在转变运动方向时的能量损失。
新型扑翼驱动机构采用弧形齿条,电机驱动力的力臂始终等于转轴到弧形齿条的距离,驱动力矩始终处于最优值,避免了因力臂变化造成的能量损失。
新型仿鸟扑翼驱动机构的内翼和外翼通过弹性器件连接,在扑翼扑动的过程中可以模仿真实鸟类的翅膀折叠动作以提高扑翼平均升力。
虽然新型仿鸟扑翼驱动机构跟传统的单自由度和双自由度仿鸟扑翼机构相比有以上几个优点,但是距离真实鸟类的飞行能力还有非常巨大的差距,其不足之处和可继续研究的内容总结如下:
真实鸟类拥有很多强有力的肌肉,身体的自由度更多,能非常灵活的控制自己的身体,可以适应非常复杂的气流。要用电机、齿轮和连杆等机械器件来实现真实鸟类的如此多的自由度目前是不可想象的,也许需要人工肌肉等技术成熟以后才能实现。
目前的扑翼鸟包括smartbird在内都仅仅只是模拟了真实鸟类水平前飞时的飞行动作,起飞需要人工抛出,降落需要人工接住,翅膀也无法像真实鸟类那样收起来。
本文仅定性分析了这种新型的仿鸟扑翼机构,下一步需要制作出样机,在低速风洞中做各种实验测试,并尝试实际飞行。需要建立扑翼机构甚至整个扑翼鸟的数学模型,并定量分析弹性材料的尺寸、弹性系数与翅膀尺寸、质量、扑动频率等之间的关系。
还可以绘制扑翼鸟的三维图形,采用空气动力学仿真软件做模拟仿真测试。
在各种复杂气流环境下,如何控制两侧翅膀的扑动速度、频率或位置,配合尾翼的控制,以实现扑翼鸟的安全飞行也值得进一步深入研究。
[1] 陈亮,管贻生,张宪民.仿鸟扑翼机器人气动力建模与分析[J].华南理工大学学报(自然科学版),2011,39(6):53- 70.
[2] 常兴华,马戎,张来平,等.S1223翼型俯仰-沉浮运动的非定常气动特性分析[J].空气动力学学报,2017,35(1): 62-70.
[3] 李卫.仿生微型扑翼飞行器的结构设计与研制[D].南昌:南昌航空大学,2016:22-24.
[4] 何广平,马楠.仿蝙蝠折叠扑翼机构设计与分析[J].北方工业大学学报,2014,26(3):35-41.
[5] 严忠,王坤.基于四杆机构对仿生蜻蜓扑翼飞行器的设计优化与仿真[J].科技资讯,2012,10(27):59-63.
[6] 阮龙欢,侯宇,李诗雷,等.两自由度仿生扑翼飞行机器人设计与运动分析[J].机械设计与制造,2017,55(6): 241-244.
[7] 苗沐霖.扑翼飞行原理探索[J].科教导刊(电子版),2016, 8(31):183-184.
[8] 张西金,方宗德,张明伟,等.电磁振动式微扑翼机构设计和动力学研究[J].机器人,2007,29(6):575-580.
[9] 周凯.微扑翼飞行器动力学仿真及驱动机构优化设计[D].西安:西北工业大学,2007:1-5.
[10] 周凯,方宗德,曹雪梅,等.单曲柄双摇杆扑翼驱动机构的优化设计[J].航空动力学报, 2008,23(1):184-188.
[11] 蒲志,芦利斌,金国栋.SolidWorks在扑翼微型飞行器设计制造中的应用[J].现代计算机(专业版),2012, 39(28):64-72.
[12] 何亚男.微型多扑翼飞行器的流体分析与样机研制[D].哈尔滨:哈尔滨工业大学,2012:17-20.
[13] 董二宝,许旻,李永新,等.单曲柄双摇杆机构同步性能优化[J].机械工程学报,2010,46(7):22-26.
[14] 淘宝网.橡皮筋动力扑翼鸟[EB/OL]. https://item. taobao.com/item.htm?spm=a230r.1.14.185.7b3b59576q4ZvN&id=536218189448&ns=1&abbucket=14#detail,2019-04-15/2019-05-01.
[15] 邓如应,艾志伟,武永超,等.仿鸟扑翼飞行机器人执行机构优化设计的研究[J].机械设计与制造,2015, 53(10):157-160.
[16] 淘宝网.遥控玩具扑翼鸟及其翅膀驱动机构[EB/ OL].https://item.taobao.com/item.htm?id=537848110836&ali_refid=a3_430582_1006:1105680418:N:%E9%81%A5%E6%8E%A7%E9%B8%9F:30f368ebf5410a35707e965c8038df11&ali_trackid=1_30f368ebf5410a35707e965c8038df11&spm=a230r.1.14.1#detail,2019-04-15/2019-05-15.
[17] 梁俊杰,黄文恺,伍冯洁,等.基于ProE的空间四连杆仿鸟扑翼机构的受力分析方法[J].东莞理工学院学报, 2016,23(3):100-114.
[18] 淘宝网.空间四杆扑翼机构[EB/OL].https://item.Tao bao.com/item.htm?spm=a1z0d.6639537.1997196601.650.61bf7484r4R6S7&id=531377262323,2019-04-15/2019-05-11.
[19] Festo企业.SmartBird文档[EB/OL].https://www. festo. com/group/zh/cms/10238.htm,2019-04-15/2019-05-21.
[20] 自制私人飞机交流平台-飞天盟.机械扑翼鸟Smart Bird[EB/OL].http://www.feitianmeng.com/thread-109-1-1.html,2019-04-15/2019-06-01.
[21] 曾锐,昂海松.仿鸟复合振动的扑翼气动分析[J].南京航空航天大学学报,2003,48(1):6-12.
[22] 张西金,方宗德,张国胜,等.仿鸟扑翼试验平台控制器快速原型设计[J].计算机工程与应用,2007,44(22): 93-95.
A New Kind of Imitation Bird Flapping Wing Mechanism
WANG Hong-chao, DU Xiao-lei
(Department of Mechanical Engineering, Xiamen Ocean Vocational College, Xiamen 361000, China)
Based on the analysis of the advantages and disadvantages of the current common bird flapping wing mechanism; a new type of bird flapping wing mechanism is designed according to the common flight characteristics of most birds in nature. The flapping wings on both sides of the new bird flapping wing mechanism can be fluttered at different speeds and frequencies; and different lift forces are generated on the flapping wings on both sides; so that the flapping wing robot can fly in a complex airflow environment such as a gust. Through the feedback control; the flapping wings on both sides can be fixed in their respective positions to realize the gliding flight of the flapping bird in a complex airflow environment. The inner and outer wings are connected by elastic means; which can simulate the flapping action of the real bird’s wings during the flutter flapping process to increase the average lift of the flapping wing.
flapping bird; flapping wing mechanism; flying robot; micro air vehicle
TP242.3
A
1009-9115(2019)06-0062-06
10.3969/j.issn.1009-9115.2019.06.016
2019-07-18
2019-09-18
王红超(1981-),男,河南虞城人,硕士,副教授,研究方向为机器人技术应用。
(责任编辑、校对:田敬军)
猜你喜欢
学与玩(2022年9期)2022-10-31
南方农机(2021年3期)2021-02-07
装备制造技术(2020年1期)2020-12-25
湖北农机化(2020年17期)2020-11-02
空间科学学报(2020年4期)2020-04-22
文苑(2020年12期)2020-04-13
小太阳画报(2019年1期)2019-06-11
数码世界(2017年12期)2017-12-28
北京航空航天大学学报(2016年3期)2016-02-27
少年科学(2014年7期)2014-08-18