
基于多旋翼无人机航测的工程结构三维建模质量影响因素研究
2020-01-18 11:27彭仪普程阳韩征王萍淋吴朝晖
铁道科学与工程学报 2019年12期
彭仪普,程阳,韩征,王萍淋,吴朝晖
(1.中南大学 土木工程学院,湖南 长沙410075;2.湖南省第二测绘院,湖南 长沙410000)
随着飞控技术的发展,多旋翼无人机为环境险峻、检查质量要求高的工程结构或高速铁路路基的健康评估创造了新的研究方向,相对于地平面,无人机为各种设备提供了一个空间位置平台,其可根据载荷能力搭载不同的工作设备进行相应的作业。无人机三维建模研究延伸于倾斜摄影航测,突破了正射影像的局限性,研究认为正射影像的产品质量主要取决于相机的分辨率、飞行高度、地面控制点(GCP)和天气情况(特别是风)的准确性[1]。而固定翼与多旋翼无人机的不同机型飞行的固有特性也对正射影像有影响[2],发展到三维建模阶段,影像匹配已有SIFT 匹配及运动恢复结构算法等理论基础[3],以理想环境下的室内倾斜摄影模拟系统为基础的试验平台,表明三维建模是可行的[4]。在使用无人机进行实体结构三维建模的过程中,影像数据的采集质量是影响最终模型成果质量的关键因素[5-6],但现阶段前期数据获取的影响因素如航高、重合度、光照条件等可能会对模型的质量有影响,但关联性和敏感性尚不明确,基于上述问题,本文设计试验探究其相关关系。
1 方法及原理
倾斜摄影三维建模技术是传统的航空摄影和近景测量的结合和发展,数据获取时从目标区域的俯视角度及多个斜视角度分别采集影像以期尽可能完整的取得目标的纹理属性[7],弥补了正射影像只能从垂直角度拍摄的局限性,无人机上的定位系统可实时将相片获取的POS 数据写入到文件中,作为影像处理的初始外方位元素。执行任务前需对使用的相机进行检校,得到相片的内方位元素和相机镜头畸变参数,镜头的畸变也会使获得的影像产生误差,此误差属于系统误差,可通过一定的计算方法予以纠正[6]。后期通过获取的图像数据进行影像连接点自动匹配,匹配粗差检测,构建自由网,对连接点进行加密,不规则三角网(TIN)生成初步参考模型,而后进行纹理映射等步骤生成完整模型[8],此过程可建立起将二维空间点(u,v)转化到三维实体空间点(x,y,z)的对应关系。
使用搭载配备三轴增稳云台相机的多旋翼无人机进行数据采集时,根据飞行器性能及状态,考虑飞行环境复杂性调整航向重叠率、旁向重叠率、飞行速度、飞行高度、飞行区域、镜头倾斜角度等参数进行航线规划[9],通过地面站链传至天空端。1组完整的数据包含1 组正射影像和4 组不同角度的倾斜影像,最终使用Context Capture 三维建模软件进行内业处理,处理算法主要基于SFM 算法,利用尺度不变的特征变换(SIFT)提取特征,从一系列重叠的照片中生产出实景三维模型。
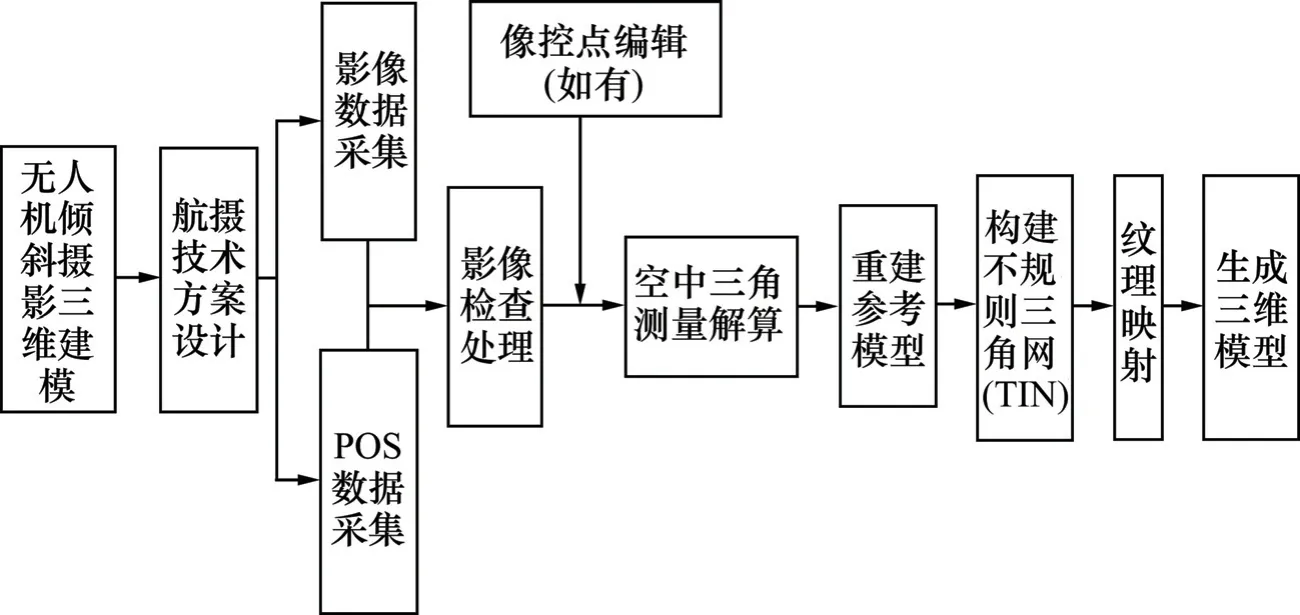
图1 三维建模数据处理方法Fig.1 3D modeling data processing method
影像数据获取是航摄三维建模最基础的一步,也是至关重要的一步,直接影响三维建模的成功与否,影像分辨率和图像质量对空三解算和纹理匹配优化起到关键作用。采样时需保持地面采样距离(GSD)在合理范围内且保证影像之间有足够的重合度。对于一定的地面采样距离(GSD),无人机航拍的飞行高度取决于焦距FL、传感器宽度SW和每张照片宽度PN的像素数[2],有下式:

式中:FH为飞行高度,m;GSD 为地面采样距离,m;FL为焦距,mm;PN为每幅图像宽度的像素数;SW为传感器宽度,mm。
与传统相机不同,执行航拍任务时数码相机应采用自动曝光模式,对焦无限远。光线条件将影响数码相机的自动曝光时的快门速度、光圈、EV 值、ISO 感光度等参数,进而影响数据质量。
通常认为在航测三维实景建模过程中,飞行高度越低、重合度越大、光照条件越强,像素数目越多,生产出的三维模型质量将越高[10-11]。但这也同时带来了任务时间长、环境变量复杂、数据海量、甚至溢出处理能力等问题,因此,本文对飞行高度、航线重合度、光照条件等建模质量的可能影响因素进行试验探究讨论。
2 试验
试验设备以大疆Phantom 4 Pro 多旋翼无人机为平台,搭载单镜头三轴增稳云台,镜头FC6310参数:像素2 000 万,FOV 84°焦距8.8 mm/24 mm(35 mm 格式等效),快门速度机械8-1/2 000 s,电子8-1/8 000 s,分辨率:5 472×3 648,f/2.8~f/11 带自动对焦(对焦距离1 m-无穷远),配备GPS 定位系统及指南针、IMU、气压计等保持运行姿态稳定有效的硬件设备,与地面站链接,实时交换数据。
试验场地为一处典型重力式支护挡墙边坡,挡墙边坡高差最大处约7 m,最小处约2 m,结构整体长度约120 m,边坡挡墙上部区域略有坡度,下部区域地形平坦。
2.1 飞行高度及重合度
规划航线为S 型,采样方式为一次目标区域正射影像及4 次交叉垂直方向的倾斜影像组成一组完整数据,后4 组影像的相机倾斜角度为45°,航线1,2 和3 已在图中标注,航线4 和5 与航线2 和3 对称布置,分别选取相对工程区域地面高度30,50和70 m 的空域平面为作业面进行数据获取工作,每个高度平面进行航向及旁向重合度均为60%以及80%的2 次独立航拍,设计试验参数如表1。
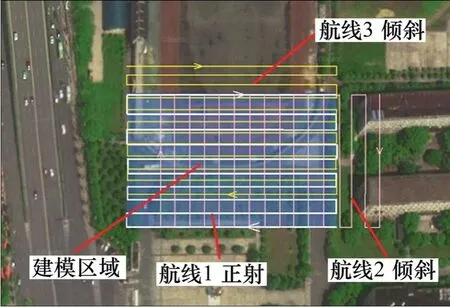
图2 重力式挡土墙边坡三维建模目标区域Fig.2 Three-dimensional modeling target area of gravity retaining wall slope

表1 试验参数设计Table 1 Design of test parameters
控制其他影响因素条件相同且在合理范围:采集作业时的光照条件(光照度50 000 lux 左右),试验用无人机具有一定的抗风能力,风速在3 级以下可有效防止航线偏移造成区域黑洞,任务执行过程无人工干预。
2.2 光照度
在以往高空航测中,以太阳高度角来确定拍摄的时间,保证充足的光照度,避免过大的阴影。此次超低空区域建模试验中直接以光照度数值为指标,测试不同光照度对实体建模质量的影响。光照度使用照度计计量,照度计型号AS803,量程1-200 000 lux。以光照度工况7 1 000 lux、工况8 5 000 lux、工况9 10 000 lux、工况3 50 000 lux、工况10 100 000 lux 为变量,控制航高为50 m,航向及旁向重合度均80%,风速、采样方式、相机倾斜角度等同2.1 中试验条件,任务执行过程无人工干预。
3 成果与分析评价
将获取的影像数据导入Context Capture 软件,初步检查影像质量,为衡量以上因素对建模质量的影响,空三解算模式为仅使用影像pos 数据定位,免像控点。计算生成连接点,作为三维实体重建的基础[12]。连接点质量越高,加密后生成三维模型质量则越高,通过评估空三解算后相片位置的调整幅度,连接点的位置及分辨率可分析输入数据的质量[13-14]。之后重定位三维建模区域,可进行实景重建作业[15]。
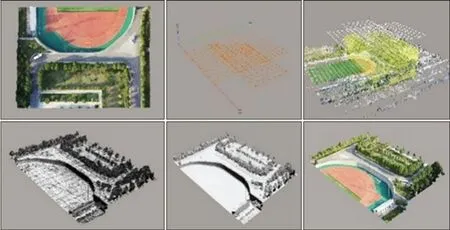
图3 实景三维模型建模过程Fig.3 Reality 3D model modeling process
试验共成功建立模型7 组,工况7、工况8、工况10 模型建立失败或局部缺失。分析评价时主要以每种工况解算出的相片位置不确定度、连接点位置不确定度、连接点分辨率以及三维模型结构尺寸与边坡挡墙结构特征值的差异为主要衡量指标。以本次试验质量最高的工况1 模型计算结果与质量最低的工况6 模型计算结果为例。
3.1 相片位置不确定度
相片位置为进行空三解算完成,调整后的所有相片的镜头成像位置,不确定度表示由于测量误差的存在,对被测量值的不能肯定的程度,是测量结果质量的指标,不确定度越小,所得结果与被测量的真值愈接近,质量越高,其中不确定的方向和大小。表示为3D 椭球投影在3 个平面视图上的椭圆。椭圆面积越小,不确定度越小,质量越高。图4为两工况下分别计算出的照片位置(黑点)的俯视图(XY平面)、侧视图(ZY平面)和前视图(XZ平面)。蓝色椭圆区域表示相片位置不确定度。工况1 相对于工况6 相片位置不确定度椭圆面积较小,均匀且规则,定位位置误差X,Y和Z各方向均值工况6 均大于工况1 2 倍以上。
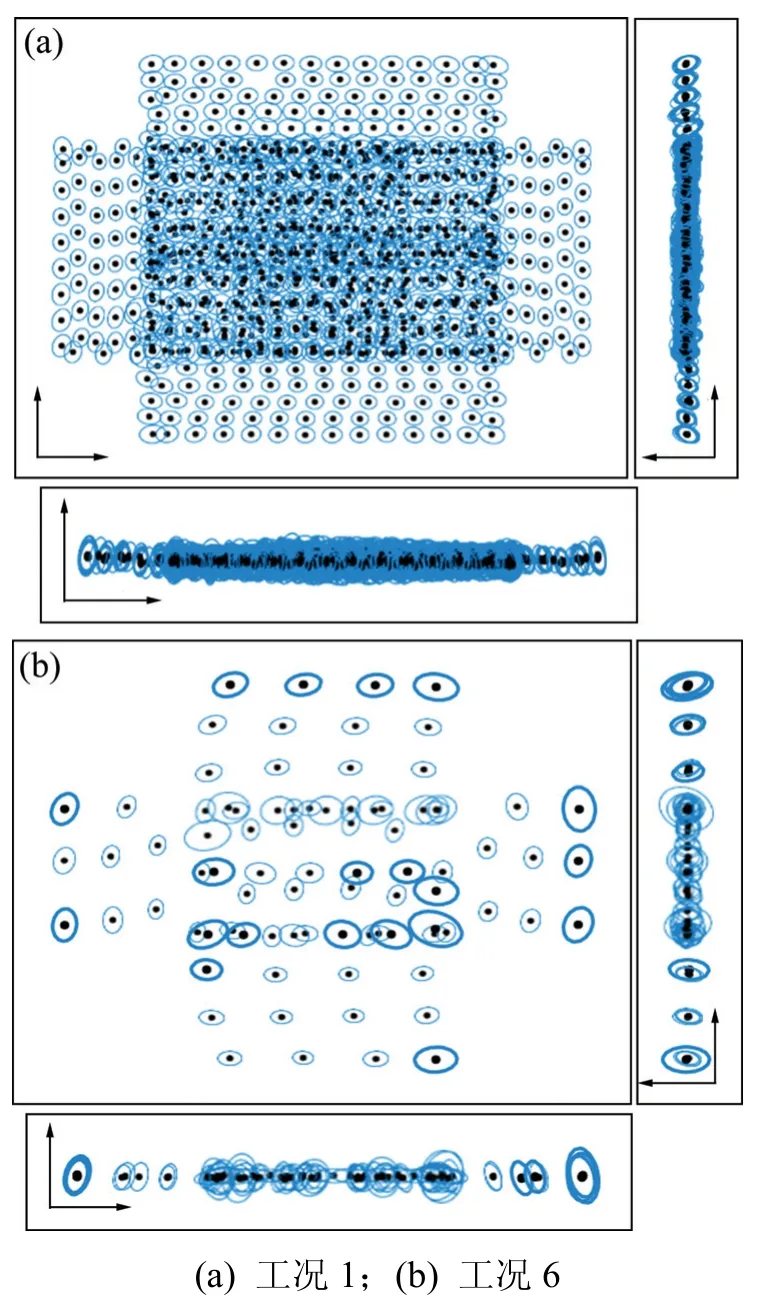
图4 照片位置不确定度对比Fig.4 Comparison of photo location uncertainty
工况1 与工况6 的相片定位位置误差如表2和表3所示。

表2 工况2 相片定位位置误差Table 2 Working condition I photo positioning position error
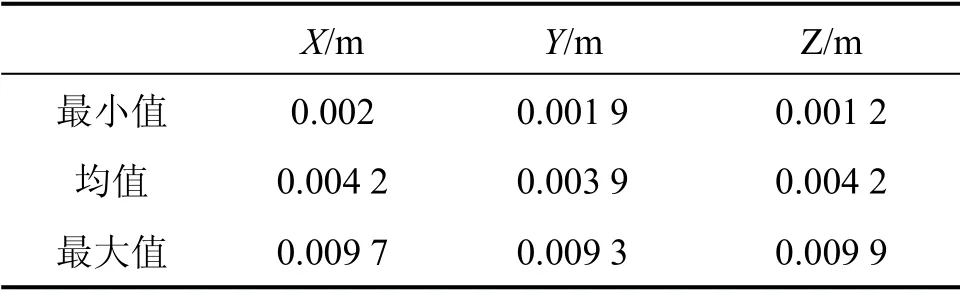
表3 工况6 相片定位位置误差Table 3 Working conditions Ⅵphoto positioning position error
3.2 连接点位置不确定度
空三解算出的连接点单点位置不确定度大小用不同的颜色表示,色带代表的数值在每幅图下给出,以米为单位,数值越大,精度越低。解算结果如图5所示,顶视图(XY平面)、侧视图(ZY平面)和前视图(XZ平面)显示所有的连接点分布位置,工况1 最小不确定度为0.001 9 m,最大不确定度为0.904 94 m,中值不确定度等于0.035 27 m;工况6最小不确定度为0.006 1 m,最大不确定度为1.462 8 m,中值不确定度等于0.056 7 m。统计表明建模区域工况1 的连接点位置不确定度远小于工况6,且连接点的密集度更高。
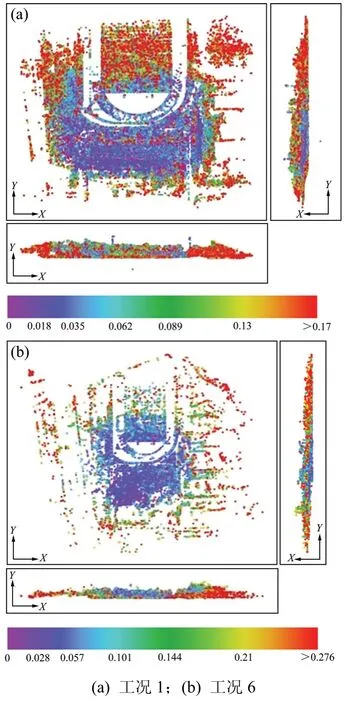
图5 连接点位置不确定度对比Fig.5 Comparison of location uncertainty of connection points
3.3 连接点分辨率
空三解算出的连接点由于镜头的视角不同而带来的影像分辨率不一致的情况,像点观测的精度实际是有差异的。图6所示云图中俯视图(XY平面)、侧视图(ZY平面)和前视图(XZ平面)可显示所有连接点,不同颜色表示每点的分辨率。以m/像素为单位。工况1 最高分辨率为0.006 04 m/像素,最低分辨率为0.037 76 m/像素,中值分辨率等于0.012 42 m/像素;工况6 最高分辨率为0.017 1 m/像素,最低分辨率为0.076 3 m/像素,中值分辨率等于0.027 7 m/像素。工况1 的分辨率清晰度约为工况6 的2 倍。
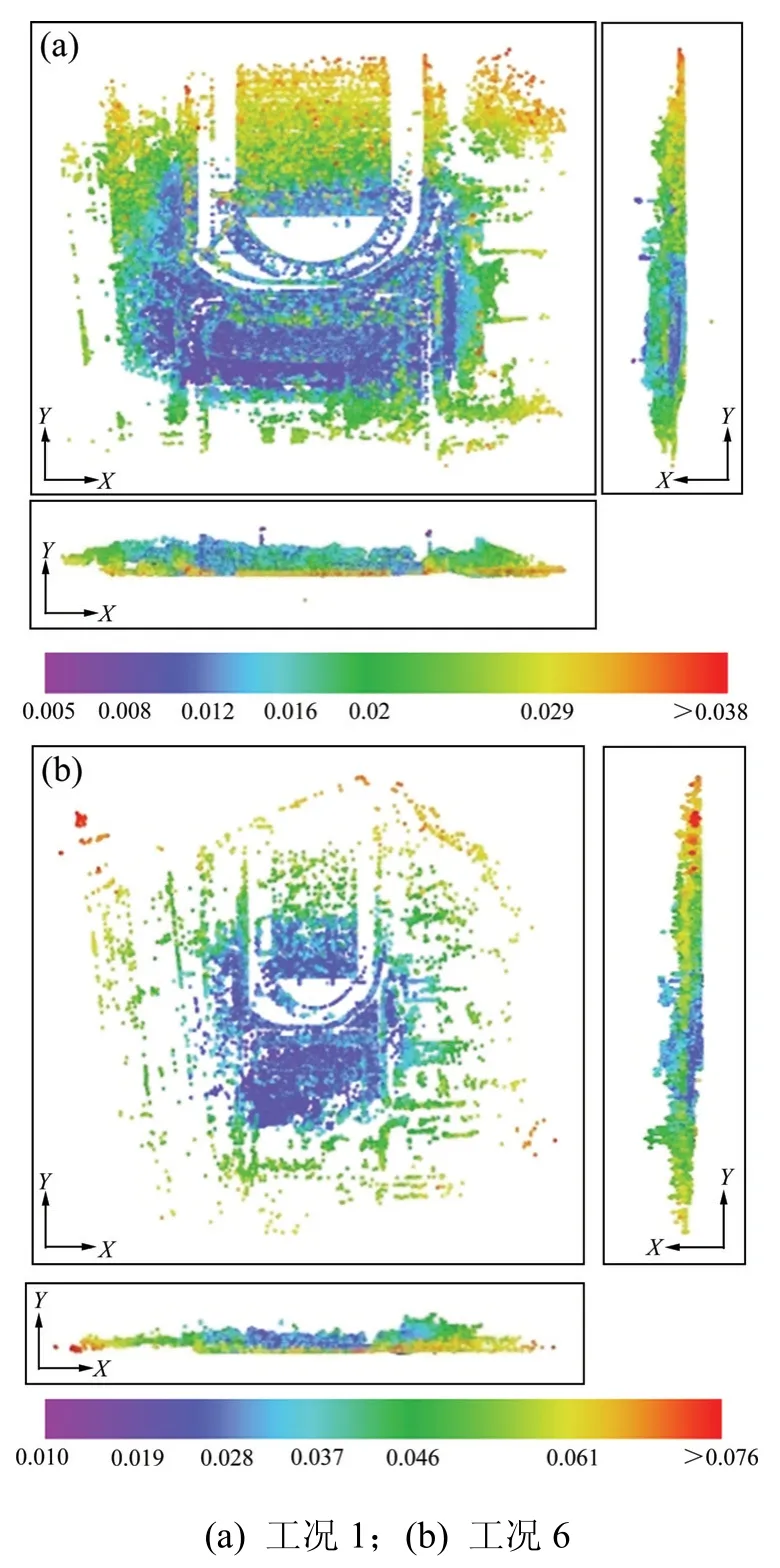
图6 连接点分辨率对比Fig.6 Comparison of connection point resolution
三维模型的复原以空三解算出的连接点为参考,连接点综合质量情况如表4所示。
线距离的均方根为线距离平方的平均值的平方根。线是从照片位置开始并穿过该照片中观察到的控制点位置的3D 线,从真实点3D 位置到该线的正交距离是线距离。

表4 空三解算模型连接点的质量情况Table 4 Quality of the connection points of the empty three-solution mode
由表中数据分析可得重合度相同条件下航高越高,空三解算模型连接点数量越少,呈负相关关系;每点所在相片数目中值基本相同,不同航高下的重投影误差特征值也基本一致,线距离均方根与航高呈现出正相关关系,航高越高,距离越大。
航高相同时,与高重合度相比,低重合度条件下的空三解算模型点数量有较大降幅,每点所在相片数目中值降低,每照片的连接点数目中值减少,而重投影误差特征值相类似;低重合度模型的连接点线距离均方根整体高于高重合度。
工况3 与工况9 光照条件不同,但连接点数据特征值高度类似。
3.4 三维模型精度分析
在Acute3D Viewer 中对选取的实体结构中的7组特征边(如图7所示)对应的模型尺寸进行标注量测,每组数据量测5 次,取平均值作为模型结构长度,与实体结构的尺寸进行比对,并计算每种工况下的数据中误差,结果如表5所示。

图7 边坡挡墙结构尺寸Fig.7 Engineering structure dimensions
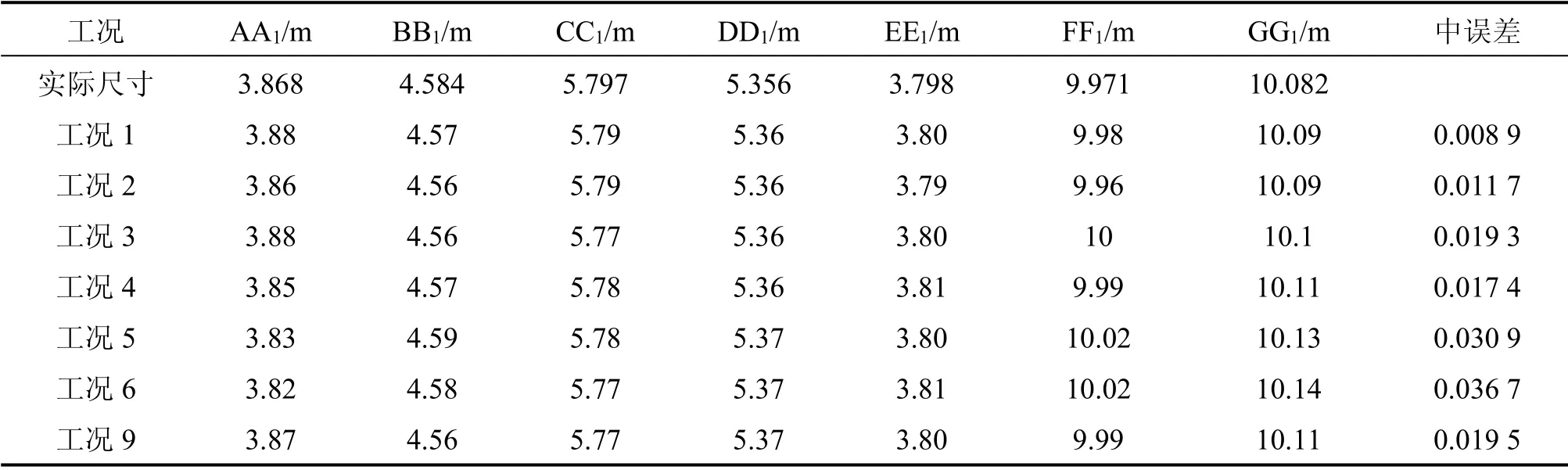
表5 工程结构实测及三维模型尺寸Table 5 Measurement of engineering structure and dimensions of three-dimensional model
由表中数据统计可得,工况1 到工况6 三维模型的建立质量都较高,达到厘米级,满足地形测绘中的1:500 地形图测绘的质量要求,也可满足一般工程结构的建模需求。对比各模型中误差表明超低空航测三维建模航线重合度相同时,中误差随高度的增高而增大;航线高度相同时,重合度降低20%对模型尺寸中误差影响有限,但升至70 m 航高后,中误差出现逐渐增大趋势,与空3 解算连接点的质量评价相互印证,如图8所示。
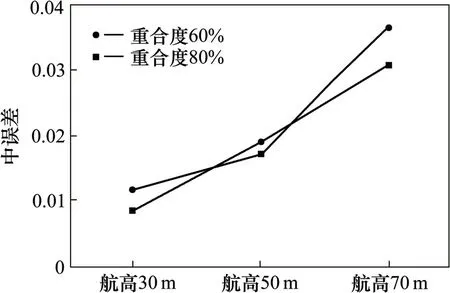
图8 实体结构与三维模型尺寸中误差对比Fig.8 Comparison of error between solid structure and three-dimensional model size
工况7 及工况8 采集的数据由于光线过暗导致建模失败,工况10 由于光线过强,在颜色单一、纹理重复的区域也发生局部空缺、建模失败的情况,工况3 及工况9 建模成功,中误差差别也非常小,仅在纹理映射方面,光照度更大的工况3 在实景三维模型上的观察效果更加清晰明朗。结果说明光照度对三维模型的复建影响是基础性的,但成功建立后,对模型质量影响较小。
在既定的试验计划外,进行的相关试验表明:对小区域进行三维建模时,若区域过小,例如小于1 000 m2,应采用低航高、高重合度飞行参数执行任务,避免相片数目不足,数据获取不完整;一组完整数据的第2 至5 条航线的镜头倾斜角度对建模质量也有影响,镜头倾斜角度增大,则第2 至5 条航线的飞行区域将与拍摄目标区域重叠度增大,相片成像位置与拍摄目标之间的距离缩短,质量提高,但具有T 字型结构的拍摄目标下方的盲区将增大,且若镜头倾斜角度过大,与第1 条航线的正射影像高度相似,将缺少足够的拍摄目标侧方位信息;镜头的像素对建模质量也有较大的影响,采用大疆经纬M600 pro 搭载RTK 定位系统及ZenmuseX5 摄像头(4/3″,1 600 万像素)进行相片获取试验,与Phantom 4 pro 相比前者除镜头像素低于后者外,其他各方面性能均优于后者,但在工况3下后者建模质量较高的情况下,前者多有失败,生成的部分模型纹理粗糙,质量较差。上述问题将在未来的工作中继续探究完善。
4 结论
1)在进行无人机实体结构三维建模时,规划航高越低,航线重合度越高,相片质量越佳,空三解算后的相片位置和连接点位置越精确,连接点的质量越好,模型质量越高。相对于重合度,三维模型质量更敏感于航高因素的影响,
2)航拍三维建模对光照条件的影响敏感,光照度过低或过高都将使三维模型建模直接失败或部分失败,而在合理的光照度范围内获取数据模型建立完成后,模型质量差异较小。
3)建议在其他因素相对稳定情况下,考虑作业时间、作业面积及后期处理的可行性时等可采用低航高低重合度,高航高高重合度的任务规划思想,相片数据获取应在光照度10 000 lux 到100 000 lux之间,最优50 000 lux 左右时的环境中进行。
猜你喜欢
传感器世界(2022年7期)2022-10-12
湖北农业科学(2022年12期)2022-07-21
河南城建学院学报(2020年3期)2020-08-14
作品(2020年4期)2020-05-11
数码世界(2018年5期)2018-12-21
新课程·小学(2017年8期)2017-09-20
课堂内外·创新作文小学版(2017年1期)2017-06-01
农业工程技术·温室园艺(2016年9期)2017-04-23
IT经理世界(2017年4期)2017-03-25
汽车文摘(2016年6期)2016-12-07
