基于R-FCN框架的多候选关联在线多目标跟踪
2020-01-17 01:57王永雄
光电工程 2020年1期
鄂 贵,王永雄
基于R-FCN框架的多候选关联在线多目标跟踪
鄂 贵,王永雄*
上海理工大学光电信息与计算机工程学院,上海 200093
在线多目标跟踪是实时视频序列分析的重要前提。针对在线多目标跟踪中目标检测可靠性低、跟踪丢失较多、轨迹不平滑等问题,提出了基于R-FCN网络框架的多候选关联的在线多目标跟踪模型。首先,通过基于R-FCN网络从KF预测结果和检测结果中获取更可靠的候选框,然后利用Siamese网络进行基于外观特征的相似性度量,实现候选与轨迹之间的数据关联,最后通过RANSAC算法优化跟踪轨迹。在人流密集和目标被部分遮挡的复杂场景中,提出的算法具有较高的目标识别和跟踪能力,大幅减少漏检和误检现象,跟踪轨迹更加连续平滑。实验结果表明,在同等条件下,与当前已有的方法对比,本文提出在目标跟踪准确度(MOTA)、丢失轨迹数(ML)和误报次数(FN)等多个性能指标均有较大提升。
多目标跟踪;候选模型;孪生网络;轨迹估计

1 引 言
多目标跟踪是计算机视觉领域研究的热点之一,在视频分析、人机交互、自动驾驶和交通管制等众多领域有着十分广泛的应用。近年来,随着目标检测算法的快速发展和目标检测精度不断改善[1-2],基于检测的多目标跟踪框架[3-9]得到了广泛关注和研究。基于检测的多目标跟踪框架流程是:首先使用离线训练好的目标检测器逐帧检测目标,利用相似性匹配方法对检测目标进行关联,然后不断地利用生成的轨迹与检测结果进行匹配,生成更加可靠的轨迹。
由于目标的多样化、运动方式的不确定性以及遮挡等原因,多个目标的运动轨迹关联比较复杂,因此,多目标检测与运动轨迹之间的关联方式是多目标跟踪的研究重点之一。为了处理多目标之间数据关联的难题,目前提出了多种应对措施,主要分为相邻的数据关联方法和多帧的数据关联方法两大类。由于相邻帧的数据关联方法采用在线学习的方式,在实际应用中更具有价值,因此被大量研究。Bewley[4]提出利用Kalman滤波器构建关于目标运动的线性预测模型,预测目标在下一帧的运动信息,然后通过匈牙利算法实现多目标在相邻帧之间的关联,此方法在一定程度上提高了目标与轨迹关联的成功率,但在比较复杂的场景中仅考虑了目标运动信息,算法的跟踪性能较差。考虑目标频繁被遮挡和外观相似等因素,Wojke[5]在Bewley的基础上做了改进,使用卷积神经网络的方法提取目标的高度抽象特征作为其外观信息,同时在数据关联中加入级联匹配策略,对目标的跟踪表现得到较好的提升,但对目标的漏检和误检未做分析。文献[6]在检测框架中建立关于判别目标漏检的模型,使漏检目标有机会重新被检测,有效地改善了目标漏检问题,但算法的计算复杂度明显增加。在线学习的方法采用不同方式处理了相邻帧之间的目标数据关联问题,只利用了单帧中的目标数据实现与运动轨迹之间的数据关联。但是,当目标检测结果不可靠时,若只考虑检测结果作为目标的候选,直接把下一帧的检测结果作为轨迹关联的对象,往往很难得到满意的跟踪结果。
为了解决检测的不可靠性问题,许多文献提出了多帧的数据关联方法[10-13],此类方法是利用多帧检测的响应数据建立模型,可有效地抑制轨迹漂移和错误匹配等问题,主要有网络流模型、条件随机场模型、广义关联图模型等。Milan等[10]提出一种离散-连续能量最小化的方法,将离散数据关联问题与轨迹估计的连续问题整合到一个能量函数中,用能量最小化算法求得最优解得到目标轨迹,但对运动相似且距离相近的目标区分度不好。文献[12]在Dehghan等[11]的基础上将关联问题转化为广义最大团问题,通过不断迭代寻找能量最小的子图解决关联问题,并考虑了轨迹片段长度的自适应,取得了较好的跟踪结果。虽然多帧数据关联方法能够获得不错的跟踪效果,但它属于离线的跟踪方法,且计算量偏大,不适合实时性要求高的目标跟踪应用。因此,为了获得跟踪的可靠性和实时性,不仅要求目标检测方法可靠,目标之间数据关联准确,而且要求部分目标遮挡时运动估计准确。
综上,本文提出了一种基于R-FCN框架的多候选关联的在线多目标跟踪方法。其创新之处在于,首先,提出了融合卡尔曼滤波器的预测框和检测器的检测框的候选选择模型,不再仅依靠检测结果作为候选框,提高了算法的鲁棒性。然后,利用Siamese网络框架[14]实现基于目标外观相似性度量,并融合了目标多种特征信息完成多目标之间数据关联,提高了对复杂跟踪场景中目标的判别能力。最后,针对人流密集以及容易被遮挡的复杂场景中目标可能存在的漏检和误检等问题,提出使用RANSAC算法对跟踪轨迹优化处理,从而得到更加完整准确的轨迹信息。
2 基于R-FCN的多目标跟踪框架
本文构建的基于检测的多目标跟踪框架主要分为候选框的选择、数据关联和轨迹优化等几个步骤,提出的算法流程如图1所示。

图1 本文算法总流程
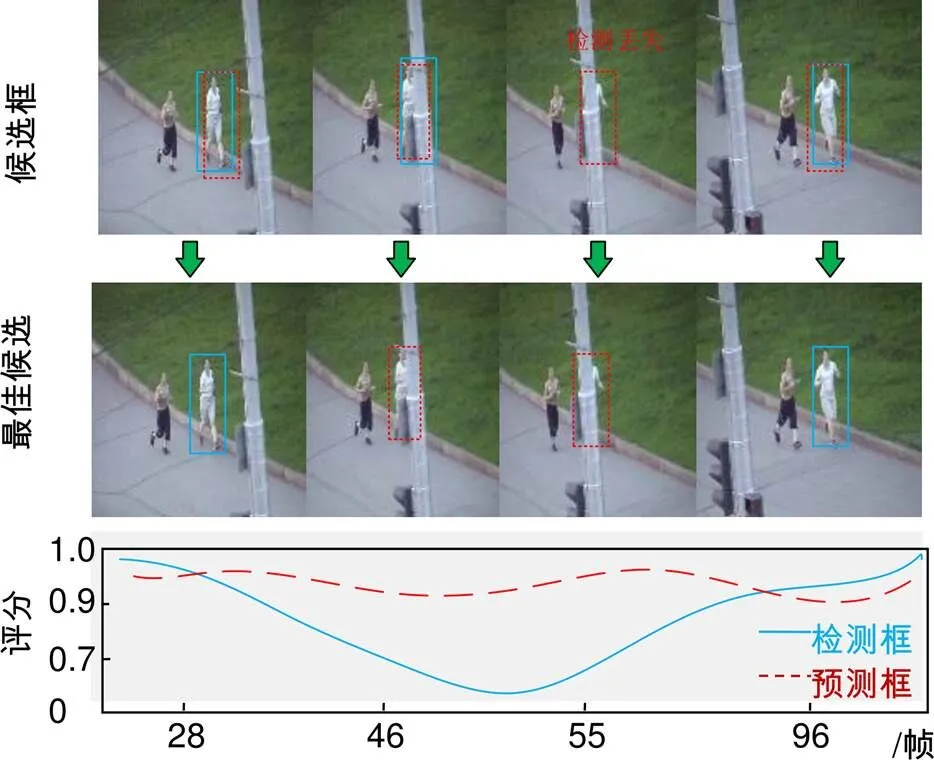
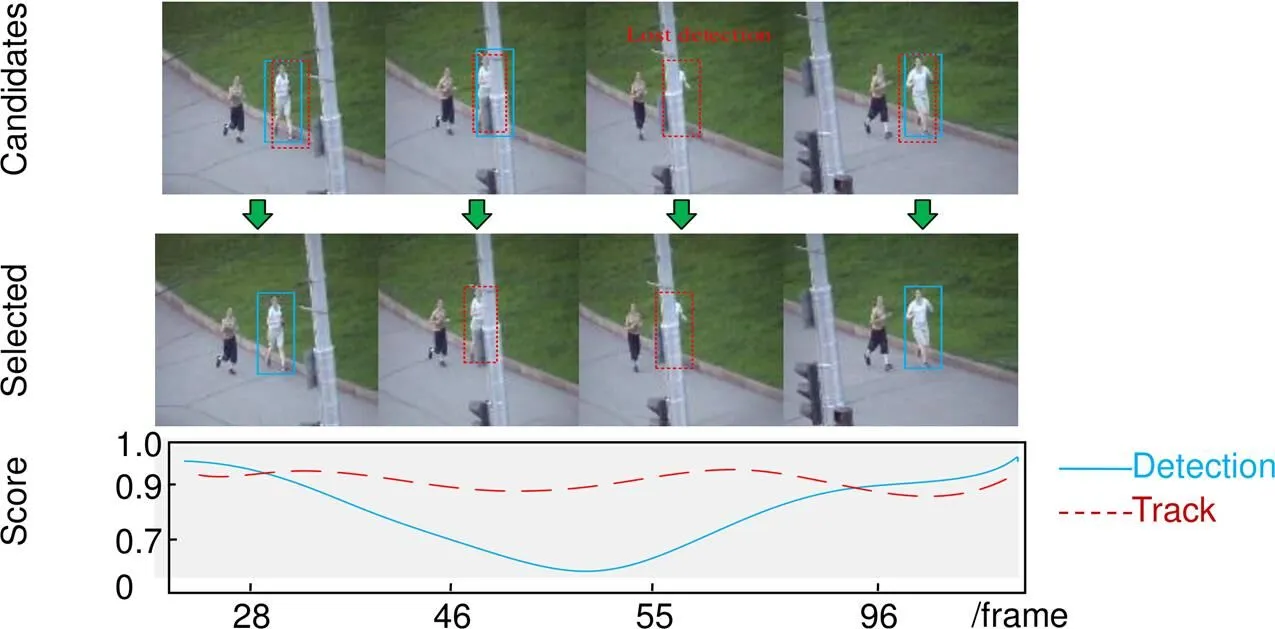
图2 候选框选择流程图
结合图2进一步说明算法流程。首先获取当前帧中的候选框,每个目标的候选框有两种可能的候选位置,分别来自检测器的检测(浅蓝色的实线框)和卡尔曼滤波器的预测(深红色的虚线框)。其次,通过基于R-FCN网络构建的目标评价函数对这些候选框进行评分(浅蓝色曲线和深红色曲线分别对应目标在不同帧中检测框得分和预测框得分),获得判别这两种不同候选框是否足够可靠的依据,然后使用非极大值抑制和最低阈值的方法过滤一些可靠性较低的候选框,得到最终的目标候选框。接着,根据各个目标特征的重要性,把目标的空间位置信息、外观信息和目标尺度等多个特征的融合结果作为轨迹与最佳的候选框之间关联的依据。其中,外观特征通过Siamese网络框架获得。最后,为进一步改善目标漏检和误检问题,使用RANSAC算法对已有的轨迹进行优化。
2.1 建立目标候选选择模型
2.1.1 基于R-FCN的目标识别
R-FCN是在Faster RCNN基础上改进的,在保证检测精度不变的情况下,极大地提高了检测速度,为了解决在检测网络中加入ROI pooling后,所生成的特征映射图对目标位置不再敏感的问题而提出的。R-FCN结构如图3所示,主要由全卷积网络FCN、区域生成网络RPN和ROI子网络三个部分构成。为了保证分类子网络和定位子网络所处理的目标特征映射图对目标位置比较敏感,提出了将目标的各部分位置信息融入ROI pooling的位置敏感的区域池化(position-sensitive ROI pooling)。R-FCN实现目标检测的过程主要分为两步,首先利用去掉全连接层的ResNet-101网络处理待检测图片,生成关于目标位置不敏感的特征映射图,然后在生成的特征映射图上通过RPN获得不同目标在不同尺度下的搜索框,再利用非极大值抑制方法过滤得分较低的搜索框,完成目标的初步定位任务;其次,分别利用目标的分类子网络和定位子网络处理由RPN输出的目标位置信息,从而实现目标的准确分类和精确定位。
为了得到最佳的候选框,本文利用R-FCN[15]网络框架对同一帧中获得的检测框进行重新识别,并通过R-FCN的输出结果构建检测框的目标函数。采用轻量级网络SqueezeNet[16]作为R-FCN提取特征的基本骨架,减少生成目标特征映射图的时间,从而保证算法处理每帧中检测目标的实时性。把每个候选框作为一个感兴趣的区域,采用=(0,0,,)表示感兴趣区域,其中(0,0)表示区域左上角点坐标,、分别表示宽和高。利用一个´的网格将每个感兴趣区域划分为2部分,即2个bin,每个bin对应目标空间位置的一部分。目标感兴趣区域的得分定义如下:
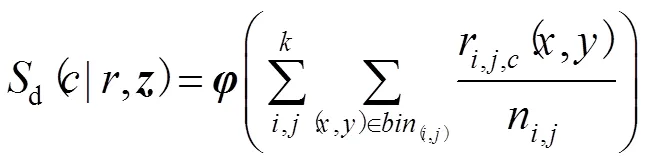
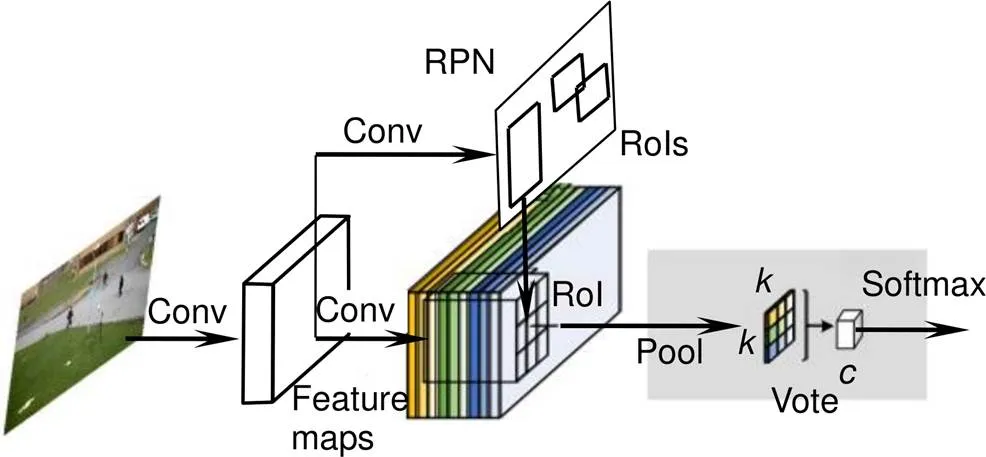
图3 R-FCN网络架构
在训练阶段,训练的正样本从目标周围随机采样得到,相同数量的负样本以同样的方式从背景周围采样得到。通过将目标2个部分的空间位置信息融入目标类别得分中,最终得到健壮的目标类别得分。比如,取3,分别表示目标的上左部分、上中部分、上右部分等9个部分。因此,当目标被部分遮挡时,通过R-FCN仍然能很好地识别目标。
2.1.2 构建候选框的评价函数
在多目标跟踪过程中,若目标发生遮挡,通过检测器难以得到准确的目标。当目标短时间被遮挡时,如图2中序列第55帧中目标被路标遮挡,此时目标检测丢失,但利用KF仍然可以获得不错的目标位置预测结果,可以通过KF的预测来抑制跟踪目标漂移。然而,当目标长时间被遮挡时,滤波器的预测精度会随着遮挡时间的延长而降低,因此,需要对滤波器预测结果进行可靠性评估。使用det表示某条轨迹的连续跟踪的检测数量,trk表示某条轨迹自上次成功匹配后连续丢失的检测数量,一条完整轨迹可以由det和trk共同表示。轨迹评价函数定义如下:

为了对候选框有统一评价标准,提出了一种融合两种评价指标(式(1)和式(2))的评价函数。评价函数定义如下:

其中:表示感兴趣区域,det、trk分别表示同一帧中收集的检测框集合和预测框集合。
2.2 基于Siamese网络提取的外观特征
在数据关联过程中,采用目标的外观特征进行匹配是一种重要的匹配度量方式。外观特征选取的优劣直接影响轨迹与检测框之间的分配结果,因此选取健壮的行人的外观特征尤为重要。为了比较两个目标外观之间的相似性,如图4所示,本文利用Siamese网络框架实现轨迹与候选框之间的外观相似度量。孪生网络框架由两个相同的网络分支和决策网络组成,其中每个网络分支用于获取对应输入的深度信息,而决策网络将两个分支获取的两个目标的深度信息融合得到两个目标外观相似度。
为了得到比较好的判别效果,同时保证跟踪的时效性,预训练模型选用深度残差网络ResNet-50[18],去除ResNet-50的平均池化层和全连接层,通过卷积层提取目标外观特征信息,并将Spp network[17]加到网络的全连接之前适应不同尺寸图像的输入,减少输入图像的信息损失,从而得到更加健壮的特征信息。训练数据采用行人重新识别数据集Market1501[19],该数据集包含在不同视角和不同场景下拍摄的1501个不同的行人目标,总共32000张训练图片。为了保证网络模型更容易收敛,训练输入采用批量的方式进行处理,每次输入一批图片(32张)对网络进行训练。为了更好地区分正负样本,采用对比损失作为Siamese网络在训练过程中的损失函数,每次从一批训练样本中挑选最难训练的一组样本进行训练,使正样本之间的欧氏距离尽量小,负样本之间的欧氏距离尽量大。
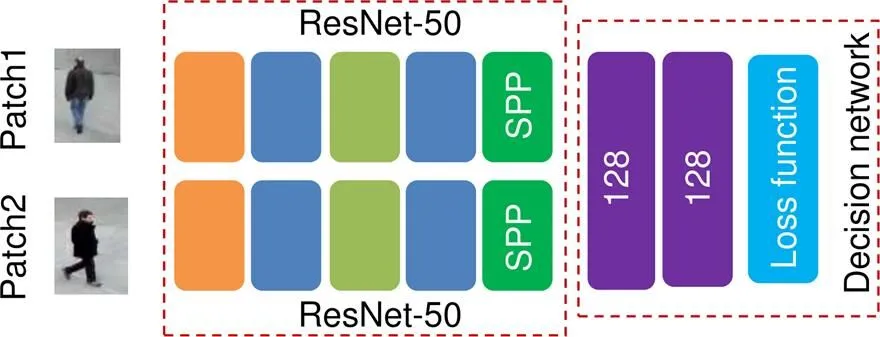
图4 Siamese网络结构
2.3 数据关联
考虑到多目标之间相互遮挡、目标形变以及目标外观存在突变等因素,在计算匹配代价时,我们融合了目标外观信息、目标尺寸信息以及运动信息,因此可以得到更为合理的匹配效果。目标外观特征由2.2节的Siamese网络得到,通过目标在下一帧中的KF预测框与候选框之间的交并比(IOU)计算目标的运动信息,目标尺寸信息由目标框的长和宽确定。
运动信息匹配代价:

外观特征匹配代价:

目标框尺度特征匹配代价:

因此,最终的多特征融合代价为

2.4 基于RANSAC算法的目标漏检处理
在某些帧中,由于目标可能被遮挡或者漏检,利用目标检测器和KF预测器都无法得到合适的候选框,因此通过轨迹与候选框之间的数据关联无法找到对应目标,此时目标的运动轨迹便不再是连续的。为了解决或部分解决上述问题,在目标数据关联之后,每隔帧对由跟踪目标框的质心连接而成的轨迹进行优化。首先,收集每条待优化轨迹上所有点,利用RANSAC方法估计一条最佳轨迹,然后在同一条轨迹的不同位置添加一个虚拟节点,改善跟踪过程中存在的漏检和预测失败问题。当某条轨迹在某个位置匹配不到检测目标时,可以使用虚拟节点来代替丢失的检测目标,如图5所示。
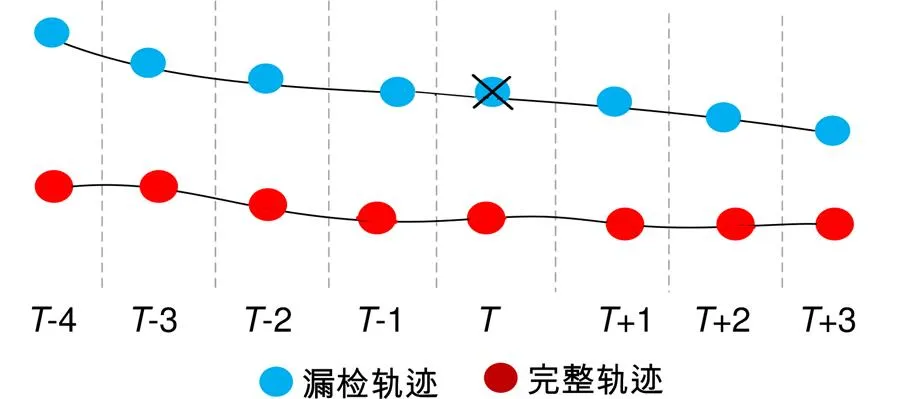
图5 目标轨迹存在漏检

其中表示阈值,取值为5。为了使轨迹上局内点数量最大,通过如下公式优化:

3 实验结果与分析
为了验证算法的有效性,在经典的目标跟踪数据集MOT16上进行实验,因该数据集提供相关视频序列的目标检测结果,在实验中不针对目标进行检测。MOT16数据集囊括了7个训练集视频序列和7个测试集视频序列,这些视频序列包含运动相机、目标频繁遮挡、人流密集、多视角等挑战因素,属于比较复杂的跟踪场景。

3.1 定性分析
首先在MOT16测试集中的7个视频序列上进行实验,选择其中3个序列(MOT16-01、03和06)进行定性分析。这些视频序列是在不同场景不同光照条件下拍摄的,其中有些序列跟踪场景比较复杂,人流密集,相互遮挡严重,要实现目标的稳定准确跟踪难度较大。
MOT16-01序列是在比较暗的场景下拍摄,人流适中,目标间交互过程中存在短时间遮挡,图6(a)显示了106#、264#、349#三帧视觉跟踪效果图,编号为4号、6号的目标从106#运动到349#过程中存在短暂的漏检,但这两个目标仍然能持续准确地被跟踪。
MOT16-03序列共有1500帧,分辨率比较高,帧数较快,是在灯光较亮的场景下拍摄的,跟踪场景比较复杂,人流较为密集,除少数漏检目标跟踪失败外,大部分目标都能被正常跟踪,说明本文算法对复杂环境有较好的鲁棒性,图6(b)包含了319#、424#两帧跟踪结果图,大部分目标(如159号、144号、99号、116号、131号等)从319帧运动到424帧都能被跟踪,而少数目标如86号、114号、142号等因长时间遮挡导致目标一直被漏检,同时其KF预测结果也未能及时更新,从而使得目标跟踪失败。137号目标因被路灯遮挡与旁边外观相似的目标发生IDS转换。
MOT16-06序列共有1194帧,是在人流较为密集的马路边上拍摄的。由于拍摄过程中相机是不断向前运动的,并且路边行人比较多,因此有很多目标频繁进出跟踪场景。图6(c)中包含了其中的473#、531#、1074#三帧跟踪结果图,对比473#和531#两帧图片,容易看到除了336号和294号目标因自身大部分遮挡和外观变化原因跟踪失败外,其他目标基本都能正常跟踪。观察1074#,发现仅283号目标在之前两帧均有出现,并且目标IDS一直未发生变化,目标被持续稳定跟踪。
3.2 定量分析
3.2.1 评估标准
本文使用CLEAR MOT[20]标准对算法定量评估,选取其中5个重要性能指标:多目标跟踪准确度(multiple object tracking accuracy,MOTA,用MOT表示)、目标被误报次数(false positive,FP,用P表示)、目标丢失次数(false negative,FN,用N表示)、真实跟踪轨迹数量(mostly tracked targets,MT,用T表示)和丢失轨迹数量(mostly lost targets,ML,用L表示)。目标被误报次数FP指跟踪错误的目标数量(跟踪位置和真实位置偏移大于阈值的目标数量);目标丢失次数FN指跟踪失败的目标数量(目标真实位置没有与之对应的跟踪位置);真实跟踪轨迹数量MT指跟踪结果占其真实轨迹长度比例大于80%的轨迹数量;丢失轨迹数量ML指跟踪结果占其真实轨迹长度比例小于20%的轨迹数量。
MOTA是一个包含目标被误报次数FP、目标丢失次数FN和身份转换次数IDS()三个部分的评价多目标跟踪准确度的综合性能指标,其计算式:

其中:t表示视频帧索引,FN(t)表示第t帧中跟踪失败的目标数量,FP(t)表示第t帧中跟踪错误的目标数量,WIDS(t)表示第t帧中目标轨迹ID转换的次数,表示第t帧中真实目标的数量。
3.2.2 验证算法
本文算法利用了R-FCN检测网络模块和Siamese相似度量网络模块,其中R-FCN检测网络作为候选模型的重要部分,用于对检测和预测结果进行重新识别分类,Siamese相似度量网络用于提取健壮的目标外观特征完成轨迹与候选之间数据关联。为了证明算法的有效性,我们在MOT16训练集上验证了算法各个模块对多目标跟踪的多个不同的性能指标的影响。基准算法采用卡尔曼滤波器预测目标的新位置,然后通过IOU计算预测位置与检测位置的重叠率实现轨迹与候选之间数据关联。在基准算法基础上,依次增加各个网络模块,用S表示Siamese相似性度量网络模块,R表示R-FCN检测网络模块,实验对比结果见表1。
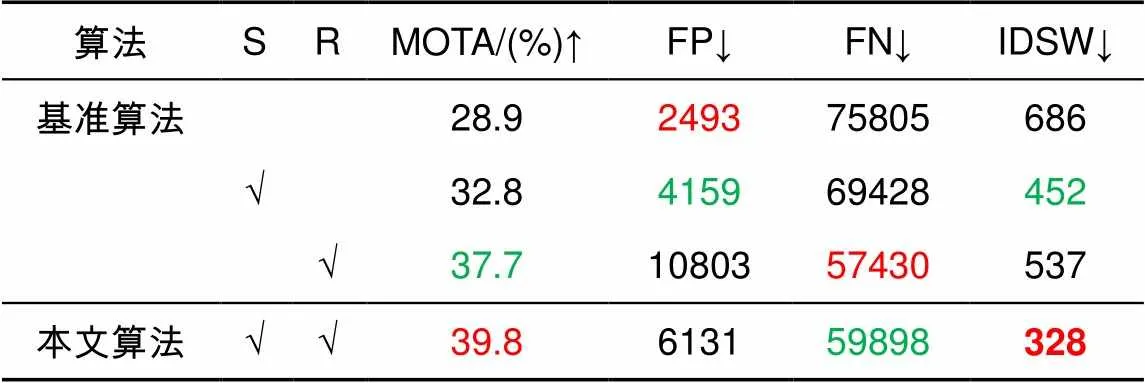
表1 在MOT16训练集上验证算法各个模块的有效性
注:最优算法性能指标记为红色,次优算法性能指标记为绿色。
表1结果展示,在基准算法中,采用Siamese网络模块实现轨迹与候选之间相似度量,可以使得算法对目标具有更好的判别能力,其中IDSW指标和MOTA指标得到明显改善;通过增加R-FCN检测网络模块,并构建基于R-FCN检测网络的候选选择模型,目标候选能够较好地从检测和预测结果中被挑选,有效地减少目标漏检问题,与基准算法相比,其中MOTA和FN指标有较大提升,MOTA指标提高了8.8%,FN指标下降幅度较大。根据表1显示,我们在推荐的算法中同时加入Siamese网络模块和R-FCN检测网络模块,可以获得最优的跟踪表现。
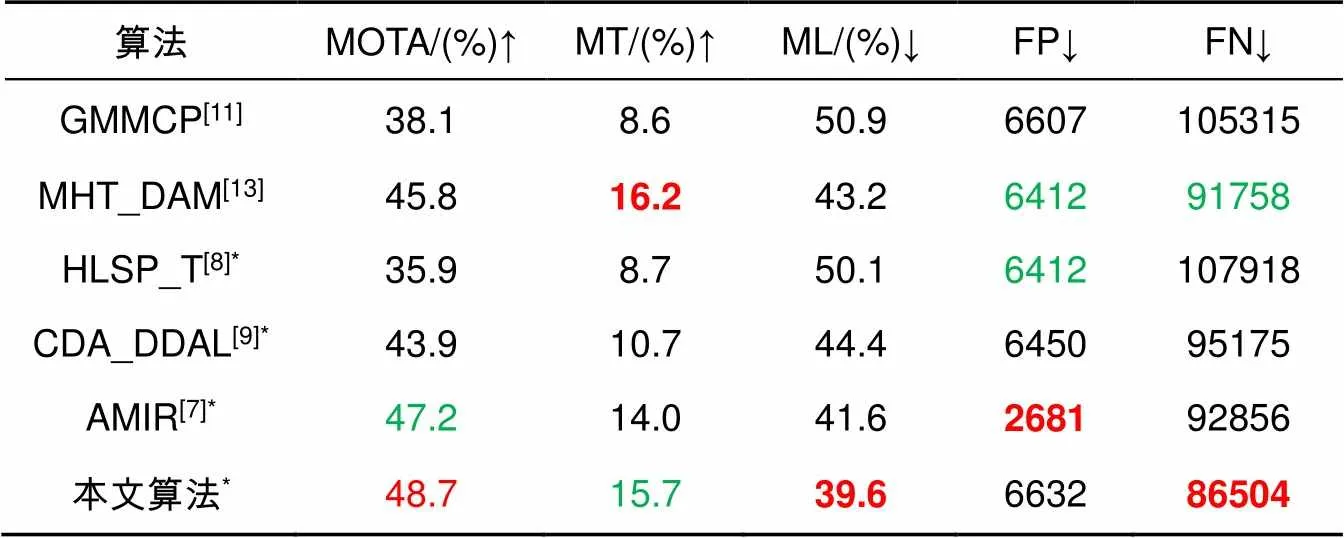
表2 MOT16测试集实验结果对比
注:最优算法性能指标记为红色,次优算法性能指标记为绿色。
3.2.3评估算法
与其他五种算法的对比结果见表2。带星号的方法表示在线跟踪,文献[11,13]属于离线跟踪,五种对比算法的实验数据由相关文献提供。表中加粗数据为最优数据,评价指标箭头向上表示值越大性能越好,箭头向下则相反。对于MOTA和MT,其数值越高越好,而FP和FN越小越好。
由表2可知,本文算法在跟踪准确率MOTA、真实跟踪轨迹数量MT、丢失跟踪轨迹数量ML和目标漏检FN等多个性能指标上处于明显优势,对于复杂场景下检测结果丢失和检测漂移等问题处理能力较强,这主要归功于本文算法建立了候选选择模型,目标候选数据不再仅仅依靠目标检测器提供,可以通过KF预测提供的候选框进行数据关联,从而提高了目标数据关联的成功率,减少目标漏检和检测漂移对跟踪结果的影响。此外,为了进一步解决目标丢失、提高跟踪准确率和保证跟踪实时性,每隔5帧采用RANSAC方法对轨迹进行一次优化处理,利用同一条轨迹上前后帧位置信息,恢复丢失目标位置信息,使跟踪轨迹更加连续更加平滑。
表3展示了本文算法与上述其他几种算法的运行时间对比结果,采用跟踪速率(单位为f/s)(frames per second,FPS)衡量每种跟踪算法的运行速率,即每秒钟可以处理视频序列的帧数,计算方式为处理的视频总帧数除以相应的处理时间。GMMCP、MHT_DAM、CDA_DDAL以及AMIR等几种算法的运行速率相差不大,并且每秒处理速率都不大于一帧,HLSP_T和本文算法运行速率分别为4.8 f/s和9.7 f/s,在运行速率上更占优势。同时从表2中记录的各个算法在多个跟踪性能指标上来看,AMIR、MHT_DAM和本文算法的跟踪表现更为突出,在这三种算法之中,本文算法在MOT16测试集上的跟踪表现最佳。本文算法之所以能取得如此好的跟踪表现,原因在于加入了候选选择模型,对目标候选框进行了有效筛选,同时采用轻量级网络SqueezeNet作为R-FCN网络框架的基本模块,大大减少模型的参数,在保证跟踪准确率情况下,平均速度仍然可以达到9.7 f/s(仅跟踪时间,不包括目标检测时间)。因此本文算法不仅在跟踪表现上有绝对的优势,而且算法也满足基本的实时性要求。
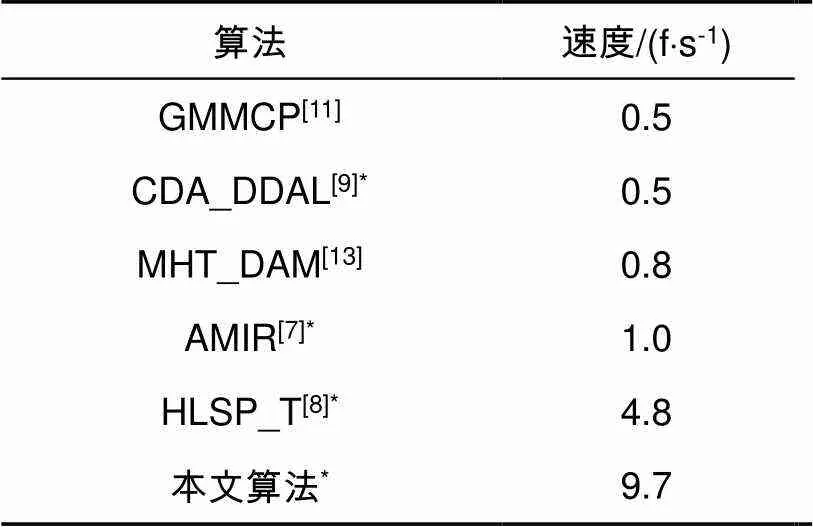
表3 不同算法跟踪速率对比
4 结 论
本文提出了一种基于R-FCN框架的多候选关联的在线多目标跟踪方法,通过加入候选选择模型,减少对检测结果的依赖,有效地改善了目标漏检和短时间遮挡情况下跟踪问题;采用Siamese网络框架实现基于外观特征的相似性度量以提高复杂场景下目标判别能力;用RANSAC算法对已有的轨迹进行优化,从而更进一步地解决检测结果可靠性、目标漏检等问题。实验结果表明,与目前已有算法相比,提出的方法在多个跟踪性能指标处于优势。提出的算法不仅可以应用在行人检测与跟踪的场景,还可以推广到包含多个不同类型目标的复杂跟踪场景,应该注意到对于多种不同类型的目标进行数据关联需要采取同一类型目标之间进行数据关联,减少计算复杂度和匹配失败率。然而,在复杂的场景中使用该方法,还存在多方面的挑战,比如目标被大部分遮挡时难以保证目标被稳定地跟踪,这些问题是后续研究的重点。
[1] Ren S Q, He K M, Girshick R,. Faster R-CNN: towards real-time object detection with region proposal networks[J]., 2017, 39(6): 1137–1149.
[2] Redmon J, Divvala S, Girshick R,. You only look once: Unified, real-time object detection[C]//(), Las Vegas, 2016: 779–788.
[3] Liu X, Jin X H. Algorithm for object detection and tracking combined on four inter-frame difference and optical flow methods[J].2018, 45(8): 170665.
刘鑫, 金晅宏. 四帧间差分与光流法结合的目标检测及追踪[J]. 光电工程, 2018, 45(8): 170665.
[4] Bewley A, Ge Z Y, Ott L,. Simple online and realtime tracking[C]//(), Phoenix, 2016: 3464–3468.
[5] Wojke N, Bewley A, Paulus D. Simple online and realtime tracking with a deep association metric[C]//(), Beijing, 2017: 3645–3649.
[6] Thoreau M, Kottege N. Improving online multiple object tracking with deep metric learning[Z]. arXiv: 1806.07592v2[cs:CV], 2018.
[7] Sadeghian A, Alahi A, Savarese S. Tracking the untrackable: Learning to track multiple cues with long-term dependencies[Z]. arXiv: 1701.01909[cs:CV], 2017.
[8] Baisa N L. Online multi-target visual tracking using a HISP filter[C]//, Funchal, 2018.
[9] Bae S H, Yoon K J. Confidence-based data association and discriminative deep appearance learning for robust online multi-object tracking[J]., 2018, 40(3): 595–610.
[10] Milan A, Schindler K, Roth S. Multi-target tracking by discrete-continuous energy minimization[J]., 2016, 38(10): 2054–2068.
[11] Dehghan A, Assari S M, Shah M. GMMCP tracker: Globally optimal generalized maximum multi clique problem for multiple object tracking[C]//(), Boston, 2015: 4091–4099.
[12] Qi M B, Yue Z L, Shu K,Multi-object tracking using hierarchical data association based on generalized correlation clustering graphs[J]., 2017, 43(1): 152–160.
齐美彬, 岳周龙, 疏坤, 等. 基于广义关联聚类图的分层关联多目标跟踪[J]. 自动化学报, 2017, 43(1): 152–160.
[13] Wen L Y, Li W B, Yan J J,. Multiple target tracking based on undirected hierarchical relation hypergraph[C]//, Columbus, 2014: 1282–1289.
[14] Zagoruyko S, Komodakis N. Learning to compare image patches via convolutional neural networks[C]//(), Boston, 2015: 4353–4361.
[15] Dai J F, Li Y, He K M,. R-FCN: Object detection via region-based fully convolutional networks[Z]. arXiv: 1605.06409[cs:CV], 2016.
[16] Iandola F N, Han S, Moskewicz M W,. SqueezeNet: Alexnet-level accuracy with 50x fewer parameters and < 0.5 MB model size[Z]. arXiv: 1602.07360[cs:CV], 2016.
[17] He K M, Zhang X Y, Ren S Q,. Spatial pyramid pooling in deep convolutional networks for visual recognition[Z]. arXiv: 1406.4729[cs:CV], 2014.
[18] He K M, Zhang X Y, Ren S Q,. Deep residual learning for image recognition[C]//(), Las Vegas, 2016: 770–778.
[19] Zheng L, Shen L Y, Tian L,. Scalable person re-identification: A benchmark[C]//(), Santiago, 2015: 1116–1124.
[20] Bernardin K, Stiefelhagen R. Evaluating multiple object tracking performance: the CLEAR MOT metrics[J]., 2008, 2008: 246309.
Multi-candidate association online multi-target tracking based on R-FCN framework
E Gui, Wang Yongxiong*
School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China
Candidates selection flow chart
Overview:As the application basis of human behavior recognition, semantic segmentation and unmanned driving, multi-target tracking is one of the research hotspots in the field of computer vision. In complex tracking scenarios, in order to track multiple targets stably and accurately, many difficulties in tracking need to be considered, such as camera motion, interaction between targets, missed detection and error detection. In recent years, with the rapid development of deep learning, many excellent multi-target tracking algorithms based on detection framework have emerged, which are mainly divided into online multi-target tracking method and offline multi-target tracking method. The multi-target tracking framework process on the basis of detection is as following: the target is detected by the off-line trained target detector, and then the similarity matching method is applied to correlate the detection target. Ultimately, the generated trajectory is continuously used to match the detection result to generate more reliable trajectory. Among them, online multi-target tracking methods mainly include Sort, Deep-sort, SDMT, etc., while offline multi-target tracking methods mainly include network flow model, conditional random field model and generalized association graph model. The offline multi-target tracking methods use multi-frame data information to realize the correlation between the target trajectory and the detection result in the data association process, and can obtain better tracking performance, simultaneously. Unfortunately, those methods are not used to real-time application scenarios. The online tracking methods only use the single-frame data information to complete the data association between the trajectory and the new target which is often unreliable, thus the data association of the lost target will be invalid and the ideal tracking effect cannot be obtained. For purpose of solving the reliability problem of the detection results, an online multi-target tracking method based on R-FCN framework is proposed. Firstly, a candidate model combining Kalman filtering prediction results with detection results is devised. The candidate targets are no longer only from the detection results, which enhances the robustness of the algorithm. Secondly, the Siamese network framework is applied to realize the similarity measurement with respect to the target appearance, and the multiple feature information of the target is merged to complete the data association between multiple targets, which improves the discriminating ability of the target in the complex tracking scene. In addition, on account of the possible missed detection and false detection of the target trajectory in the complex scene, the RANSAC algorithm is used to optimize the existing tracking trajectory so that we can obtain more complete and accurate trajectory information and synchronously the trajectories are more continuous and smoother. Finally, compared to some existing excellent algorithms, the experimental result indicates that the proposed method has brilliant performances in tracking accuracy, the number of lost tracks and target missed detections.
Citation: E G, Wang Y XMulti-candidate association online multi-target tracking based on R-FCN framework[J]., 2020, 47(1): 190136
Supported by National Natural Science Foundation of China (61673276, 61703277)
* E-mail: wyxiong@usst.edu.cn
Multi-candidate association online multi-target tracking based on R-FCN framework
E Gui, Wang Yongxiong*
School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China
Online multi-target tracking is an important prerequisite for real-time video sequence analysis. Because of low reliability in target detection, high tracking loss rate and unsmooth trajectory in online multi-target tracking, an online multi-target tracking model based on R-FCN (region based fully convolutional networks) network framework is proposed. Firstly, the target evaluation function based on R-FCN network framework is used to select more reliable candidates in the next frame between KF and detection results. Second, the Siamese network is used to perform similarity measurement based on appearance features to complete the match between candidates and tracks. Finally, the tracking trajectory is optimized by the RANSAC (random sample consensus) algorithm. In crowded and partially occluded complex scenes, the proposed algorithm has higher target recognition ability, greatly reduces the phenomenon of missed detection and false detection, and the tracking track is more continuous and smooth. The experimental results show that under the same conditions, compared with the existing methods, the performance indicators of the proposed method, such as target tracking accuracy (MOTA), number of lost trajectories (ML) and number of false positives (FN), have been greatly improved.
multi-target tracking; candidate model; Siamese network; trajectory estimation
TP391
A
鄂贵,王永雄. 基于R-FCN框架的多候选关联在线多目标跟踪[J]. 光电工程,2020,47(1): 190136
10.12086/oee.2020.190136
: E G, Wang Y X. Multi-candidate association online multi-target tracking based on R-FCN framework[J]., 2020,47(1): 190136
2019-03-25;
2019-06-27基金项目:国家自然科学基金资助项目(61673276,61703277)
鄂贵(1994-),男,硕士研究生,主要从事目标跟踪的研究。E-mail:332437798@qq.com
王永雄(1970-),男,博士,教授,主要从事智能机器人及视觉的研究。E-mail:wyxiong@usst.edu.cn
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
光学精密工程(2022年13期)2022-08-02
阅读(快乐英语高年级)(2022年6期)2022-06-17
计算机工程与应用(2022年1期)2022-01-22
新世纪智能(数学备考)(2021年9期)2021-11-24
家庭影院技术(2021年10期)2021-11-20
计算机技术与发展(2020年2期)2020-04-15
当代陕西(2019年15期)2019-09-02
火力与指挥控制(2018年3期)2018-04-19
学苑创造·A版(2018年11期)2018-02-01