
电控液滴移动的研究进展
2020-01-15 09:11:50戴浩宇董智超
高等学校化学学报 2020年1期
戴浩宇, 董智超, 江 雷
(1. 中国科学院化学研究所, 绿色印刷重点实验室, 北京 100190;2. 中国科学院理化技术研究所, 仿生材料与界面科学重点实验室, 北京 100190)
生命活动和生产技术都离不开对液体的控制, 而对液滴移动的控制又是其中非常重要的一个研究领域[1,2]. 自然界对液滴移动的控制方法是利用具有表面能梯度或结构梯度的表面驱动液滴的自发运动, 如仙人掌刺定向收集水、 猪笼草捕虫笼的口缘自发形成润滑层及蜘蛛丝的纺锤状结构收集雾气等[3~5]. 受到这些自然界生物的启发, 科学家们通过仿生设计开发出控制液滴移动的方法, 如使液体流过微针、 微槽道或纺锤节等[6~8]. 为了克服在自然界中没有外部能量摄入情况下, 液滴移动速度低、 有损耗及不可控的运动学性能等不足, 研究者使用诸如热、 光、 电和磁等外场刺激信号[9~12], 对液滴的移动进行更加全面、 灵活的操纵. 电场操控液滴具有响应速度快、 运动速度快和路径可控等优点, 使其在诸多外场刺激驱动的液滴移动策略中脱颖而出, 受到广泛关注, 并在智能微流体器件等实际应用中发挥重要作用. 利用电场作用灵活、 有效地控制表面浸润性和液滴移动的方法, 称为电润湿(Electrowetting)[13~15]. 电润湿的初步发展可以追溯到1875年, Lippmann[16]发现在汞与电解液之间施加一个电压(汞/电解液)可以观察到液体毛细上升, 并称之为电毛细现象. 基于这一现象, 此后近百年来, 研究者获得了许多发现, 如1936年, Froumkin[17]利用表面电荷改变水滴的形状; Minnema等[18]在1980年研究了聚乙烯高压电缆中的水树枝化的机理. 1981年, 电润湿一词由Beni和Hackwood[19]首次提出, 用于描述一种新型显示器设计时所使用的效应. 然而, 水在几百毫伏以上的电压下会发生电解水反应, 从而对相关研究产生阻碍. 为了解决这一问题, 1993年Berge等[20]在原有的电润湿装置中的导电液体与电极之间引入了一层薄的绝缘层, 避免了水的电解. 这种电润湿装置被称为电介质上的电润湿(Electrowetting on dielectric, 简称EWOD). 20余年来, EWOD的快速发展使电控液滴移动的各项性能均提高到了较高水平[21~26]. 随着超疏水、 超亲水等超浸润性表面的制备和快速发展[27~36], EWOD以外的新型电控液滴移动策略如静电操纵液滴[37]和表面电荷密度梯度引导液滴[38]的研究开始引起广泛关注. 本文对传统电润湿驱动液滴移动的基本原理和研究进展进行了综合概述, 简单介绍了新型电控液滴移动的代表性成果, 总结了相关研究的规律并展望了相关应用的发展前景.
1 传统电润湿驱动液滴移动
近百年来, 电润湿一直是电控液滴移动的传统策略. 电润湿在光滑平面、 电介质以至粗糙电介质上的基本原理逐渐得到发展, 液滴在电润湿的驱动作用下可以在电介质及其它界面上移动, 甚至于在数字微流体上完成电控退润湿, 本部分将对以上内容进行概述.
1.1 电润湿的基本原理
对于一个在一定的压力和温度下的固-液-气系统, 液滴可以在界面张力下达到平衡, 其平衡接触角可以用Young’s方程来描述:
(1)
式中:θY(°)为Young’s接触角;γSV,γSL和γLV(N/m)分别为固-气、 固-液和液-气界面的张力.
当施加一个电场时, 水滴的平衡接触角值增大, 浸润性发生改变, 这种效应称为电润湿. 最初的电润湿是源于Lippmann[16]对电毛细现象的发现, 即在汞与电解液之间的电压作用下, 液体发生了毛细上升[图1(A)]. Lippmann用一个在固-液界面施加电压的平行板电容器解释了这一现象. 积累的电荷改变了固-液界面张力, 可表示为

(2)

(3)
式中:σe(c/m2)为表面电荷密度;V(V)为施加电压;CH(F/m2)为电双层每单位面积的电容.
根据式(2)和(3)得到
(4)
式中:γSL和γSL0(N/m)分别为施加和不施加电压时的固-液界面张力. 这是电润湿的初始方程, 也是目前电润湿研究发展的基础. 由式(4)可知, 在固/液相组成不变的情况下, 固-液界面张力随液-固界面电压的增大而减小[图1(B)].

Fig.1 Schematic diagrams of the electrocapillary and electrowetting(A) Initial electrocapillary phenomenon; (B) water shape change on the metal surface under an applied voltage; (C) electrowetting on smooth insulator surface; (D) electrowetting on rough insulator surface.
为了避免水在电润湿过程中发生电解, Berge[20]在电润湿装置中的液体与电极之间引入了绝缘体[图1(C)], 并由式(1)和(4)分析推导出接触角的演化过程:

(5)
式中:θ和θ0(°)分别为施加和不施加电压时的接触角. 考虑到如下关系:
(6)
式中:ε0和ε1(F/m)分别为真空和液体的介电常数;d(m)为绝缘层厚度. 电润湿方程为

(7)
式(7)中的末项为电润湿常数(η):

(8)
即静电势与液-气界面张力之比. 式(7)首先由Berge通过能量最小化法在不存在电荷捕获的情况下得到, 也称为Lippmann-Young方程. 若存在电荷捕获对水溶液电润湿现象的影响[39], 则电润湿方程中应加入VT值, 调整为

(9)
式中:VT(V)为需要补偿电荷捕获影响的电压, 即电润湿临界电压.
在实际应用中, 几乎所有的基底都是粗糙的, 具有一些微/纳米尺度的结构, 无论是否施加电压都可以增强基底表面的浸润性. 2006年, Herbertson等[40]研究了具有特氟龙涂层的SU-8粗糙表面的接触角随电压的变化[图1(D)], 并结合Wenzel方程和Lippmann-Young方程解释了电润湿现象:
cosθe=R(cosθ0+η)
(10)
式中:R为特氟龙涂层表面的粗糙度. 如果电压被移除,η=0, 上述方程可以简化为Wenzel方程. 2008年, Zhao等[41]进一步泛化了电润湿方程以适合Cassie-Baxter方程的形式:
cosθe=R1f1(cosθ0+η)-f2
(11)
该方程描述了电润湿过程中液-气-固界面接触角的变化. 当η=0时, 式(11)可以简化为有粗糙度的Cassie-Baxter方程; 如果固体与液体之间的粗糙度不考虑, 即R1=1, 则式(11)简化为同质表面的Cassie-Baxter方程; 而对于没有封闭气穴的粗糙表面,f2=0, 式(11)简化为Wenzel方程; 用相似的处理方法, 对于光滑表面而言,R1=f1=1,f2=0, 式(11)简化为Lippmann-Young方程.
通过电润湿, 可以在变化的二维阵列电极或表面上实现液滴驱动, 如分离、 合并、 混合和运输. 由于具有原位控制、 响应速度快、 操纵灵活及能耗低等优点, 电润湿技术在光学、 显示、 芯片实验室、 打印和分离等微流体领域得到了广泛应用[42~46].
1.2 电介质上的电润湿驱动液滴移动
电介质上的电润湿是一个用于控制微尺度的流体运动以创造、 运输、 切割和合并液滴的重要工具, 在液滴驱动、 液体运输、 液体透镜、 显示器件和打印等微流体领域中具有广泛的应用前景[47~56]; 而这些应用的基础研究背景主要是基于电介质上的电润湿驱动的液滴移动.

Fig.2 Droplet motion controlled by EWOD in microfluidic chip with solid insulation layer(A)[57] and with liquid insulation layer(B)[58]
对于一个停留在绝缘层上的液滴, 仅在其一侧施加电场会造成液滴两侧表面张力的不平衡, 从而驱动液滴的整体流动, 这就是电介质上电润湿驱动液滴移动的原理. Pollack等[57]构建了基于电介质上的电润湿驱动液滴移动的微流体装置. 液滴被夹在2个电极平面之间, 上面板包含一个连续的接地电极, 而下面板则包含一组独立可寻址的控制电极, 每个控制电极的大小略小于液滴, 当液滴集中在一个电极上时, 也会轻微地覆盖所有相邻的电极[图2(A)]. 2个面板表面都是疏水的, 控制电极与液体绝缘. 对与液滴部分重叠的下面板上的电极施加足够电压, 产生的表面能梯度会使液滴移动, 使其与带电电极对齐. 通过连续电极转移, 液滴可以在阵列内任意2个电极之间运输. 由于控制电极与液体绝缘, 通电产生的热量和电化学反应都被阻止了. 由于其微驱动装置的基本结构相同, 不同的驱动电压与电极排列方式的组合可以使该装置完成其它操作, 如从较大的原液滴中分离、 合并或分配微液滴.
基于Pollack等[57]提出的利用电介质上的电润湿开发的灵活的微流体系统允许液体以液滴的形式在固体表面运输, 但难以克服液滴与固体表面接触、 黏附而导致的损失或污染. Velev等[58]开发了一个液-液微流体系统[图2(B)], 将微升或纳升尺寸的水或碳氢化合物液滴悬浮在密度更高的全氟化油上, 并通过油相下的阵列电极施加交流或直流电场, 激发出介电泳力, 将可极化的液滴吸引到高场强的区域, 从而实现液滴无损、 高速、 定向的理想运输. 这些微流体芯片的构筑模型可以为微尺度液体运输、 混合或分装等重要生产过程提供新策略.
1.3 其它界面上的电润湿驱动液滴移动
电润湿驱动的液滴移动不仅可以发生在数字微流体装置中, 还可发生在其它界面上. Liu等[59]提出了电化学电位诱导的水下油滴运动. 油滴在正电压下黏附在聚吡咯表面, 油滴的水下接触角随着黏附力的减小而增大, 并在重力作用下在还原的聚吡咯膜上向下滚动, 在膜上施加一个正电压可以再次使油滴停止. Tian等[60]在梯度多孔聚苯乙烯(PS)膜上实现了电场诱导的水下油滴定向移动. 当水下油滴停留在梯度多孔PS膜表面时, 油滴两端压力不平衡, 使油滴形状不对称[图3(A)]. 提高电压可以有效减小油滴与梯度结构表面的接触面积, 克服多孔PS膜表面的黏性阻力. 一旦超过临界电压, 水下油滴就可以从大孔隙区域向小孔隙位点定向连续移动. 该工作为连续驱动和控制水下液滴的定向移动提供了途径, 为进一步在电流体显示和其它微流体器件中的应用提供了依据.

Fig.3 Electrowetting controlled underwater droplet motion(A) Electric field and gradient microstructure cooperatively drive underwater oil droplet for directional motion[60]; (B) electric field induced unidirectional motion of an underwater fluid droplet on a porous structured wire[65].
此外, 液滴在楔形表面和功能纤维上的电润湿也有相关报道[61,62]. Mugele等[63,64]研究了液滴在纤维上从蛤壳到酒桶形状的可逆转变, 并证明了这2种形态的稳定性极限, 这对设计用于各领域的功能材料具有指导意义. 最近, Yan等[65]提出了一种通过电场诱导的黏附转变和浮力相结合, 在多孔聚苯乙烯(PS)覆膜铜线表面收集和单向运输水下油滴或气泡的策略[图3(B)]. 多孔PS覆膜铜线可以在未施加电压的情况下捕获并持有一个水下油滴或气泡, 也可以在电压大于其临界电压的情况下让水下油滴或气泡在多孔PS覆膜铜线表面向上或向下单向移动. 该工作将有助于发展显示基于电润湿变化的器件, 用于流体收集、 操纵、 单向转移、 释放和清除.
1.4 数字微流体的电控退润湿
值得一提的是, 除了备受关注的电润湿研究在近年来得到了长足发展, 有关电控退润湿甚至电控退润湿后液滴再润湿的研究同样取得了显著成果并引起了广泛关注. Li等[66]将含有十二烷基三甲基溴化铵(DTAB)的水滴(pH=7)铺展在高度掺杂硅片的光滑表面上. 基底上的天然硅氧化物具有足够的亲水性, 可以使水滴很容易在其上面润湿, 2 nm的厚度也不会使导电基底绝缘. 液滴中含有由带电的亲水基团和中性的疏水尾区组成的离子表面活性剂, 当施加直流电压(或电流)时, 电流流过导电液体, 在液滴内形成电场, 离子表面活性剂分子在电场作用下会向基底移动或远离基底, 分别使液滴在基底表面上退润湿或再润湿(图4). 在润湿过程中, 随着接触线的前进, 被吸附的表面活性剂分子从液滴外的新鲜表面被吸回液滴, 使该过程具有可逆性, 可以实现液滴的定向移动. 该系统既不需要增加电介质层, 也不需要疏水性涂层, 又有利于简化设备和降低成本.

Fig.4 Droplet transportation realized by ionic-surfactant-mediated electrodewetting mechanism[66](A) Mechanism of a DTAB-containing aqueous droplet dewetting and rewetting on a conductive and hydrophilic silicon substrate by a reversible electric field; (B) dewetting the third reservoir electrode from left results in necking of the reservoir droplet; (C) sets of four sequential images showing droplet transportation by electrodewetting.
2 新型电控液滴移动
传统的电润湿策略在数十年来得到的发展已经将控制液滴移动的各方面性能都提高到了较高水平. 随着科学技术的不断发展, 新型的电控液滴移动策略脱颖而出, 如静电操纵液滴可控高速运动和表面电荷密度梯度引导液滴移动, 本部分将对新型电控液滴移动的代表性成果进行介绍.
2.1 静电操纵液滴可控高速运动
以电润湿原理为基础的数字阵列化电极微流体装置已被证明可以有效控制液滴移动, 而如电晕放电、 摩擦起电等无回路、 非接触式的静电作用则可使物体极化[67,68], 也可提供强大的动力[69,70], 同样可以控制液滴的移动. Dai等[37]提出了一种高速、 可控、 无损的“全能型”液滴操纵策略, 即在静电场的作用下, 实现液滴在超疏水表面上任意方向的运动和停止/钉扎. 同时, 利用平面外的静电充电方法, 实现了液滴启动状态和停止状态的可控动态转换. 利用这种新型的电控液滴移动策略, 可实现超疏水平面上路径可控的弧线形运动和定向的液滴移动、 融合(图5). 这种静电操纵策略将有助于提高液体无损运输的速度, 减少摩擦, 降低不必要的黏附, 开拓了液滴控制技术在各领域应用的可能性, 如组合化学和生化检测等.
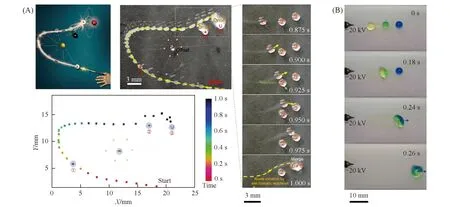
Fig.5 Controllable high-speed electrostatic manipulation of water droplet[37](A) Digital in-plane electrostatic fluidic operations displaying droplet motion in a desired “snooker” style path; (B) Directional droplet merging achieved by electrostatic charging.
静电操纵液滴移动的策略不仅可以实现液滴在平面内的可控高速运动, 还可以实现液滴从平面向外的弹道发射运动. 受到球孢子从蘑菇表面发射的启发[71], Li等[72]证明了预置在超疏水表面上的液滴可以通过瞬时的静电作用实现高速的弹道式跳跃. 利用这种策略, 水、 过冷水甚至有黏性的乙二醇等液滴均可以从超疏水表面上发射, 并可以通过调整液滴在静电场内的位置来精确控制液滴发射方向(图6). 利用简单的静电作用, 即能获得超洁净的超疏水表面.

Fig.6 Ballistic jumping drop on superhydrophobic surface via electrostatic manipulation[72](A) Schematic demonstrating the droplet jumping off the surface along the electric field line motivated by an electrostatic tip; (B) droplet centroid positions during the ballistic jumping process; (C) high speed image sequences of the left tilted, vertical and right tilted jumping droplet from top view and side view.
图7将传统的电润湿与新型的静电充电策略进行了对比. 首先, 从浸润状态看, 电润湿是将一个半球形的液滴在亲水态与疏水态之间转换, 液滴与基底是部分润湿的[73~75]; 静电充电是将一个球形的液滴在高黏附的Cassie-Wenzel过渡态与低黏附的Cassie态之间进行转换, 液滴与基底是完全不润湿的. 其次, 从运动性能看, 电润湿驱动的液滴是在基底上电极之间非连续地滑动, 要消耗能量克服一定的摩擦阻力, 路径由电极位置决定[76~79]; 静电充电驱动的液滴则是在基底上连续滚动, 耗能低, 可以根据需要在任何路径上快速无损地移动或急停. 最后, 从设备需求方面看, 电润湿驱动液滴需要一套完整的数字电路微流体装置, 至少要2个或多个电极, 在液滴移动过程中需要液滴与电极上的电介质保持接触[80~83]; 静电充电驱动液滴仅需一个放电电极, 甚至可以用一根摩擦过的带电短棒作为动力源, 在液滴移动过程中不与液滴接触. 综合以上因素, 尽管电润湿控制液滴移动在精准性和数字化程度上占有一定的优势, 但新型的静电操纵液滴移动策略因其快速、 无损、 可控的全能型特点, 成为一种被认可的、 可以选择的电控液滴移动方法, 有望在未来得到深入研究.
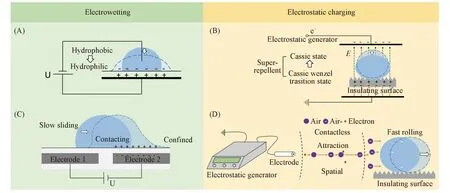
Fig.7 Schematic diagrams of the comparison between electrowetting and electrostatic charging(A) and (B) Differences in droplet wetting states changing in vertical directions; (C) and (D) differences in operating skill and droplet motion properties in horizontal directions.
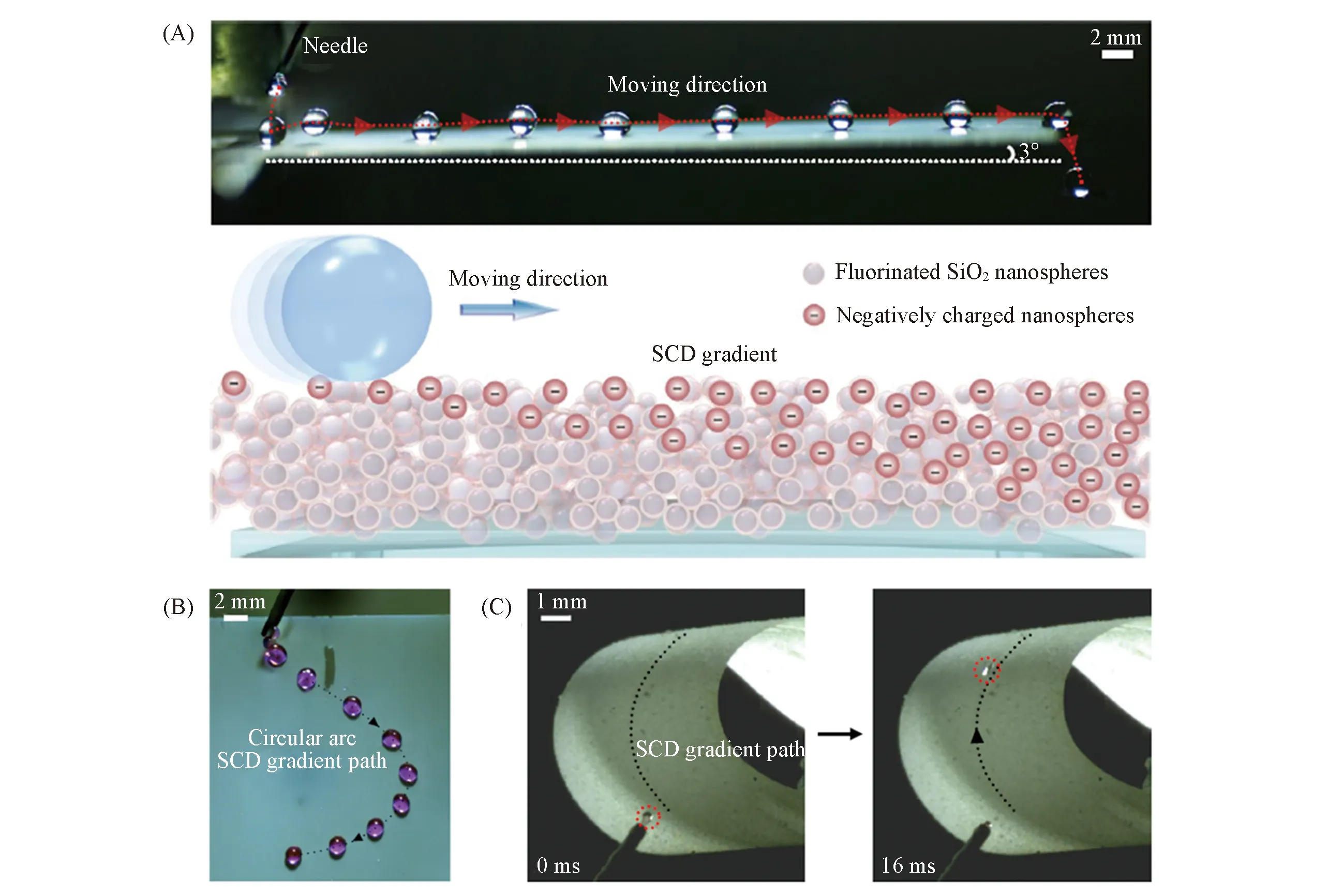
Fig.8 Droplet transport mediated by surface charge density gradient[38](A) Droplet self-propulsion on a superhydrophobic surface decorated with an SCD gradient; (B) the time-lapse trajectory of circular arc droplet motion guided by a circular arc SCD gradient path; (C) droplet transport on flexible surfaces with an SCD gradient.
2.2 表面电荷密度梯度驱动液滴移动
除了用非接触的静电充电控制液滴移动的策略, 近期, 一种在超疏水表面上预设具有表面电荷密度梯度(SCD)的路径来引导液滴移动的方法引起了关注. 如图8所示, Sun等[38]通过控制撞击高度的连续变化, 打印出具有表面电荷密度梯度的特定路径, 引导水滴的自推进, 实现了液滴在不依靠外部能量供给的情况下快速、 长程、 无损的运输. 除了平面上直线的电荷密度梯度路径, 液滴还可以实现在弧线电荷密度梯度路径上的移动以及曲面电荷密度梯度路径上的移动. 这种打印表面电荷的方法可以用于开发新的传感和驱动系统, 包括芯片实验室、 微流体器件和生物液滴分析装置.
因基底带电而对液滴产生黏附性的变化的相关工作此前也有报道. Zhao等[84]提出了通过直流偏压实现水滴在超疏水二氧化锰纳米管阵列(MTA)薄膜上的电可调黏附. 这归因于水滴与二氧化锰纳米管阵列之间接触时, 水滴的几何变化和三相接触线的连续性依赖于极性[85], 而阴极处的表面黏附力比阳极处大得多[图9(A)]. 而利用表面打印电荷的策略, Sun等[38]设计了无枪头式移液枪, 可用于低表面能、 高黏度液滴的无损转移[图9(B)].

Fig.9 Controllable transfer of a water droplet between superhydrophobic MTA membranes(A)[84] and charged surfaces(B)[38]
3 总结与展望
电控液滴移动是一种通用、 高效、 灵活地利用电场作用驱动并控制液滴运动的策略, 经过140余年的发展, 液滴移动已达到原位可控、 方向任意及高速无损的极高水平. 本文从发展历程、 基本原理到先进应用总结了传统电润湿驱动液滴移动的策略, 介绍了静电操纵液滴和表面电荷密度梯度引导液滴等新型电控液滴移动的代表性成果, 对于新、 老电控液滴移动策略从浸润状态、 运动特性及装置需求等方面进行了比较, 综合概述了电控液滴移动领域的研究进展. 尽管电控液滴移动的研究已经取得了显著成果, 该领域仍然存在很多基础性科学问题需要深入研究, 并通过先进的制备技术推进其发展. 如何将EWOD成熟的数字化微流体系统与静电操纵液滴、 表面电荷密度梯度引导液滴等策略结合, 开发出基底、 电极均可编程的全能型液滴操纵技术; 如何将具有先进性能的微/纳米结构超浸润表面与电响应性界面相结合, 根据不同需求控制液体流动; 如何将电场对液滴的作用克服重力的影响, 突破维度限制真正实现空间内液滴的操纵和图案化显示, 这些研究将是对界面物理化学工作者的全新挑战和机遇.
猜你喜欢
经营者(2024年1期)2024-03-19 02:02:34
煤炭学报(2021年2期)2021-03-24 02:22:32
高校化学工程学报(2020年2期)2020-06-10 08:53:26
原子能科学技术(2020年1期)2020-03-30 08:39:02
中华老年口腔医学杂志(2016年4期)2017-01-15 14:25:13
西南石油大学学报(自然科学版)(2016年6期)2017-01-15 14:14:19
汽车维修与保养(2015年2期)2015-04-17 01:30:41
武夷学院学报(2014年5期)2014-07-19 10:08:27
石油化工应用(2014年2期)2014-03-11 17:38:54
河南科技(2014年11期)2014-02-27 14:09:54
