轻武器典型闭锁机构虚拟运动仿真演示
2020-01-14 02:12陈珏霖梁振刚朱江宁
成组技术与生产现代化 2019年3期
陈珏霖,梁振刚,王 鑫,朱江宁
(1.沈阳理工大学 装备工程学院,辽宁 沈阳110159;2.朝阳师范高等专科学校 数学计算机系,辽宁 朝阳 122000)
闭锁机构是轻武器的重要组成部分,闭锁机构运动演示是武器专业课堂教学必不可少的环节[1].随着电子信息技术的发展,以三维建模、程序设计为基础的虚拟仿真技术的可行性和实用性得到肯定[2],许多高校、博物馆等逐步使用虚拟仿真技术进行辅助教学、科普活动.目前,虚拟仿真技术已经成为很多高新技术研究和课程教学的重要手段,并显示出比常规教学方法更突出的优势[3-5].虚拟仿真技术在教育培训中的应用主要可以分为:数字校园、虚拟演示教学与实验、远程教育、特殊教育和职业技能培训等[6].其中,虚拟演示教学与实验的应用居多,如虚拟仿真教学系统的开发与应用.使用虚拟仿真教学系统不仅可以大大提高教学效果,还可节省大量的实验成本[7-8].虚拟仿真教学系统通过教育信息化带动教育现代化,能够显著推进教学内容和教学模式的改革与创新.
本文针对轻武器典型闭锁机构,结合虚拟现实技术,在搭建交互控制平台的基础上,构建轻武器闭锁机构运动数学模型,并利用Unity 3D软件开发轻武器闭锁机构运动演示系统,以期为武器专业课堂教学、科普讲座等提供可视化演示平台.
1 轻武器闭锁机构
本文选取的闭锁片偏移式闭锁机构又叫鱼鳃板式闭锁机构[9],在自动武器上大量使用,是一种典型的闭锁机构.
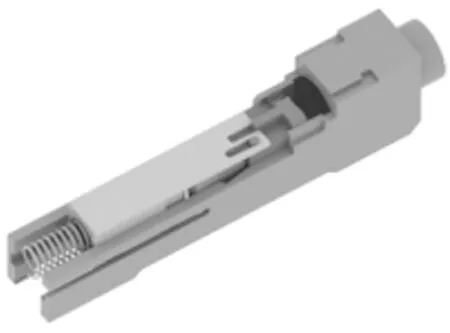
图1所示为处于闭锁状态的闭锁片偏移式闭锁机构.采用这种机构的枪机两侧各有一块可以外展的闭锁片.在闭锁状态下,机体前部闭锁斜面将左、右闭锁片挤入机匣两边的凹槽中,起封闭内膛的作用.当枪机向前关闭后膛时,在枪机机体闭锁斜面的作用下,两块闭锁片展开而抵住机匣两侧的闭锁支撑面,完成闭锁;当机体被活塞向后推时,机体开锁斜面又将两块闭锁片收拢而脱离机匣两侧的闭锁支撑面,枪机可后退开锁.
图1 处于闭锁状态的闭锁片偏移式闭锁机构
2 闭锁机构运动模型
2.1 机体及机头运动模型
2.1.1 机体及机头开锁阶段运动模型
机体在闭锁机构开锁运动中是主动件.设m1为机体组件质量,m2为机头组件质量,m3为闭锁片组件质量,则开锁运动可分为3个阶段.
第一阶段,机体受火药燃气产生的主动力FP作用.这个力是在弹丸经过身管导气孔之后,火药燃气经导气管作用在活塞杆并传递给机体组件的.导气管的导气过程如图2所示.
注:0、1、2为弹丸在身管内运动不同时刻的位置.
在这一阶段,机体还受机匣产生的摩擦力ft1、相对机头滑动产生的摩擦力f1、闭锁片产生的阻力f2作用.机体开始运动后压缩复进簧,机体受复进簧弹力Fn作用.第一阶段机体速度v1随时间的变化可表示为:
(1)
第二阶段,机体拉动机头和闭锁片运动,三者运动状态一致.此时,膛内压力下降到安全值,机头离开闭锁位置,开启枪膛,火药燃气开始外泄,机匣、机体及机头受火药燃气的主动力作用,机匣对机体、机头产生摩擦力,且机匣沿其轴线方向对闭锁片产生摩擦力fb.同时,机体受复进簧弹力作用.第二阶段机体速度v2随时间的变化可表示为:
(2)
第三阶段,火药燃气产生的主动力降低为零,在复进簧弹力和机匣摩擦力的作用下,机体虽继续前进但速度逐渐降低为零,进入下一个射击循环.第三阶段机体速度v3随时间的变化可表示为:
(3)
2.1.2 机体及机头闭锁阶段运动模型
闭锁机构的闭锁运动可分为两个阶段.机头组件在闭锁阶段的运动状态与机体组件第一阶段的运动状态一致.
第一阶段,机体组件带动机头组件与闭锁片组件运动,机体受复进簧施加的主动力作用.由弹簧特性可知,该主动力随着机体的运动而逐渐衰减,而机体带动机头和闭锁片一起运动,整体受机匣导轨产生的摩擦力作用,三者运动状态相同.该阶段机体速度v4随时间的变化可表示为:
(4)
第二阶段,机头撞击机匣急停之后,瞬间速度降低到零,而机体仍相对机头向前移动,向两侧撞开闭锁片完成闭锁,直到撞击机头而完成急停,速度降为零.机体在这一过程受机匣产生的摩擦力、机头相对滑动产生的阻力、闭锁斜面撞击闭锁片产生的轴向阻力作用.该阶段机体速度v5随时间的变化可表示为:
(5)
2.2 闭锁片运动模型
2.2.1 闭锁片闭锁阶段运动模型
针对闭锁过程,可将闭锁片组件的运动划分为两个阶段.
第一阶段,开始闭锁时,闭锁片与机体组件的运动规律一致,只需参照机体组件在第一阶段的运动情况就可以得到闭锁片在第一阶段的运动规律.
第二阶段,由于闭锁片组件的形状不规则,因此不便直接研究其运动规律.通过结构分析可知,闭锁片的运动特征可以由其绕机头旋转的支点A以及与机体组件闭锁斜面直接接触的B点的运动规律表现出来.本文将闭锁片组件的数学模型简化为以A、B为端点的一条线段(图3).

图3 闭锁片简化示意图
A点沿机头组件的圆弧部旋转,在前两个运动阶段结束后作为闭锁片绕机头旋转的中轴点,相对机匣与机头是静止的,因此主要考虑B点的运动规律即可.设B点沿机匣轴线方向为Y方向,垂直机匣轴线方向为X方向.B点在这个阶段的运动实际是沿机体闭锁斜面的运动,将B点运动路径划分成在其所在水平面上发生的X方向的位移(x)和Y方向的位移(y).这二者存在的函数关系,是由机体组件闭锁斜面结构决定的.在机头静止后,A点与机头、机匣都相对静止.随着机体组件闭锁斜面继续向前移动,B点开始沿着闭锁斜面运动.以机匣作为参考系,B点在机体闭锁斜面发生的位移为L时,闭锁斜面相对机匣轴线的倾斜角为θ(图4),闭锁片上B点沿X方向的位移为:
x=Ltanθ
(6)
线段AB的长度为a,固定不变.B点在Y方向发生的位移为:
(7)
图4 机体组件闭锁斜面结构中θ角
2.2.2 闭锁片开锁阶段运动模型
在开锁过程开始阶段,闭锁片沿机体斜面离开机匣的闭锁支撑面.可认为闭锁片在这一阶段的运动与其闭锁过程第二阶段的运动呈对称关系.在开锁的第二阶段,闭锁片在开始运动时沿闭锁斜面运动,A点和机头都相对机匣静止,B点沿机体组件闭锁斜面向内收拢.当机体组件位移为L时,闭锁片上B点沿X方向的位移为:
x=-Ltanθ
(8)
B点沿Y方向的位移为:
(9)
3 闭锁机构运动演示系统程序设计
3.1 闭锁机构三维建模
应用3D max软件建立的机头、机体、机匣及闭锁片三维结构模型如图5所示.
a—机头;b—机体;c—机匣;d—闭锁片
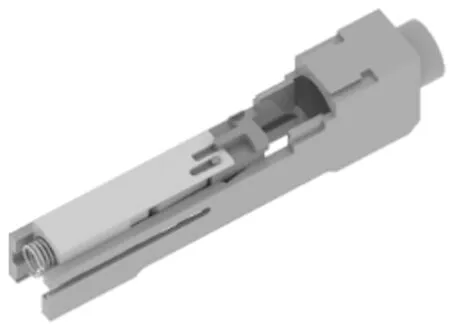
闭锁片偏移式闭锁机构三维装配模型如图6所示.
图6 闭锁片偏移式闭锁机构三维装配模型
将建好的三维模型以fbx文件格式导入Unity 3D软件中.
3.2 闭锁机构虚拟运动实现
闭锁机构各组件坐标位置与时间的对应关系可体现闭锁机构的运动过程,但需要根据运动模型计算闭锁机构各组件的位置,并通过Unity 3D软件平台来再现运动过程.
在已知轻武器中闭锁机构结构参数和其他动力学参数的条件下,根据闭锁机构开锁运动模型和闭锁运动模型,可求得闭锁机构各组件速度、时间和位移等,绑定组件三维模型后能够实现机构虚拟运动演示.
3.3 开闭锁程序设计
开闭锁程序运行流程如图7所示.
图7 开闭锁程序运行流程
以Winform程序为基础,采用C#语言编写虚拟运行程序,接入Unity 3D模块,用于机构三维模型导入和机构运动演示.
系统运行界面如图8所示.该界面左侧为功能选择区,用于选取需要演示的闭锁机构及相应演示功能;界面右侧为演示区域,提供典型闭锁机构的可视化运动演示,可实时查看机构运动状态、暂停或循环演示,并可自定观察角度.系统针对后续新机构的加入预留了接口,可实现一系列机构的运动仿真演示.
4 闭锁机构运动过程演示
闭锁机构运动演示系统中开锁过程如图9所示.

(a)静止时刻
(b)开锁过程第一阶段
(c)开锁过程第二阶段
(d)开锁过程第三阶段
闭锁过程与开锁过程运动相反,本文不再演示.
5 结束语
本文对一种典型轻武器闭锁机构关键部件进行运动分析并构建其三维模型,建立了机构开锁和闭锁过程的运动模型,应用C#语言基于Winform框架,在Unity 3D环境下开发了机构运动演示系统,实现了机构虚拟运动的可视化.该闭锁机构运动演示系统具备后续添加新机构的可拓展性,可作为武器专业课堂讲解、科普讲座等的可视化演示平台.
猜你喜欢
中国材料进展(2022年4期)2022-05-13
现代仪器与医疗(2021年5期)2021-12-02
航空发动机(2020年3期)2020-07-24
小哥白尼(军事科学)(2020年1期)2020-06-16
航空维修与工程(2020年3期)2020-04-10
小学生必读(低年级版)(2020年11期)2020-03-03
制造技术与机床(2017年3期)2017-06-23
中国塑料(2015年6期)2015-11-13
四川党的建设(2014年9期)2014-08-23
中国设备工程(2014年1期)2014-02-28