UUV水下对接技术发展现状与关键技术
2020-01-14 08:11许光
声学与电子工程 2019年4期
许光
(海装驻杭州地区军事代表室,杭州,310023)
UUV是一种无人自主式潜水器,其在执行简单枯燥并且时间很长的海洋数据收集活动方面有很大的优势。随着UUV使用的越来越广泛和频繁,也出现了一些问题,主要有两点:(1)UUV受自带能量限制而不能长时间在水下工作,需要不断上浮进行回收和投放。但在执行水面回收UUV任务时,不仅要动用大量船员和船舶的控制操作,还要考虑海面的风浪问题,特别是在大于5级浪的条件下根本难以回收。(2)由于UUV与水面船只的通信只能靠声通讯,在深海工作时,其通信效率很低,限制了对UUV新指令的传达和测量数据的上报。
为了解决这两个问题,需要在海底建立一系列UUV水下对接站,让其在深海海底就能完成能源补充和数据交换,这样可以大大减少水面回收和释放时风险并节省了上浮和下潜时间,从而提高UUV的工作效率。此外,水下对接站还是建立海洋观测网络的基础,通过UUV和水下观测站的对接,可以有效的在各个观测站之间传递能量和数据,并有可能对损坏的观测站进行水下修理。
1 国外发展现状
1.1 美国
目前美国对于UUV水下对接站的研究最多,有多个大学和研究机构开发出了较合理的水下对接系统,并且一些已经成为成熟产品,主要有Woods Hole海洋研究机构的REMUS型UUV水下对接系统;MIT和Woods Hole开发的针对Odyssey型UUV的水下对接系统;NOSC开发的有缆Free Swimmer UUV水下对接站点;NRAD开发的Flying Plug UUV水下对接系统等。
1.1.1 Odyssey UUV水下对接系统
Woods Hole Oceanographic Institution 的Hanumant Singh等人提出了使用多个Odyssey型UUV的海洋数据采样网络系统[1],如图1,该系统能在水下对接站实现UUV和控制人员之间传递信息。
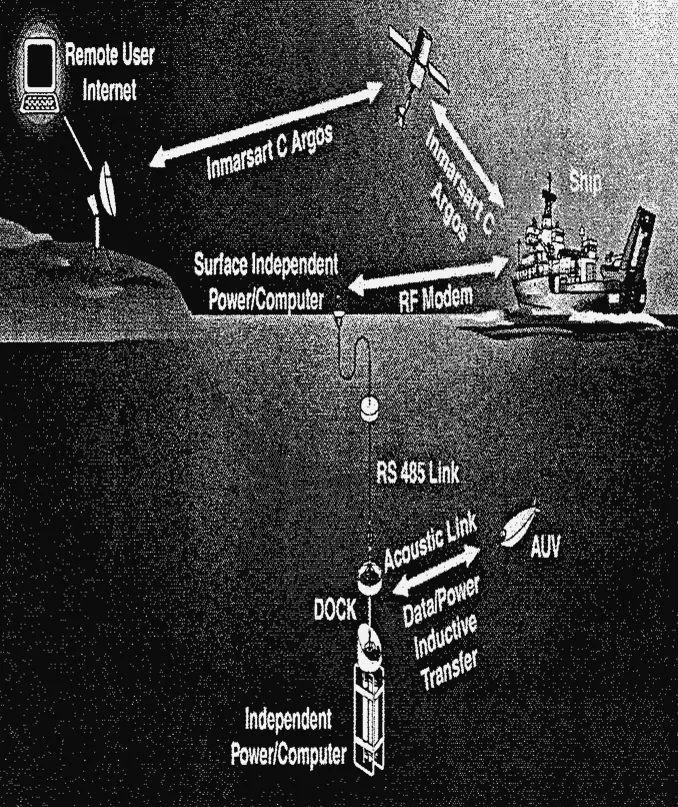
图1 海洋数据采样网络系统
该系统通过水下对接站上部的垂直缆杆将UUV机械的连接起来,声导航系统能够探测到UUV是否错过了水下对接站,自动确认UUV是否在最佳对接路径上。系统能很好的完成对接、传输数据、补充能量和释放UUV执行任务等一系列动作。一旦UUV对接上,还能周期性地检测并上传UUV的状态,同时布置新的任务,如图2。
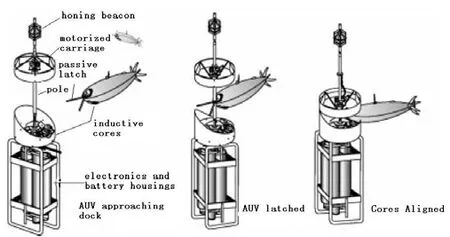
图2 Odyssey型AUV及其水下对接装置工作原理
1.1.2 Free Swimmer UUV水下对接系统
Naval Ocean Systems Center的Dale Bryan等人开发的水下对接平台是用来收集水下信息的,再通过一个有缆UUV的对接将水下平台收集到的信息通过电缆传输给水面船只储存和分析,如图3[2]。具体工作过程是水面船只发射一只线控的潜水器,操纵其靠近水下对接平台,当进入距离水下平台1 km范围内时,潜水器自带的导航声呐引导其靠近对接点。到达对接点后,操纵人员利用潜水器前部的电视摄像头来调整推进器和机械臂来完成对接动作,如图4。一旦成功对接,水下平台中的数据就能传送到水面船只了。当数据传送完成后,作为数据传送中继站的潜水器就会从对接点分离开来并返回到水面船只。
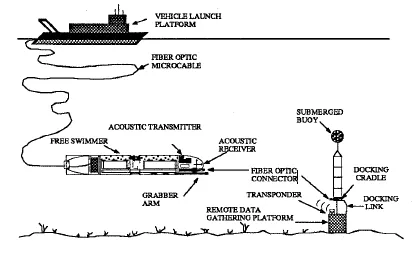
图3 Free Swimmer型UUV及其水下对接装置工作原理
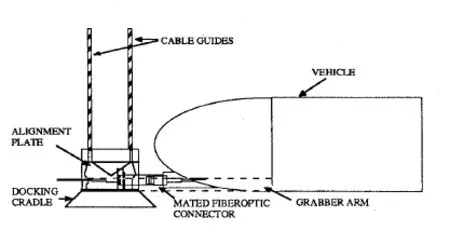
图4 Free Swimmer型UUV与水下平台对接机构
1.1.3 REMUS-100 UUV水下停泊站
Woods Hole Oceanographic Institution的Ben Allen等人设计的RMEUS-100 UUV水下停泊站就是比较成熟的产品了,如图5[3-5]。该水下停泊站的主要作用是增加了REMUS-100 UUV水下持久工作能力和执行更多的指令。
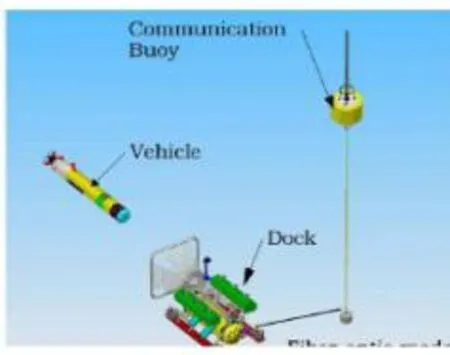
图5 REMUS-100水下机器人泊坞系统
为了完成对接,在UUV上进行了一系列改进,如装了一个感应模块的端帽,其中有超短基线(Ultra Short Baseline,USBL)数字导航声呐阵和水面航行用的潜望镜。在对接系统方面,采用直线驱动器来完成UUV和工作站的对接,当传感器判断UUV已经到达对接位置时,驱动器顶动插销锁住UUV,同时插销之间的电连接头与UUV连接为其充电或传输数据,如图6。

图6 装在水下停泊站上的直线驱动器
1.1.4 Bluefin UUV水下对接系统
该系统由MBARI研究所开发,使用USBL实现水声导引,采用导向罩结构形式对UUV进行导向,使UUV进入对接管完成对接[6]。对接装置本身可以包容UUV,在对接口附近采用渐缩形的入口装置对UUV进行引导,使其进入预定轨道实现两者的对接,见图7。
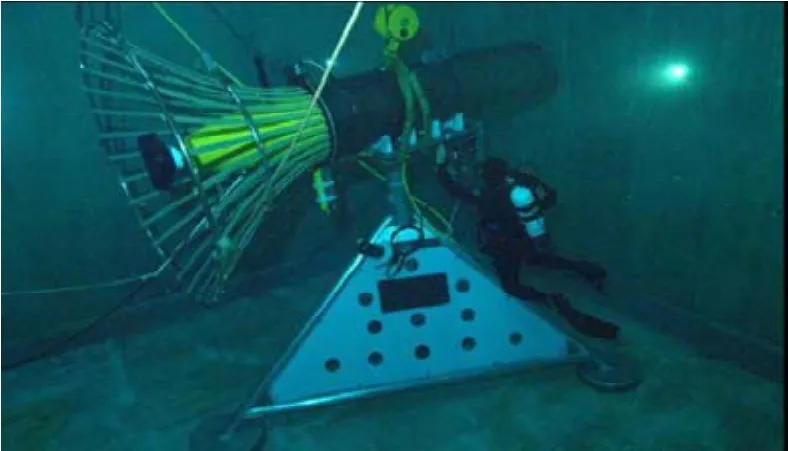
图7 Bluefin UUV对接装置
1.1.5 Flying Plug UUV水下对接系统
该系统使用声学USBL与光学检测器实现声光联合导引,示意图见图8[7]。对接站同样采用导向罩结构形式对UUV进行导向,使用光纤远程操控该航行器。
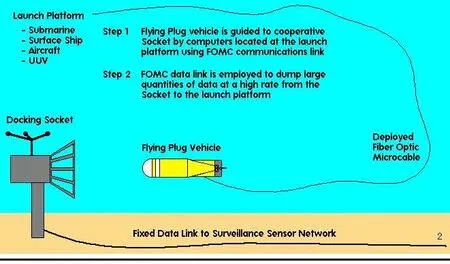
图8 Flying Plug UUV对接装置
1.2 欧洲
在欧洲方面,具有代表性的水下航行器主要是法国和英国Liverpool大学研制的Swimmer Alive系统[8],它由一个名叫“Swimmer”的UUV、一个有脐带缆的ROV(Remote Operated Vehicle)和一个水下泊坞组成。其典型工作模式是水面船只用吊车释放Swimmer UUV,在UUV上连有一个带缆的ROV,如图9,ROV初始是没动力的,仅靠UUV载着驶向海底。此过程分为三步,分别是远距离移动阶段、近距离靠近阶段和对接阶段。
(1)远距离移动阶段。UUV使用长距离定位系统(声呐)来确定其方位,并决定它的航向、速度和下潜速度。其下潜深度可达1~3 km,水平移动也可达几千米。
(2)近距离靠近阶段。当UUV在水下泊坞站30 m范围内时,会使用短距离定位系统(摄像头),然后自动靠近至0.2 m,精度在20~50 cm之间。
(3)对接阶段。UUV通过机械装置和水下泊坞站连接起来。一旦连接住了,Swimmer UUV就停止工作,转而启动ROV,并脱离UUV和水下泊坞站,通过200 m长缆绳在水下泊坞站附近进行工作。

图9 Swimmer UUV和附带的ROV组合体
1.3 日本
Tadayuki Kawasaki等人研制的 “Marine Bird”是一种实验性的UUV[9,10],已经能成功进行水下平台的对接,并且能自动补充能量,其研制的目的是为了UUV的小型化做准备。小型UUV携带的能量有限,不能长时间在水下工作,需要不断补充能量。2003年进行的海试验证了其对接装置的实用性。它的泊坞系统采用了一种全新的方式(类似于飞机着陆地面),同时在UUV上还带有两个捕捉臂,用来捕捉泊坞平台上的V型定位装置,实现最终的定位,完成UUV的能源和数据信息的驳接,如图10。
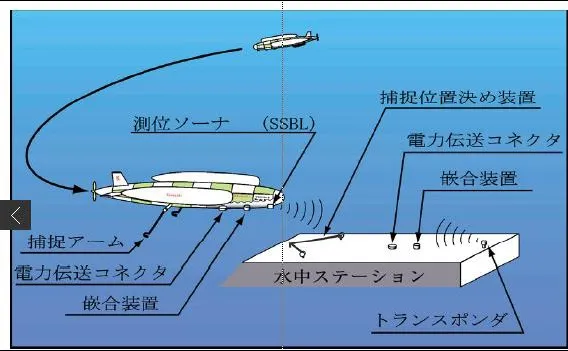
图10 Marine bird与其水下对接平台
1.4 韩国
韩国也积极进行了UUV水下对接技术的研究。Humanoid Robot Research Center的Jin-Yeong Park等人讨论了光学导航对接技术并进行了模型水池实验[11]。这个对接系统由5个导向定位灯和UUV“ISiMI”上的传感器相结合,通过“最终接近算法”和一个辅助的降噪算法,实现UUV的对接导航,如图11。但该系统只是一种对接方式的探索,并未形成完善的UUV水下对接补给站体系。

图11 利用光学导航的“ISiMI”UUV对接场景
2 我国的发展情况
随着国外水下无人航行器对接技术不断成熟,国内高校和科研机构也开始在此领域开展了研究工作。中国船舶第七一五研究所及第七O五研究所、沈阳自动化所、哈尔滨工程大学、浙江大学等单位均不同程度完成了原理探索和样机试制工作。但由于UUV水下对接技术复杂、试验困难,目前国内产品基本还处于实验室阶段的原理性研究,成熟产品较少,只有个别单位完成可用的工程化产品突破。随着“十二五”期间国家科技部海底观测网项目的研究,第七一五研究所、浙江大学等单位开展了大量UUV水下对接平台、对接控制、水声导航定位等技术的研究,并研制相关设备。试制的样机已具备UUV与海底接驳站之间的自主对接、能量补充、信息交互等功能[12-14]。

图12 第七一五研究所UUV水下对接系统试验
3 UUV水下对接关键技术
3.1 声学导引技术
水下无人航行器声学导引技术主要用于UUV与海底接驳站之间的较远距离对接导航定位。通过通信声呐系统、水声定位系统的组合,实现海底接驳装置对于UUV方位和距离的判断,并将该信息通过水声通信传给UUV。该关键技术包括通信声呐小型化和低功耗设计、水声定位技术软硬件设计、基于水声定位的UUV对接控制程序算法、对接控制策略设计等内容。
UUV使用的声学传感器一般指的是USBL,如美国REMUS 水下无人航行器就采用了高精度数字式USBL作为其对接传感器(图13)。该型USBL模块布置于UUV头部,对接引导距离达到3 000 m,分辨力小于0.5°。美海军多次海试表明,REMUS水下无人航行器在USBL的引导下能从几海里外,准确地进入直径仅为80 cm的锥形导向罩内,单次对接成功率达到60%。
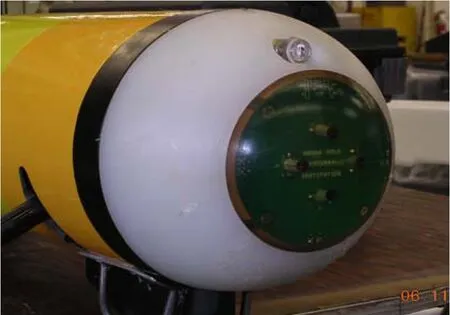
图13 REMUS头部USBL基阵
国内中国船舶第七一五研究所研制的UUV水下采用水声通信与USBL组合方式,不仅具备高精度测向(<0.5°)、测距(>3 000 m)能力,同时可进行水声通信,有利于UUV与水下对接站之间的自主控制和策略调整。

图14 第七一五研究所的USBL/水声通信基阵
3.2 光学导引技术
水下无人航行器光学对接技术用于UUV与海底接驳站之间的末端引导,实现精度不大于厘米级的自动对接。根据光学传感器提供的误差信号,判断航行器头部与海底接驳装置对接口的相对方位。该关键技术包括光学传感器的设计、光传感器的信号检测电路设计、基于光传感器的方位估计方法研究、UUV对接控制程序算法研究、光信标设计等内容。光学导引传感器受到海水清晰度的影响很大,有效作用距离很近(小于30 m),一般均要与声学传感器配合组合使用。目前基于视觉感知的AUV对接技术尚处于研制阶段,例如韩国研究机构正在研究鱼雷型UUV与锥形对接装置的视觉导航接驳技术,如图15所示[11]。整个视觉导引装置包含五盏信标灯、摄像机以及信号处理平台,作用距离10~15 m,通过图像处理来识别信标光源,从而计算出对接装置的距离和中心位置,并结合视觉伺服控制算法引导UUV进入对接口。
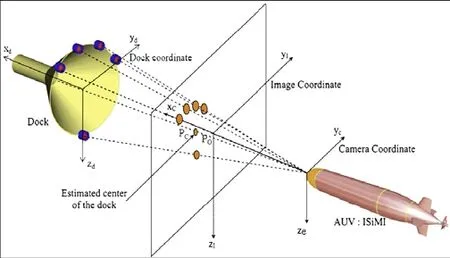
图15 “IsiMI”UUV光学导向装置
3.3 数据和能量传输技术
当UUV与海底接驳站完成对接时,为实现UUV的能源补充(充电)、任务下载、探测数据上传等功能,对接系统必须具备可靠高效的水下能量、信息传输装置。根据方式不同主要分为接触式插拔传输和非接触式感应传输两种。该关键技术包括连接器耦合的低损耗设计、精确对接机构设计、连接器及对接机构的抗腐蚀、抗海洋生物污染的设计等方面。
接触式插拔传输方式具有原理结构简单、传输稳定高效等优点,关键在于具有特殊能力的水密电连接器与配套的插拔动力装置。该套系统需要具备自动导向对正、便捷锁紧与松开、不受海水压力影响的带水湿插拔能力。图16为REMUS 水下无人航行器对接系统采用的插拔机构,图17为第七一五研究所水下对接系统的插拔装置。
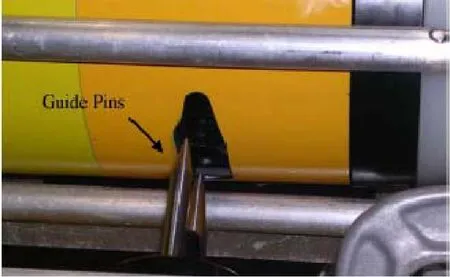
图16 EMUS UUV对接系统插拔机构

图17 第七一五研究所水下对接系统插拔传输装置
4 发展趋势
水下无人航行器作为海底观测网系统的组成部分发挥着越来越重要的作用。目前,海底观测网使用要求与UUV使用条件和使用方式产生了巨大的矛盾,因此有必要开展深海对接技术的研究,开发出一种能对UUV进行海底能源补给和信息交换的水下接驳系统[16]。通过与海底观测网节点的连接,水下接驳系统可对UUV进行电池充电、数据下载、任务更新,并为UUV提供保护性的安全停靠环境。这将大大增强海洋观测能力,未来的UUV水下对接技术发展趋势主要有以下两点:
(1)具有更高的对接可靠性和成功率。依靠快速发展的各传感器技术及智能控制技术,UUV将获得更加灵活可靠的水下对接性能。
(2)多运动平台之间的组合对接。包括多个UUV之间、UUV与USV之间、UUV与载人平台之间等的对接。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
疯狂英语·新读写(2021年6期)2021-08-05
发明与创新·大科技(2020年1期)2020-04-17
中学生英语(2017年6期)2017-07-31
制造技术与机床(2017年3期)2017-06-23
青年歌声(2017年6期)2017-03-13
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
智能制造(2016年11期)2017-01-03