
基于正负序分离的锁相环
2020-01-09 00:37李静静赵健上海市计量测试技术研究院
上海计量测试 2019年6期
李静静 赵健 / 上海市计量测试技术研究院
0 引言
随着分布式发电系统的广泛应用,大功率发电设备为社会提供的能量是可观的,因此,大功率发电设备的可靠性也是非常重要的。电网扰动器作为考核大功率分布式发电设备检测系统,将会由小功率转变到大功率。现在大功率电网扰动器大多采用并联方式来扩展自己的容量。而对各个并联单元要确保与电网的同步性,必须能够快速、准确地实现对电网基波相位、频率等信号的锁定跟踪。
锁相环可以获取电网电压的相位角,它的基本作用是获取三相电网电压正序分量的相位信号,必要时还可以提供频率、幅值信号,锁定的这些信号都会参与电力变换装置的控制过程。正因如此,锁相环的性能好坏直接影响整个电力变换装置的输出效果的优劣。
SPLL中最常用的是单步坐标系的软件锁相环(SSRF SPLL),对于三相平衡电压条件下的电网电压有比较好的锁定效果[1]。但是当电网扰动器模拟电网三相不平衡电压故障时,此时该种锁相环带宽很低,降低了系统的动态性能,在实际工程应用中不合适。文献[2]采用延时的方法去除电网电压的直流偏移量和负序分量的作用,但是延时时间是定值,当电网频率不恒定时,这种锁相效果会大打折扣。
针对大功率电网扰动器各个并联单元的同步性问题,本文研究基于双同步坐标变换的锁相环方法。当三相电压不平衡时,能够快速地使三相电压的正序和负序分离,这样正序负序的幅值、频率和相位就能分开来进行分析,通过仿真验证了该种方法的正确性。
1 SSRF SPLL在三相电压不平衡条件下的分析
图1为此锁相环的系统框图。工作原理为:把三相电压分解到旋转dq轴坐标系中,Uq的正负反映了d轴与电压U的相位关系,Uq> 0,则d轴滞后U;Uq< 0,则 d 轴超前U;Uq= 0,则 d 轴与U同相。其中,Uq表示在q轴上电网电压分量,Ud表示电网电压在d轴的分量。该系统采用闭环控制,可以调节PI参数,通过控制Uq= 0来实现输出相位与电网电压相位同步。

图1 SSRF SPLL控制模型示意
假如三相电压不平衡,根据对称分量法,对三相电网电压进行正序、负序、零序分解,则三相电压可以表示为


ω——基波电压的角频率;
根据三相静止坐标系到两相静止坐标系的变换原则,得到两相静止坐标系下电压为

零序分量经过上述两种坐标系的变换后抵消为零,这样抑制了零序分量的作用,则电网矢量在两相静止坐标系下可以描述为

式(4)表明,在αβ坐标系中,电网电压矢量us分解为以ω角速度旋转的正序分量和以-ω角速度旋转的负序分量。对αβ坐标系上的正负序分量进行dq旋转坐标系变换,其中d+1q+1坐标系旋转角度为,d-1q-1坐标系的旋转角度为-。得到电网电压矢量在两种对称旋转坐标系的表达为

式中:


由式(9)(10)可见,在正序dq坐标系下,输出的正序分量变成了直流量,负序分量变成了2ω频率的交流量;在负序dq坐标系下,输出的负序分量变成了直流量,正序分量变成了2ω的交流量。可以看出,若采用SSRF SPLL,在三相不平衡条件下,由于负序分量的作用,系统不能很好地追踪正序分量,这就对该种锁相环起了限制作用。
2 三相不平衡条件下,正负序分离闭环控制分析

在d+1q+1坐标系中,其中的振荡部分的幅值由d-1q-1坐标系中的平均值决定,而在d-1q-1坐标系中,其中的振荡部分的幅值由d+1q+1坐标系中的平均值决定。为了抑制两种坐标系中的振荡分量,这里采用了两种坐标系下的解耦结构。
根据式(11)(12),设解耦计算的变换公式为

图2是d+1q+1坐标系下的解耦部分,d-1q-1坐标系下的解耦原理与前者一致。
为了获取相应的平均值,这里采用低通滤波器(LPF)(一阶)对2ω信号进行滤除,相应表达为LPF(s)=ωf/(s+ωf)。

图2 d+1q+1坐标系下的解耦网络
整理得出整个锁相环反馈控制系统原理如图3所示,从整个原理图可以看出,为了抑制由负序分量带来的中的二次谐波分量,并且使尽可能靠近0值,信号必须通过解耦网络与PI控制器的联合控制,从而消除三相电压不平衡的作用。

图3 正负序分离的锁相环控制模型
3 MATLAB仿真分析
为验证该锁相环的性能与可行性,利用MATLAB Simulink平台搭建该锁相环模型进行仿真验证。
设置参数如下:三相输入电压幅值分别为UA=1 pV,UB= 1.3 pV,UC= 1.3 pV,其中,A 相电压相位初始相位为0°,频率50 Hz,PI控制器参数,比例系数:kp= 180,积分系数:ki= 22 500,滤波器截止频率ωf= 157 rad/s。
对三相不平衡下的锁相环进行仿真,仿真结果如图4所示,A相电压幅值低于B、C两相电压幅值,锁相环输出信号的波形与A相电压波形相位保持一致,说明三相不平衡条件下,锁相环通过正负序解耦消除了负序分量的影响。可以验证在三相电压平衡条件下,该锁相环能完成三相电压正序分量相位的追踪。
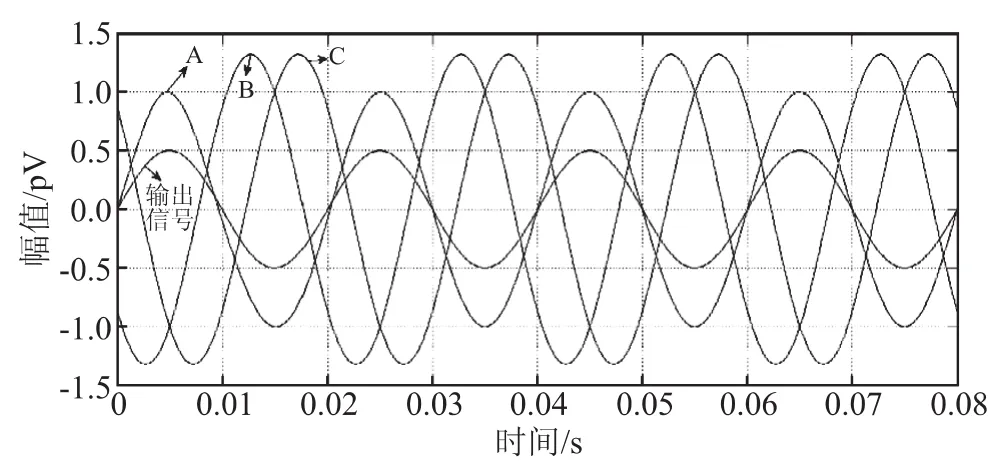
图4 三相不平衡下三相输入电压与输出信号波形
图5为鉴相器输出的正序电压Uq值的波形变化,它的动态响应可以用来判断该锁相环系统的动态响应性能。从仿真结果可以看出,Uq在PI调节器的控制下,最大浮动值为0.32左右。经过大约两个周期的调整即可变为0值并且一直保持下去,由此可以判断动态响应性能良好。

图5 正序分量值的波形
当给三相电压A相注入谐波时,此时A相电压会发生畸变。对模型进行仿真分析,仿真波形如图6所示。结果表明,虽然A相电压畸变,但是输出信号的相位能够实现对A相正序电压的完全锁相。

图6 电压畸变下输入电压与输出信号波形
图7是锁相环输出的相位波形图,可以看出第一个周期,锁相环要经过一个调整过程,相位的变化不是线性变化,在0.02 s时相位并未达到最大值,但是相差不大。在第二个周期结束时相位已经比较准确地进行锁相了,说明在第一周期的系统内部的调整过程中,系统的动态响应并非严重振荡,调节时间大约只有两个周期的时间,可见在电压畸变的情况下,锁相环的稳态性能与动态性能也是非常好的。

图7 电压畸变下输出相位的波形
4 结语
针对三相电网电压不平衡条件下锁相不准确的问题,通过采用对电网电压矢量正负序分离的锁相环的设计,能够达到精确锁相的目的。仿真实验结果表明,该种锁相环动态响应、稳态性能都比较好,对三相电压不平衡情况具有较强的抑制作用。
猜你喜欢
四川电力技术(2022年6期)2023-01-30
上海大中型电机(2021年2期)2021-07-21
通信技术(2020年12期)2020-12-23
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
电动工具(2020年4期)2020-08-20
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年15期)2019-08-27
电子制作(2019年23期)2019-02-23
西南交通大学学报(2018年6期)2018-12-18
