
重型天车无线遥控技术的应用与探讨
2020-01-09 03:29王旭东张靖苑
陕西煤炭 2020年1期
高 军,王旭东,赵 磊,张靖苑
(神东煤炭集团设备维修中心,陕西 神木 719315)
0 引言
神东煤炭集团公司设备维修中心现有天车种类繁多,存在生产厂家多、控制方式不一,手动操作(有线)容易导致断线和并线的隐患。由于天车高度较高,信息传递不便,操作人员长期工作于噪音大的工作环境,视野受光线和障碍物影响大,吊装靠地面人员手势和空中操作人员交流,定位往往不准确;对地面设备和人员的安全存在威胁等诸多不利因素。在多台天车同时作业时,安全防护主要靠人为控制,天车的各部件使用频度不能进行统计,不能及时有效地维护、改进和数据支持,天车工作时所有工作状态和场景不能进行历史数据追溯,为调查事故或故障原因造成了障碍[1-3]。为进一步提升天车运行安全性、改进系统控制可靠性、人员操作便捷性,便于设备维修保养工作进行,增添少量的硬件设备和软件系统来优化现有的控制系统,以提高天车工作的安全性、可靠性,进而提高工作效率,降低维护成本和使用成本。因此,对神东煤炭集团公司设备维修中心42台天车进行无线遥控及安全防护技术研究与应用。
1 无线遥控及激光防撞系统
1.1 无线遥控系统
系统功能:无线遥控技术应具备与天车驾驶室内手动操作相同的功能。操作者通过手持遥控器在吊具旁边控制大车、小车和吊钩的起重运行,要求操作方便,以及提高设备使用效率和安全性。
控制模式:无线遥控器的控制模式如图1所示,是由无线遥控器发送出无线信号,无线接收控制器接收发送来的指令,并通过解析指令,输出相应的控制信号到天车电气控制箱,实现对应的动作。
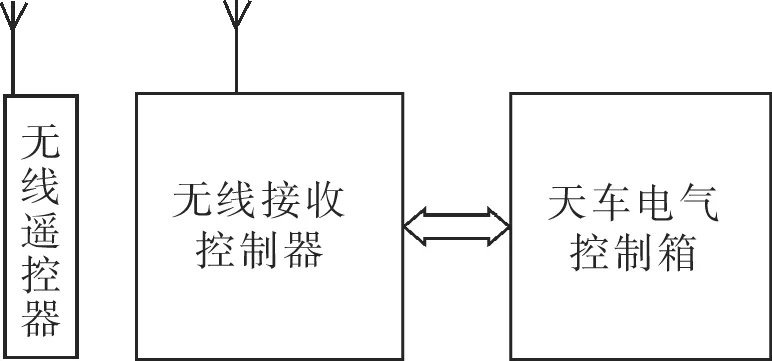
图1 无线遥控器的控制模式
接收器互换:无线遥控器与驾驶室内的手动操作通过转换开关来控制切换,无线遥控器控制系统与原有控制系统相互独立,在任何一种操作方式出现故障的情况下,另外一种操作方式可以正常使用不受影响。
1.2 激光防撞系统
系统功能:在同一个轨道上运行多台天车时,为了防止天车间的相撞事故,在天车大车的两端安装激光报警装置,在2台天车靠近到一定距离时,自动断电停止天车的运行,保证2台天车的工作安全。
控制模式:激光防撞系统的控制示意图如图2所示。目前多台天车在同一轨道运行时,是通过司机的肉眼观察,防止天车与天车之间产生碰撞,存在很大的安全隐患。要求采用激光限位技术,运行时天车与天车之间保证安全距离,同时不影响各天车的正常工作。同一个轨道上运行多台天车时,为了防止天车间的相撞事故,在天车的两端安装激光报警装置,当2台天车靠近到一定距离时,激光防撞装置感应到来自对面天车上的反光板反射的激光信号,自动断电来停止天车往此方向的运行,并发出报警声音[4-6],保证2台天车的工作安全。而向相反方向的2台天车则根据设定的安全距离,激光防撞器自动解除报警。
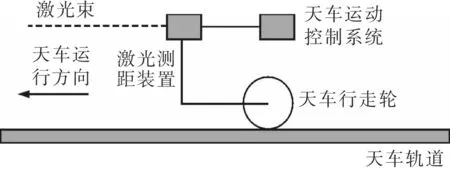
图2 激光防撞系统的控制模式
激光限位装置:各天车加装激光限位装置,在不影响各天车工作的前提下,将限位距离设置为0.25 m,保证各天车运行在安全范围之内,相互之间不发生碰撞[7-8]。避免操作者人为失误,大大提高安全生产效率。加装激光限位装置后,对原来的控制电路进行了相应改进。
2 微机监控安全、检测、控制系统设计
在天车上安装微机监控安全、检测、控制系统。系统具有以下功能:天车主要电气系统的自检和自身状态信息识别;具备检查自身各控制信号、安防信号的作用;天车上大车、小车和吊钩位置的信息识别,能够识别天车及吊钩所在的位置;能绘制天车上大车、小车和吊钩实时运行的轨迹,能记录天车的行程和统计运行时间;对天车围界进行安全视频监控;对天车的视频监控信息实现无线传输、监控及APP传送;便于今后功能的扩展,如实现天车群控等功能。要实现上述功能,主要应解决视频监控、数据采集、微机控制方面的问题。
2.1 视频监控系统
系统功能:视频监控系统主要实现对天车大车的4个行走轮和小车吊钩下的工作区域进行实时监控。因此,视频监控可安装于天车大车的4个行走轮附近和小车吊钩下,从而实现对这些工作区域的实时监控。视频监控系统可以进行录像回放和拷贝功能,为安全事件的调查提供帮助。
行走轮及吊钩下区域监控:对天车大车的行走轮进行监控的示意图如图3所示。摄像系统共有4处,每个大车轮位各一个,用来监控4个轮位轨道之间的工作状态及有无异物。对小车吊钩下面区域进行监控的示意图如图4所示。一台云台摄像机安装在天车上的小车下方,可从终端操作云台随时观察小车下的各方位图像,也可实时在天车驾驶室和无线终端或另一台PC上监视天车运行情况。视觉监控系统在天车上电后可自启进入运行模式。

图3 对天车大车的行走轮进行监控的示意图
2.2 数据采集系统
系统构成及功能:数据采集系统的示意图如图5所示。数据采集系统的功能包括:①对天车电气控制信号的采集;②对图像信号的采集。
对天车电气控制信号的采集:对天车电气控制信号的采集使用PLC(即可编程逻辑控制器)来实现,采集信号通过PLC处理后送到平板电脑中。PLC主要采集在无线遥控器控制下天车工作时的工作状态,例如,电源,急停,大车、小车、吊钩的位置坐标信号;大车、小车和吊钩的启动自检。PLC在天车电源上电时自行开始工作,保证数据监控与天车工作同步[9-10]。

图4 对小车吊钩下的工作区域进行监控的示意图
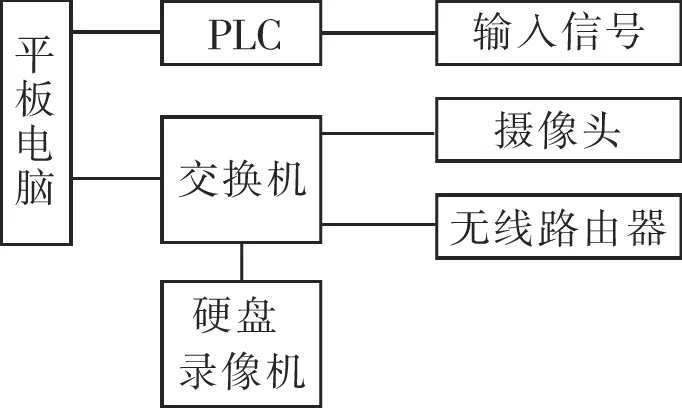
图5 数据采集系统的示意图
对图像信号的采集:对图像信号的采集使用交换机来实现。交换机采集摄像头和无线路由器的信号,处理后送到平板电脑中。交换机采集信号的接线如图6所示。
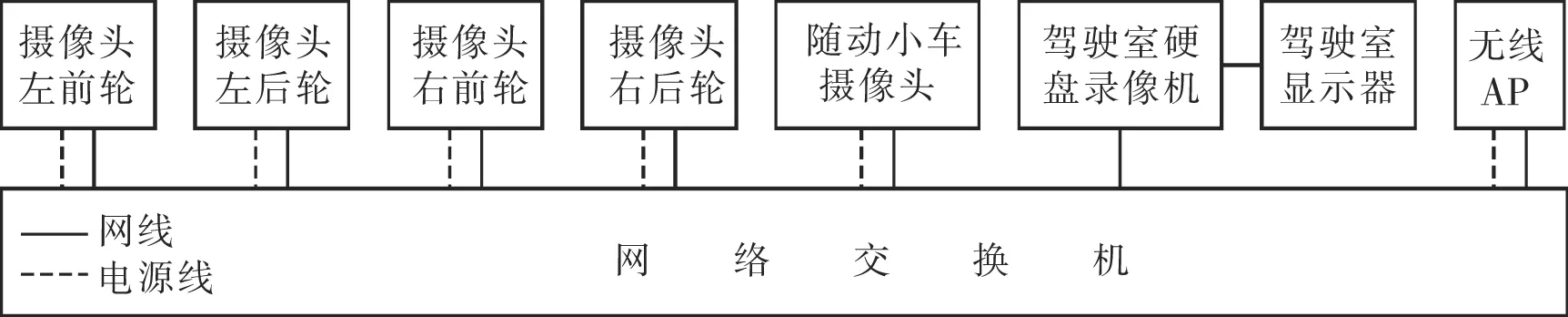
图6 交换机采集信号的接线图
2.3 微机控制系统
控制系统组成:①天车上安装数据信息采集柜;②箱面上安装12.1寸工业级平板电脑和电源开关、电源指示和运行报警灯;③安装一台欧姆龙PLC+20路扩展模块,配4路模拟量输入和2路模拟量输出,36路开关量输入,24路开关量输出;④采用220 V交流电源,保证平板电脑和PLC的使用;⑤现场安装5套摄像头(1动点、4定点),具体位置为4个大车承重行走轮各一个,小车视频监控一个,配齐摄像头的控制和信号传输系统(如数字网络硬盘录像机、二块3TB硬盘、千兆网络交换机等)。在平板电脑上能实时显示摄像头送来的图像;⑥将天车大小车、大小钩的运行信号、报警信号、限位信号等开关量信号接入PLC,使其在平板电脑上能显示、处理和储存这些信息;⑦在平板电脑上用VC编写上位机控制系统,将PLC送来的信号储存在数据库,能显示、处理和储存这些信息,也可根据计算结果进行预测和报警(如:接触器、继电器、开关等器件使用次数统计及寿命报警等);⑧通过编程实现天车的安全管理。如:实现天车自身状态信息识别,实现运动部分的自检;天车系统自身各控制信号、安防信号的运行记录;记录设备的实时运行轨迹(或时间参数)等功能;⑨天车大车、小车和吊钩的运行位置计算。通过在各相应传动部件上安装非接触式位置检测传感器,通过PLC把数据送到计算机进行位置计算;⑩通过PLC进行天车运动状态判别,在天车运行时控制声光报警器,对吊具下的人员进行安全警示。
控制系统功能:①平板电脑与PLC相连接,实时通信。把PLC采集到的数据进行处理后送到平板电脑中。在平板电脑安装有自主设计的监控软件,该监控软件用VC6编写。该监控软件把PLC送来的数据进行处理,再以图表,状态显示,操作事件列表的形式在监控软件上显示;②平板电脑与交换机相连接,交换机采集摄像头和无线路由器的信号,处理后送到平板电脑中。在平板电脑上按照大华监控软件,通过该软件实现图像的调用。
监控软件功能:该软件系统对天车的各个部件的运动轨迹位移进行累计,同时也对运行时间进行累积。软件上可设定大车、小车和吊具的轨迹累计报警和运行时间报警。所有采集到的数据以数据库形式保存,并可以通过存储设备进行备份。监控软件的软件系统结构图如图7所示。平板电脑在天车上电后自动启动,启动后监控软件自动运行,保证与天车工作的同步。监控软件接收遥控器发来指令的工作流程图如图8所示。
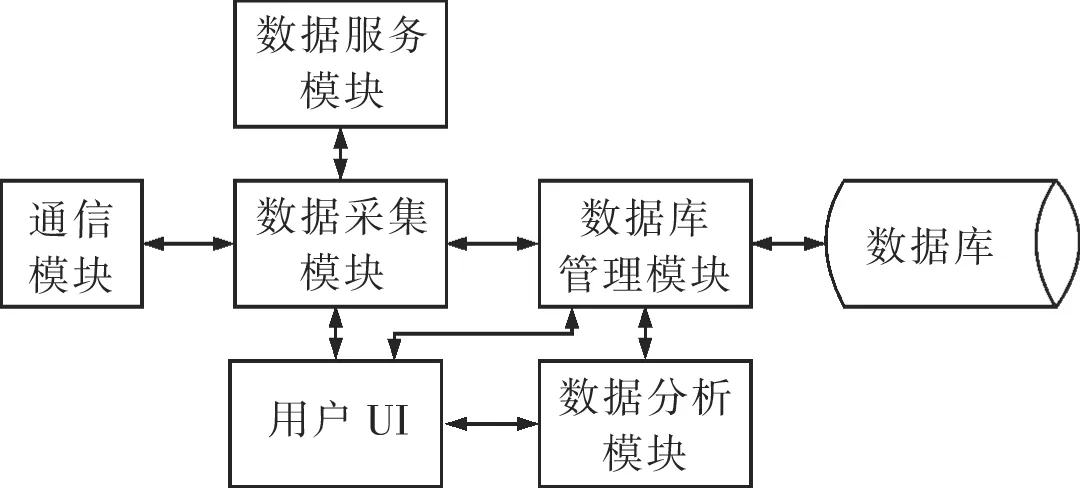
图7 监控软件的软件系统结构图
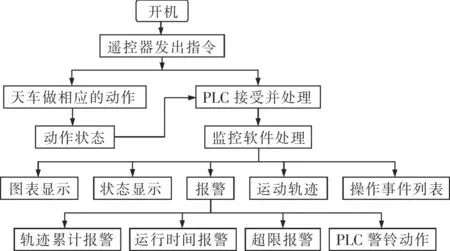
图8 监控软件的工作流程图
APP无线网络系统:监控摄像机只是一个独立的个体,要对这些设备做好统一管理,对同一个品牌的智能设备可通过一个APP进行管理。手机可通过无线连接上APP,在手机上可看到监控摄像机的图像。因此,采用TCP/IP下的无线网络来完成这项功能。无线AP网络把计算机监控数据和视频图像传输至移动终端APP上或指定网络中的计算机。计算机可通过相应的软件查看天车当时或之前的运行状态,也可实时通过终端上的APP功能观看。APP无线网络系统示意图如图9所示。

图9 APP无线网络系统示意图
3 结论
(1)在保留原有功能的前提下,增加激光限位器与无线遥控器,不但节约人工成本,还可提高生产效率,加强了安全性,改善了操作人员工作环境。天车上安装了微机安全、检测、控制系统,便于扩展天车信息识别、安全监测等功能,该系统扩展性强、操作简单、信息化程度高。
(2)通过APP功能,天车自身状态信息识别,天车系统自检,具备检查自身各控制信号、安防信号的作用。天车多向位置信息识别,能够识别天车及吊钩所在绝对位置;天车实时运行轨迹及累计,记录天车的运动状态、行程及累计轨迹时间;天车围界安全视频监控,天车状态信息无线传输、监控及APP,通过无线传输天车相关信息状态信号,可集中监控,可实时联接应用APP等功能。
猜你喜欢
快乐语文(2020年36期)2021-01-14
当代陕西(2019年23期)2020-01-06
智能制造(2019年9期)2019-03-23
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
意林(绘英语)(2018年1期)2018-04-28
新少年(2017年1期)2017-03-15
山东工业技术(2014年9期)2014-05-16
小火炬·阅读作文(2009年2期)2009-02-17
幼儿智力世界(2004年5期)2004-05-27
