基于迭代最近点算法的激光点云拼接研究
2020-01-09 04:58:44乔建委王建军许文硕卢云鹏胡燕威王志勇
山东理工大学学报(自然科学版) 2020年2期
乔建委,王建军,许文硕,卢云鹏,胡燕威,王志勇
(山东理工大学 机械工程学院,山东 淄博 255049)
传统的测绘采用手工测量方式,需投入大量人力物力,获得的测量结果误差也较大,不能满足现阶段人们的测绘需求。随着科技的不断进步,卫星遥感技术和全球定位系统在测绘中得到了广泛应用,实现了对各种数据信息的电子采集,测量精度也有了质的提高,但这些测绘技术获取的数据单一,只能表达二维信息特征,不能表现出直观的三维信息,极大影响了测绘技术的发展[1]。激光技术的进步,使激光雷达成为一种新的测绘设备,受到人们的广泛关注。
VLP-16激光雷达是Velodyne公司研制的最小型三维激光雷达,保留了电机转速可调节功能,其具有100 m的远程测量距离,每秒高达30万个点数据输出,±15°的垂直视场,360°水平视场扫描。在实际扫描过程中,由于扫描视场的限制和扫描环境遮挡等因素,往往很难仅由一站扫描获取所需的测量区域和建筑物的所有点云数据,一般需分多个站点进行扫描,再将扫描的多组三维点云数据进行拼接,进而得到完整的测量区域和建筑物的三维点云数据。
点云数据处理主要包括点云拼接、点云合并和点云降噪等。处理过程中,首先对各站点云进行拼接,站点间的拼接精度要达到0.05 m;其次是点云合并,相邻两站间有10%以上的重叠区,点云合并可以保证结构不变的情况下,有效地减少数据量;最后进行点云降噪,将与对象无关的点云进行删减剔除,提高点云质量[2]。
三维点云拼接技术一般分两步[3]:粗拼接和精准拼接。粗拼接大致将不同坐标系下点云对准到同一坐标下,常用的方法有转台法[4]、标签法[5]和曲面特征法[6]。外业扫描得到的点云数据在导入软件后,首先要进行数据拼接,即把多站扫描的点云数据转化到同一坐标系中,采用公共重叠区域的点云拼接,形成一个整体。在三维点云数据的自动配准中,运用最为广泛的是由Besl等提出的最近点迭代(ICP,Iterative Closest Point)算法[7]。但是ICP算法对2个点云的初值要求很高;否则,ICP的收敛方向是不确定的,增加了拼接的不可靠性。Masuda等[8]在点集中随机采样,用最小中值平方误差作为度量准则,该方法在每一次迭代后都需要进行重新采样。杨杰等[9]提取变化较大的点作为预参考点进行点云拼接,该方法只适用于角度差异较大模型。何文峰[10]提取重合区域中的平面特征,利用平面参数计算坐标系转换参数,但是这种方法需要平面特征完全重合。本文在保证其中一个站点点云坐标不变的情况下,首先采用手动提取同名点进行点云粗拼接,在此基础上再采用ICP算法进行点云精准拼接。此方法不需要在被测物体上附加任何标志物,在散乱点云特征较明显的情况下,可以获得良好的拼接效果。
本文以山东理工大学机械交通实验楼天井及其周边道路为研究对象,采用VLP-16激光雷达进行多站点三维扫描,并利用CloudCompare软件进行多站点的激光点云拼接、点云合并、点云降噪,从而获得完整的三维扫描点云。
1 激光点云拼接原理
1.1 不同站点激光点云的坐标转换
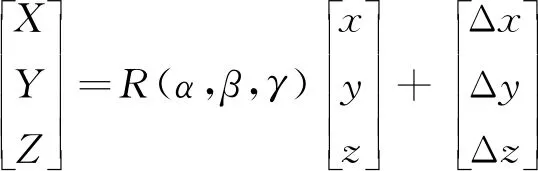
点云拼接是点云数据处理过程中的关键一步,本质上需经过坐标平移和旋转,把多个扫描站点云(xi,yi,zi)转换统一到同一坐标系(xT,yT,zT)中[11],需要3个旋转参数(α,β,γ)和 3 个平移参数(Δx,Δy,Δz)。以其中一个点云的坐标系为参考,根据两个点云之间的最少3个同名点,通过ICP迭代算法,可以将另一个点云通过旋转平移矩阵转换到参考坐标系,从而实现两个点云的坐标系统一和拼接。点云拼接的坐标转换关系式为
(1)
式中,
R(α,β,γ)=

点云拼接方法的种类较多,根据拼接时采用的不同基元,可以分为特征点拼接、无特征拼接两种[12]。其中,特征点拼接又分为靶球(靶标) 拼接、无目标的公共特征点拼接、混合拼接。无特征拼接常采用ICP迭代最近点算法,本文即采用该拼接方法。
1.2 点云粗拼接
很多研究人员设计了简单可行的拼接方法作为ICP算法的初值,如通过在点云重叠区设置人工标志达到识别并提取同名点[13-14]。拾取同名点可采用 CloudCompare软件的Registration 模块进行,分别在两个站点点云中选取至少3对同名点,通过换算点与点之间的相对位置关系,进行公共点匹配后完成两个测站之间的点云粗拼接工作。这种拼接方法的优点是在两个测站之间可以辨认的公共点均可作为点云拼接的连接点使用,不受标靶拼接方法的限制,在测站较少的情况下,点云拼接效率高,通过适当增加匹配的公共点个数,可提高两测站拼接的精度[15]。其缺点是,在海量点云情况下对公共特征点的选取困难。
1.3 点云精准拼接
ICP算法是最小二乘法迭代优化的过程,以此来求解两组点云数据最优拼接的刚性转换。其思路为:根据某种几何特性对数据进行匹配,并设这些匹配点为假想的对应点,然后根据这种对应关系求解运动参数;再利用这些运动参数对数据进行变换[6]。利用同一几何特征,确定新的对应关系,重复上述过程进行迭代,使得数据中的重叠部分充分吻合。ICP方法中使用的几何特性即点在空间中的距离[16]。具体的算法描述如下:
①在两组点云P和P′中,将P作为目标点云,P′作为参考点云。将P的中心平移至与P′的中心重合,将平移向量记为t0。
②对点云P上的每一点,搜索在点云P′中的空间最近点,建立对应关系。定义误差函数如式(2)所示,即找到使最近点之间的距离均方差最小的旋转矩阵R。
(2)
③令Pn=Rn-1·Pn-1,(第n次迭代,n≥2),即将点云P按照式(2)中的最优解旋转。分析两片点云对应点之间的协方差矩阵,将协方差矩阵转化为对角矩阵时所产生的初等变换矩阵,即为所求的旋转矩阵R,可以使用奇异值分解法进行求解。
④重复迭代②③,直至误差E(R)小于设定值时迭代终止。此时的P与点云P′位于同一坐标系,它们的全集即为拼接结果。坐标变换参数R,t的计算如下:
(3)
经典ICP算法可以达到很高的拼接精度,但是它每一次迭代都需要蛮力地在全体点云中搜索最近点(步骤②),这种搜索过程会耗费大量的时间[17]。
2 实验过程
2.1 实验数据采集
本实验以山东理工大学机械交通实验楼的天井及其周边道路为研究对象,采用Velodyne激光雷达VLP-16进行三维扫描,首先扫描天井区域,然后对天井外侧道路进行扫描,两组点云经转换并保存数据为txt格式。
CloudCompare是一款基于GPL(General Public License)开源协议的3D点云处理软件,将不同站点采集的两组点云数据导入其中,结果如图1所示。图1中,天井点云为绿色,外侧道路点云为黄色。

图1 激光雷达扫描的两组点云Fig.1 Two sets of point clouds scanned by Lidar
被测区域的卫星俯视图如图2所示。图2中,绿色框内是天井区域,黄色是外部道路区域,红色部分是公共走廊区域。由图2可以看出,图1中所获得的两个点云都扫到了红色的公共区域。

图2 被测区域的卫星俯视图Fig.2 Satellite map of down-view for the survey area
2.2 点云去噪
激光雷达在扫描物体的过程中是360°全方位、无死角的扫描,因此在扫描距离内,所有的数据都会被记录并保存下来,这就为之后的数据处理增加了难度,在进行点云数据拼接之前要对其做前期的去噪处理,把与所需建筑物测绘无关的点云去除掉。为便于拼接,减小后续拼接算法运算量,只留下两站点点云公共部分(天井和外侧道路连接之处)进行拼接,结果如图3所示。

图3 公共部分点云(剪切以后)Fig.3 Point clouds(after shearing) of common part
由图3可以看出,降噪和去除多余杂点以后,可以直观地看到公共部分点云分布情况,方便之后的点云拼接。
2.3 点云粗拼接
对点云进行粗拼接时,采用拾取同名点的方法,手动选取两组点云中可以辨识的公共特征点,在天井点云中选择B0、B1、B2为参考点,在外侧道路点云中选择A0、A1、A2为其同名点,至少选取3对同名点后再进行拼接。同名点的选取直接影响配准结果,因此效果较差时需要删除误差较大的点。拼接之后会生成一个4×4的矩阵,形式如下:
选择的参考点、对齐点坐标见表1。
选择参考点和对齐点之后进行粗拼接。均方误差(RMS)是一种常用的评价拼接精度的方式,粗拼接之后生成的最终RMS为0.046 205,坐标旋转平移矩阵参数为
表1 参考点、对齐点坐标
Tab.1 Reference points and alignment points coordinates
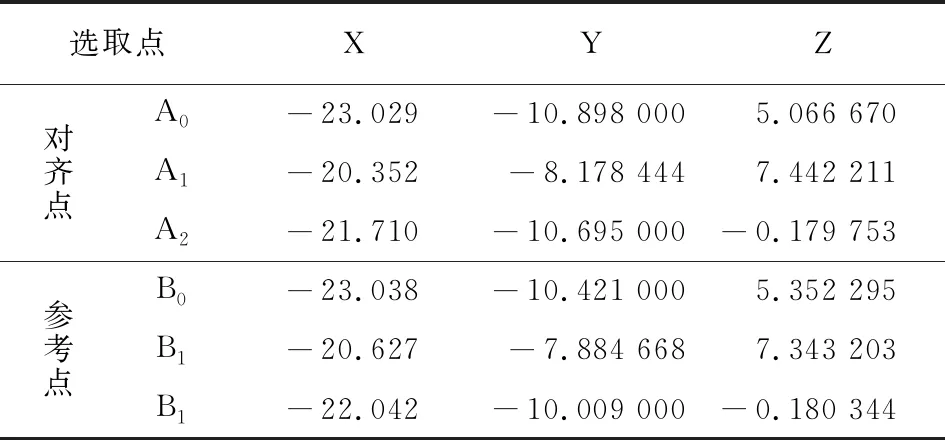
选取点X Y Z对齐点A0-23.029-10.898 0005.066 670A1-20.352 -8.178 4447.442 211A2-21.710-10.695 000-0.179 753参考点B0-23.038 -10.421 0005.352 295B1-20.627-7.884 6687.343 203B1-22.042-10.009 000-0.180 344

2.4 点云精准拼接
把点云粗拼接得到的结果作为ICP算法的初值进行点云的精准拼接,在两组点云中选取7对公共点,仍以天井点云为基准,计算外侧道路点到对应参考点的距离,精准拼接生成的最终RMS为0.006 025,坐标旋转平移矩阵参数为

粗拼接和精准拼接之后对齐点到参考点距离变化情况见表2。经过粗、精拼接之后的点云如图4所示。
表2 粗拼接与精准拼接的距离变化比较
Tab.2 Comparison of distance change between rough and fine mosaics

点号粗拼接距离变化/m精准拼接距离变化/mΔXΔYΔZΔXΔYΔZ1-0.026 5070.048 6190.021 1400.016 4600.008 3100.018 34620.017 9320.046 2380.023 4500.029 4060.013 4600.003 49430.095 4250.013 1200.048 4560.063 5070.035 3860.024 88840.093 2620.003 8320.054 7760.062 9960.087 2330.023 15250.042 1380.055 6720.007 3560.029 3660.068 9960.038 42260.032 9490.077 1500.027 3000.079 3210.011 7920.015 27670.054 912-0.069 553-0.008 4740.053 5330.015 0960.001 072
图4 拼接之后的点云Fig.4 Point clouds after splicing
2.5 精度分析
计算可知,选取的控制点的拼接精度均小于10 cm,拼接误差较低,点云拼接效果较优。精准拼接之后的距离显示,拼接之后的精度达到了4 mm,较粗拼接的精度更优。通过表2平移参数的对比发现,7个点号相较于基准点的距离,精准拼接明显比粗拼接的距离要小,2号点和7号点的ΔZ达到了3 mm和1 mm,可以看出拼接精度进一步提高。
3 结束语
采用激光雷达在两个站点进行了激光扫描,获得了两组激光雷达点云。采用CloudCompare软件进行了手动拾取同名点的点云粗拼接,并进一步采用ICP算法进行了点云的精准拼接。通过手动拾取同名点进行粗拼接的方法,可以完整进行点云的拼接工作,在同名点明显的情况下,效果较好,然而操作过程繁琐,而且手动选择同名点,难免会产生误差,同时随着误差的积累,会影响最终拼接的效果。但是在粗拼接的基础上,利用ICP算法可以使点云拼接的精度大大提高,拼接效果更好。
猜你喜欢
现代装饰(2021年6期)2021-12-31 05:28:00
西江月(2021年3期)2021-12-21 06:34:14
金属加工(冷加工)(2020年11期)2020-11-24 08:58:20
现代装饰(2019年7期)2019-07-25 07:41:40
测控技术(2018年5期)2018-12-09 09:04:24
诗潮(2018年1期)2018-04-25 01:48:20
精密制造与自动化(2018年1期)2018-04-12 07:42:50
连环画报(2016年10期)2016-12-16 05:13:34
设备管理与维修(2016年5期)2016-03-16 02:20:46
小主人报(2016年4期)2016-02-28 20:49:05