
计算机导航技术在复合性眼眶骨折整复术中的应用
2020-01-08 03:13禹政钰富建明
国际眼科杂志 2020年1期
刘 炯,禹政钰,杨 光,富建明,王 京
0 引言
复合性眼眶骨折是指不仅眼眶眶壁发生骨折,而且眼眶眶缘也出现骨折[1],常表现为额-眶骨折、鼻-眶-筛骨折、颧-眶-上颌骨骨折及全眶复合性骨折(同时发生前面描述两型以上的骨折)等,是颅颌面骨折的一部分。骨折不仅累及眼眶四壁,产生眼球内陷和严重的视功能障碍,而且造成眼眶周围临近骨的塌陷及错位,导致严重的面中部畸形。复合性眼眶骨折手术难度大、时间长,常涉及颌面外科、口腔科、耳鼻喉科、脑外科等相关学科,其畸形整复是临床上的难点[2-3]。近年来,计算机导航辅助手术技术(computer navigation assisted surgery)迅速发展,广泛应用于脊柱外科、关节置换、肿瘤治疗、神经外科、颌面外科、耳鼻喉科等领域,使手术安全性及精确性得以大幅提高,我们也尝试将其引入辅助复合性眼眶骨折整复手术中,获得了一些经验。
1 对象和方法
1.1对象回顾性分析我院2014-01/2018-03收治的复合性眼眶骨折患者19例19眼,其中颧-眶-上颌骨复合骨折9眼,鼻-眶-筛骨折6眼,额-眶骨折2眼,全眶骨折2眼;男14例14眼,女5例5眼;年龄17~49(平均29.73±4.51)岁。所有患者均在计算机导航系统辅助下行眼眶骨折整复及眶内填充物植入术。
术前所有患者均有眼球内陷,其中患眼眼球突出度较健眼低2~3mm者9眼,低4~5mm者8眼,低6mm及以上者2眼。术前10眼存在眼球运动障碍,其中Ⅰ级6眼,Ⅱ级3眼;Ⅲ级1眼(判别标准[4]:0级:眼球运动完全不受限;Ⅰ级:眼球向一个或多个方向极限运动时受限;Ⅱ级:眼球不固定,向一个或多个方向移动时明显受限;Ⅲ级:眼球固定)。术前有13眼存在不同程度复视,其中Ⅰ级5眼,Ⅱ级6眼;Ⅲ级2眼[判别标准[4]:0级:无复视;Ⅰ级:周边视野复视(>15°);Ⅱ级:正前方及阅读位(<15°)无复视,其余方向复视;Ⅲ级:正前方及阅读位(<15°)复视]。术前4眼存在眶下神经支配区感觉障碍,表现为伤侧下睑、面颊、上唇皮肤及牙龈黏膜感觉迟钝或减退。所有患者均签署知情同意书,经医院伦理委员会审批通过。
1.2方法本研究中采用红外线被动诱导计算机导航系统(Vector Vision Cranial/ENT 系统)及iPlan Cranial/ENT导航软件进行辅助手术设计及辅助导航手术操作。
术前1d采集患者眼眶CT影像资料(水平位及冠状位),层厚2mm,输入导航系统,以健眼为标志,利用镜面原理对患眼进行三维重建,构建患者眼眶及周边颌面结构的三维立体重建模型,在此模型上进行术前设计,熟悉骨折形态及相邻组织解剖关系,标注重要解剖结构位置及深度,确定手术入路、预定骨折块移动复位的方向及固定位置,预设眶内填充物植入位置及深度,避免伤及重要神经血管,预计恢复眼球突出度程度,进行手术演练,最终确定手术方案,并将上述设计及图像保存于导航系统内(图1)。
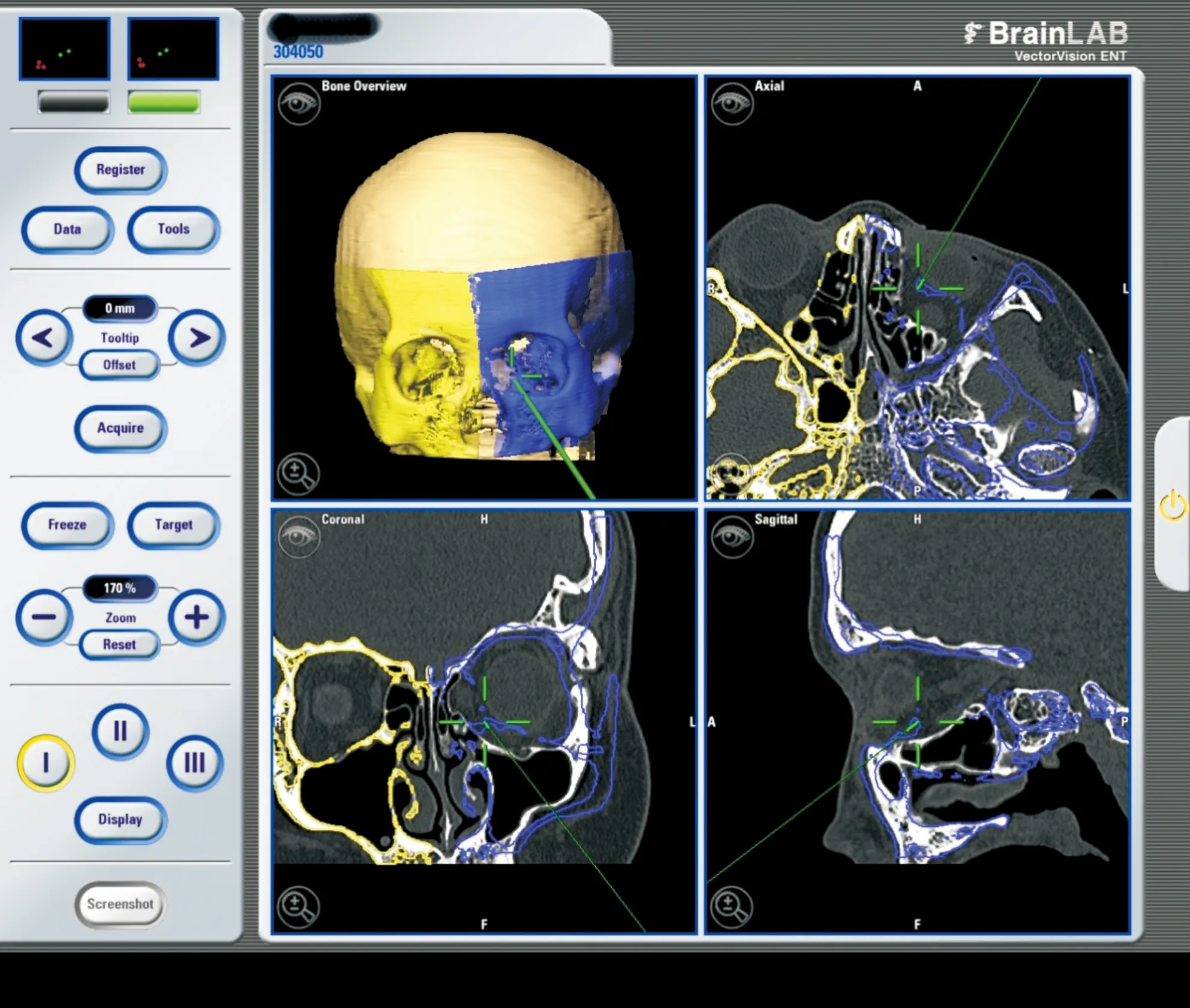
图1 术前导航设计,以健眼为标志,利用镜面原理对患眼进行图像的三维重建,医生在导航系统上进行术前设计,确定手术入路,预计植入填充物位置及深度,确定手术方案。
术中先进行患者示踪器、手术工具、眼眶及眶周解剖标志参考点注册及配准(指将患者的实际解剖结构与虚拟三维影像融合的过程)。患者头面部消毒铺单,将导航用颅顶参考架(患者示踪器)以颅骨钉牢固固定于颅顶,导航系统捕获并识别其发射的信号,将其作为基准参考点,进行注册及配准,建立计算机虚拟图像和患者实际解剖结构两个系统之间的联系。随后,注册手术工具及手术探针(注册后可被导航系统识别并显示在虚拟图像上,从而进行实时导航手术操作)。使用导航探针在患者颜面、眼眶周围进行多个解剖参考点注册,导航仪接收到各参考点的位置数据并与术前患者的影像数据融合对照,进行点匹配和面匹配,将患者的实时眼眶解剖结构与术前的三维模型叠加整合。导航系统自动测算误差范围,若误差可接受,则患者解剖结构与虚拟模型融合匹配成功,二者的实时关联得以建立,可开始进行导航手术操作(图2)。

图2 A:安装导航用颅顶参考架(患者示踪器),颅骨钉固定,进行患者注册及配准;B:患者注册及配准,导航系统自动匹配并计算误差。
所有手术均与我院口腔科合作完成,按术前导航设计,先修复颌面骨折,复位眶缘。术中充分暴露骨折部位,复位疝出的眶内软组织,暴露骨折断端,在导航系统引导下,移动骨折块至术前设计的预定位置,以钛钉钛板牢固固定;对眶缘破碎缺损过大者,使用羟基磷灰石复合多孔聚乙烯人造骨板修复眶缘。颌面骨折复位、固定完成后,若患者骨折块位置移动较大,则于手术台上重新摄片,获取患者当前影像资料,输入导航系统,修正手术设计,再在导航系统引导下植入羟基磷灰石骨板,使用导航系统实时监测填充物植入的位置及深度,避免压迫损伤视神经及重要血管,并使用导航系统监测术眼眼球突出度,使其较健眼突出2mm左右[5]。复位满意后,拆除导航用颅顶参考架,分层关闭手术切口,加压包扎。术后静脉滴注抗生素和糖皮质激素3~5d(图3)。

图3 A,B:术中在导航系统引导下,实时监测植入填充物的位置及深度;C:术中使用导航系统监测术眼眼球突出度,使其高度高于健侧眼2mm左右。
2 结果
导航系统使用情况:术前利用导航系统进行手术方案设计及手术演练平均用时30min。术中安装颅顶参考架、注册导航系统、配准及术中实时导航操作等用时30~45(平均35.26±6.12)min。导航系统平均注册误差小于1mm(系统自动计算)。所有手术均在导航系统辅助下顺利完成,骨折块均按术前设计复位,并牢固固定,眶内填充物植入位置及深度符合术前设计,未出现压迫视神经及眶内重要血管、组织等并发症。导航系统使用顺畅,没有出现影响手术操作及增加手术难度的情况。
术后随访6~18(平均10.82±3.47)mo,所有患者术后CT均显示骨折复位满意,固定牢固,眶内填充物位置及深度与术前设计相符,精确度符合术前设计。所有患者中,14眼眼球内陷完全矫正,5眼残存眼球内陷(其中4眼残存眼球内陷1mm,1眼残存内陷3mm)。术前存在眼球运动障碍的10眼中,术后7眼恢复正常,3眼好转(其中2眼残存Ⅰ级运动障碍,1眼残存Ⅱ级运动障碍)。术前有13眼存在不同程度复视,术后10眼完全矫正,2眼改善,1眼无明显变化。术前存在眶下神经支配区感觉障碍的4眼,经给以神经营养药物治疗后,均于术后1~6mo内恢复;未出现因手术导致的医源性眶下神经支配区感觉障碍病例。所有患者均未出现术后视力明显下降或视力丧失、眶内出血等严重并发症。
3 讨论
复合性眼眶骨折除眶壁发生骨折导致眼球内陷和复视外,还有眶缘的骨折移位及眶周骨块的畸形,其治疗首先要复位移动的眶周骨块,重建完整的眶缘,然后修复眶壁,恢复眼眶的解剖外形和正常容积,再还纳疝出的眶内容物,恢复眼球位置,治疗的关键在于精确重建眶壁以及正确植入眶内填充物。整复手术难度大、时间长,常涉及颌面外科、口腔科、耳鼻喉科、脑外科等相关学科。同时,由于成人眼眶是一个近似锥形的狭小骨腔,其内容纳众多重要组织,包括眼球、眼外肌、密集分布的血管神经、软组织、筋膜等,腔隙狭小、功能重要。眼眶骨折整复术中术野暴露困难,手术器械使用空间受限,术中眼眶填充材料植入的位置及深度难于估计,容易损伤眶内重要血管导致眼眶内出血、眶压升高,直接或间接损伤视神经导致视力丧失,损伤或夹持眼外肌导致复视矫正不理想或术后复视加重以及眶内填充物植入位置、容积不当导致眼球内陷、眼位矫正不理想等严重并发症。
如何改进手术方法,减少并发症,提高手术安全性,是目前急需解决的问题。如果能在术中扩大术者可视范围,使手术器械能在狭小的空间中灵活应用,引导指示填充物植入位置深度,避开重要组织结构,同时提前预计填充物所增加的眶容积,并于术中实时监测手术进程及眼球突出度改变等,将能大幅度降低手术难度,增加手术安全有效性。而计算机导航辅助手术恰好可以达到此目的。计算机导航技术的基本原理与全球卫星定位系统(GPS)类似:首先需要确定一个或多个位置固定的参考点,然后获取观察目标与上述参考点之间的方向及距离的相对关系,通过计算整合,确定观察目标相对于各个参考点在三维空间中的实际位置及运动轨迹,从而实时追踪其运动状态,引导手术,达到导航的目的。导航系统可通过虚拟现实技术,将患者真实解剖结构与虚拟影像模型结合起来,术前可进行设计演练,术中可使原本狭小的手术空间及复杂的解剖结构清晰显现,实时引导手术,提高手术的精确度及安全性[6-13]。近年来,计算机导航技术在辅助骨科手术方面发展迅速,国内外也已逐渐开展将其应用于眼眶骨折手术的研究,并获得了良好的疗效[6-17]。
我们的研究表明,在复合性眼眶骨折整复术中,使用计算机导航辅助手术具有如下优点:(1)由于眼眶是一个近似锥形的骨腔,周围的颌面骨均为坚硬骨质,颜面部软组织相对较少且菲薄,可移动度小,所以眶周及眶内组织结构容易被CT、MRI等医学影像设备清晰准确地反映,易于三维重建;同时,眼眶及眶周骨组织有多个明确的解剖标志可作为导航定位标记引导导航操作;眼眶及眶周的骨组织结构坚实,不会因手术操作而发生形变;术中固定骨折块的钛钉、钛板以及眶内填充物的位置、深度亦可通过眼眶骨骼标志和医学影像准确显现。这些特点均有利于计算机导航系统准确显像及精准导航引导手术。(2)术前可利用导航系统建立患者颜面及眼眶三维模型,各方位立体地显示复合性眼眶骨折的形态、骨折块的位置及与周围组织的相对关系,标记重要的血管神经。术者可在导航工作站上使用三维重建模型熟悉患者的创伤特点,设计手术入路,拖动骨折块复位、确定其固定位置、计算眶内填充物的形状体积、预设填充物植入位置及深度、避免损伤重要神经血管,做出手术方案,进行手术演练。(3)手术中可通过导航定位跟踪系统,将患者实际解剖结构与三维模型匹配融合,在屏幕上多画面、多角度实时显示患者解剖结构关系、病变部位以及重要的血管神经,扩大术野,使原本直视手术中难以暴露的手术部位清晰显现;并实时显示注册后的手术器械及眶内填充物进入的方位、深度、移动轨迹;同时显示术前设计方案,实时对比,引导手术操作,可有效避免损伤眶内重要的血管神经,并引导填充物准确定位,提高手术精度,增加手术安全性。术中亦可实时监测眼球突出度,使眼球内陷的矫正更加理想。
研究中,我们也发现计算机导航辅助手术仍存在一些问题:(1)术中导航系统的安装、注册配准过程需耗费一定的时间,导致手术时间延长;随着术者手术经验的提高,此过程可明显缩短。(2)导航系统的准确度问题[18-20]:由于导航技术相对不完善性,导航系统本身存在的误差、定位的精确性、软组织变形、可移动结构导航的实时性等都是导航手术中需要关注的问题。其中,定位精确性可通过选择更适当的配准方法及配准标志点以及导航系统信号采集处理技术不断提高而改善。但是,组织形变是一个必须考虑的限制导航手术应用的重要问题:软组织由于比较容易被压缩或发生水肿或较易移动,而导致术前获得的图像信息并不总能准确表现术中的组织形态(即结构图像漂移),因此,导航的准确性在软组织术中有所降低。但好在眶周及眶内软组织相对较少,可压缩性不大,眶腔内空间有限,软组织可移动度小,所以我们体会可通过手术前1d摄片,减少组织水肿变化造成的影响,并且提高影像资料的质量,获得更高清晰度、更准确的影像,同时术中操作尽量轻柔准确,减少术中软组织损伤及移动所导致的结构图像漂移。对于骨性组织,由于复合性眼眶骨折手术中颌面骨折复位及眶缘重建完成后,患者的骨性结构位置会与术前不同,也会导致结构图像漂移,这就需要在术前设计时多方位、多角度准确设计骨块移动的方向位置,标记多个解剖标志点,做好手术演练;术中随时对比设计方案,移动复位骨块时实时监测解剖标志点的移动情况,使之与术前设计重合,完成准确复位。也可在眶缘重建完成、骨折断端固定满意后,行台上摄片,再将实时影像学资料输入导航系统,与原手术设计方案进行对比分析,修正后再进行实时导航操作。目前,国外亦有研究报道[21-23],可于术中行实时CT,并以此为基础进行实时导航,获得良好效果。通过上述措施,可将导航误差减至最低,手术安全精确。另外MRI可良好显示软组织形态,在实时导航中甚至可能解决结构图像漂移的问题,近年来,有学者在现有手术导航系统基础上发展出一种基于CT或MRI数据的三维增强现实系统,精确度极高,运用裸眼立体成像技术,实现虚拟数据与现实场景的高度融合,极大地提高了手术精度与效率,有着较大的发展空间[24-25]。
总之,我们的使用经验表明将计算机导航技术应用于复合性眼眶骨折整复术,可实现术前手术设计演练,术中动态跟踪、实时导航,可以显著提高手术的精确性与安全性,降低手术并发症,术后效果满意。
猜你喜欢
实用皮肤病学杂志(2021年3期)2021-12-04
家庭科学·新健康(2017年7期)2017-07-14
商周刊(2017年12期)2017-06-22
养生大世界(2016年6期)2016-06-14
中国医疗美容(2015年2期)2015-07-19
中国医疗美容(2015年1期)2015-07-12
恋爱婚姻家庭·养生版(2013年9期)2013-05-14
环球时报(2010-01-26)2010-01-26
组织工程与重建外科杂志(2009年6期)2009-12-30

- 国际眼科杂志的其它文章
- Effect of GSH and niacin combination on protein oxidation,ER stress,glycation and aggregation in HLE cells under high glucose condition
- Evaluation of cerebral visual functions in low myopic adolescents
- 模拟失重对成年小鼠闪光视网膜电图和视网膜微循环的影响
- LV-EGFP标记兔角膜基质细胞体外基质层移植的实验观察
- 沉默SIAH1基因对H2O2诱导的人晶状体上皮细胞凋亡的影响
- 杞菊地黄丸治疗干眼症有效性及安全性的Meta分析