
油液磨粒传感器综合测试平台的设计研究
2020-01-08 02:06王文瑾
测控技术 2019年12期
王文瑾,马 静
(1.航空工业北京长城航空测控技术研究所,北京 101111; 2.状态监测特种传感技术航空科技重点实验室,北京 101111)
磨损是摩擦副机械零件的高发失效形式之一,研究结果[1]表明:因齿轮、轴承异常磨损造成的航空发动机提前换发在全部故障中占比超过60%。滑油中磨损颗粒的特征参数中包含磨损程度、发生部位等运行状态信息,对此进行分析可做出设备的故障风险预警,因此复杂机械系统的油液在线监测和相应磨粒传感器技术引起了广泛关注[2]。
目前正在研究和开发的在线磨粒监测传感器主要类型包括[3-4]:电磁型、导电型、电容型、光电型、超声波型等。受灵敏度、精度、速度和环境适应性等诸多技术局限,多数传感器还处于研究阶段,真正能投入现场使用的工业化产品很少。比较而言,以电磁感应变化测量为基础的磨粒传感器结构简洁、响应速度快、灵敏度高,具有较大的应用潜力。在该类磨粒传感器产品中,技术先进成熟、应用广泛的典型产品有加拿大GasTOPS公司开发的MetalSCAN系列金属颗粒传感器、美国MACOM Technologies公司的 TechAlertTM10和英国Kittiwake公司的FG型在线磨粒传感器[5],其中MetalSCAN传感器已成功应用于美军飞机。相比之下,国内磨粒传感器无论在性能还是应用水平上都还存在较大差距。
测试技术是改善与提高传感器性能水平的基础,资料进一步显示[6],目前国内主要采用油液颗粒试验台和干式无油试验装置两种测试手段,并无统一的测试标准。油液试验台通过手动或自动方式在循环油路中加入制备的颗粒物并使其随油液流动进入被试传感器进行测试。虽然油液试验台的工况与实际应用较为接近,但试验台操作维护较为复杂,且环境因素和二相流特性变化会给测试统计结果带来不利影响。干式试验一般采用柔性线带作为颗粒载体,即将制备的颗粒物固定在线带上,拖拽线带使其在被试传感器流道内运动。尽管通油对比试验显示介质对磨感电势的测量并无影响,但拖拽运动较难精确控制,因此难以保证测试结果的一致性,应用也因此受到限制。为了深入研究磨粒传感器的诸如速度-粒度关系、颗粒混叠、振动耦合等多因素效应和相应弱信号提取、虚警抑制等技术,需要探索新的测试途径和研究开发相应的试验设备。
1 测试平台的构成和要求
1.1 需求分析
文献[7]给出了某航空发动机滑油监测的一般需求:检出的颗粒粒度在250~900 μm,颗粒最大长径比为1∶7,检出量总数为105量级,油液流量为0.5~50 L/min,温度范围为-55~190 ℃,短时可达240 ℃;环境振动为0.01g~2.5g。
待测磨粒传感器是一类航空发动机金属磨粒在线监测用的三线圈结构电磁感应型传感器,具有颗粒统计分析、磨损预测和寿命预警功能。传感器流道管径为20 mm,流道结构长度不大于200 mm,要求铁磁性材质颗粒物当量直径的检出能力优于155 μm,非铁磁性颗粒物优于650 μm,工作温度为-55~+200 ℃,最大压力为0.5 MPa。
磨粒传感器的性能参数测试要求制备颗粒物组合受控在振动环境下的待测传感器探测区域运动,触发待测传感器的探测机制,颗粒物的高速运动需要精确控制并与传感器所处的模拟环境振动相融合。
1.2 构成原理
测试平台的系统架构主要由电磁振动台系统、直线运动平台及相应的测控柜和功放柜等组成,如图1所示。待测磨粒传感器和卡具固定在振动台上,随工作台面做垂直方向的环境模拟振动;标准颗粒物组合分布固定在探测杆内,探测杆由直线机构驱动沿水平方向运动穿过待测传感器液池的探测区间;探测杆被结构支撑,使其运动中保持与待测传感器的位姿关系且能避免机构间的运动干涉,从而实现模拟流体中颗粒物运动。

图1 测试平台系统组成架构
1.3 主要技术参数
(1) 直线运动。
参照需求,直线运动匀速段可控速度范围设定为0.5~5 m/s,并尽可能扩展速率上限以满足潜在的测试需要,匀速段速率控制精度优于1%,探测区位置的匀速段行程不小于200 mm,加速度能力不小于40 m/s2,运动行程的直线度优于0.2 mm。
直线运动控制包括点位、梯形速率轨迹、往复速率轨迹模式,运动速度可连续调整,并具有自动回位、起点选择和运动轨迹参数设置功能。
平台机构的组合尺寸须最小化以适应场地和安全要求,机构的位姿可调整并能防止探测杆、振动台、传感器负载间出现运动干涉损伤。
(2) 振动模拟。
参照实际环境振动谱要求和产品型谱,振动台的最大振动加速度设定为不小于10g,频率范围为2~3000 Hz,振动台最大随机推力不小于300 kgf,承载能力不低于100 kg,振动参数可远程设置,具有远程启动/停止控制功能。
2 测试平台的要素分析与实现
2.1 直线运动控制
基于整体结构尺寸和高速、高动态运动控制的要求,测试平台的直线运动采用高速滑动导向、直线电机驱动、光栅尺位移测量、数字式位置闭环伺服控制方式。直线电机与定向导轨经组合安装在石基底座上,双层结构和微调机构实现底座的全方位姿态调整。4个电感式接近传感器提供机械零位和限位标记,柔性导线及拖链适应高动态需要。
导向机构选用igus公司的模块化滑动导轨,最高理论速度为15 m/s,最大加速度能力为600 m/s2;两根平行导轨各配两个滑块组成定向滑板机构,滑板上固定电机动子、光栅和探测杆接头部件。设计校验结果表明:5 kg负载下,滑板机构以180 m/s2加速度的运行情况良好,长期运行速度为5 m/s,质心变化量不大于0.2 mm。
直线电机选用ACCEL公司无铁芯分装结构的系列产品,峰值推力为1300 N,连续推力为325 N;三段定子拼接组合后总长度为1260 mm,动子板长度为199 mm,质量为2.2 kg,标称反电势系数为26 V/m/s,推力系数为78 N/A。
电机驱动器选用CopleyControl公司的数字式伺服驱动器,峰值输出电流36 A,最大供电电压240 V/3相,内部数字伺服算法,最大3 kHz位置更新频率。
光栅尺选用REINISHAW公司RGS20-S系列反射式增量编码光栅尺和数字读数头,标称线性精度为±3 μm/m,测量分辨率为5 μm,最高理论测量速度为12 m/s。
运动伺服采用速率前馈复合控制方式。伺服驱动器对接入的光栅位置增量脉冲进行编码并解算形成数字反馈参量,实现位置伺服三闭环反馈控制。运动行程是决定测试平台整体空间尺寸和最大速度实现的重要参数。导轨全行程长度应满足:Lg≥Ls+Lb,其中:Ls为机构动子板运动行程;Lb为动子板在运动方向的长度,这里是200 mm。梯形速率轨迹运动行程计算公式为
(1)
式中,Vcm为匀速段速度(m/s);A为运动过程的控制加/减速度(m/s2)。图2显示了匀速段速度分别为5 m/s、7 m/s和10 m/s时加速度与运动行程的关系。

图2 行程与加速度关系
经计算:在5 m/s和10 m/s匀速段,当加速度为42 m/s2和180 m/s2时的运动行程加上动子板长度小于1 m,可满足导轨全行程范围要求。同时计算得到180 m/s2加速度时的动子板机构需要的电机峰值驱动推力为1046 N,所选电机可以满足要求。
测试平台的主控计算机配置串、并行和网络接口与伺服驱动器、振动控制仪通信连接。控制计算机软件利用Microsoft VC6.0平台开发,交互式软件控制界面提供对直线运动单元的参数设置、状态显示和所有操作管理。基于Copley Motion Objects(CMO)软件实现运动控制功能的开发。
2.2 振动环境模拟
根据要求,选择随机推力为300 kgf的振动台系统。其主要参数为:频率范围2~4000 Hz,最大速度2 m/s,位移范围25.4 mm,动圈质量3 kg,最大载荷120 kg,传感器卡具及载物杆支撑与台面配套定制。8通道振控仪具有135 dB动态范围,80 kHz分析带宽,采用2个ICP加速度计实现振动测量和控制。图3给出了振动试验的振动谱要求,两个窄带随机振动谱的基频分别为f01=17.4 Hz和f02=57 Hz。

图3 振动环境要求
经分析计算,振动台总载荷为10 kg,与随机振动总均方根加速度相对应的随机推力分别为87.4 kgf和107.2 kgf,按式(2)估算的随机振动最大位移分别为15.9 mm和2.68 mm,能够满足要求并为探测杆接头设计提供了设计依据。
(2)
式中,f0为下限频率(Hz);W0为下限频率处的PSD(g2/Hz)。
2.3 粒物和探测杆组装结构
探测杆选择低摩擦自润滑材的杆料Iglidur J加工制作,两根拼接至长度1960 mm,直径通过成形磨工艺加工至φ9.4-0.1mm。材料的使用温度为-55~+90 ℃,弹性模量为2400 MPa,抗拉/压强度为73/60 MPa,体电阻为1013Ω/cm3,密度为1.49 g/cm3,轻载荷下磨损速率优于0.5 μm/km,材料表面直线速度限制为8 m/s。探测杆具有足够的强度和刚度,可以避免结构失稳,三维建模和实践还表明,探测杆的柔性关节接头结构可以适应水平直线运动和垂直振动耦合关系的需要,有效防止运动干涉。探测杆测试端按两个正交方向50 mm间隔交错分布加工各8个M2×7 mm螺孔,双方向共16个间距25 mm的螺孔可按测试需要利用护套将金属颗粒固定在杆内不同位置,如图4所示。
3 测试平台性能试验
为了验证测试平台的设计效果和评价性能,现场条件下对测试平台的主要技术参数进行了测试,测试项目包括:速率范围、匀速段速率精度、匀速段行程、运动直线度、回零(回位)精度,测试结果如表1~表4所示。
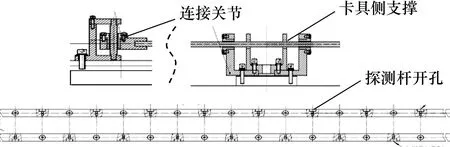
图4 探测杆连接结构

表1 速率控制性能测试结果

表2 加速能力测试结果

表3 回位重复性精度测试结果

表4 运动直线性测试结果
4 传感器测试验证
为了模拟发动机滑油中颗粒存在的状态,试验中采用了单颗粒通过传感器和组合颗粒通过传感器的多种测试方案。试验前,对探测杆进行了彻底的清理,经过反复清理、测量,确保测试前的探测杆中不含有金属碎屑残留,以免影响试验的正确性。
4.1 单颗粒测试
在探测杆的螺孔内分别安装不同尺寸、不同性质的金属颗粒,以固定的速度运动,验证磨粒传感器是否能准确测量出穿过传感器敏感区的动态金属颗粒的尺寸和性质。试验中分别使用350 μm铁磁性、500 μm铁磁性、800 μm铁磁性、800 μm非铁磁性、900 μm非铁磁性颗粒进行测试,测试结果为磨粒传感器检出率为90%以上。
4.2 单颗粒速度特性测试
传感器输出的波形如图5所示,波形的周期、频率、幅值与颗粒尺寸、运动速度成比例对应关系。

图5 传感器输出的波形
单颗粒运动速度与传感器微弱信号提取速度具有很大的关系,与传感器微处理器采样速率的关系如式(3)~式(5)所示。
(3)
(4)
f采>20f
(5)
式中,T为产生波形的周期;k为周期与运动速度的对应系数;d为传感器中激励线圈的距离;v为颗粒运动速度;f为产生波形的频率;f采为A/D采样频率。
测试表明:采样速率由硬件A/D采样率决定,能够识别的流速范围是固定的,如果提高A/D采样率,可以提高检测的流速范围,但需要改变微处理单元处理速率,在整体设计中,传感器的功率会增加,产品能耗提高、可靠性下降。所以从工程实现的综合能力分析,明确传感器实际需求是设计传感器的功能参数的关键要素。
4.3 多颗粒测试
多种颗粒测试组合测试是此次试验的重要测试,试验中,将颗粒分别放置在探测杆的螺孔内,分别在a1=25 mm和b1=50 mm间进行了测试,测试时显示的曲线如图6所示。当金属颗粒相距不足a1时,相邻的金属颗粒的信号会发生交叉,信号的重叠降低了金属颗粒的检出率。当相邻的金属颗粒相距超过a1时,相邻的金属颗粒的信号不会发生重叠,传感器能够识别出两个金属颗粒。

图6 多金属颗粒测试曲线
4.4 振动环境复合测试
振动环境下考核传感器工作状态对所要求的振动谱的敏感性,综合考虑因素包括产品结构是否牢靠、传感器内的组件是否有敏感因素。在振动环境复合测试中,未发生测试平台和传感器工作异常情况,达到测试目的。
5 讨论
测试平台开发过程中尝试了5 m/s以上速率试验后发现,现有直线电机实际反电动势系数高于标称值若干倍,在高速运动中电机过高的端电压限制了驱动器的功率输出,使直线机构的最高运动速度限制在5.2 m/s以内,这是下一步工作中需要注意和改进的问题。
多类型粒径组合的识别目前尝试了5种组合,速率由0.1~5 m/s变化。试验发现高速率测试下粒径检出率低于低速率测试的粒径检出率,同时对于低速率的多类型粒径组合识别率也是今后工作中重点关注的问题。
6 结束语
机械系统滑油磨粒包含了机器是否正常运行、异常工作及失效风险的大量信息,通过磨粒在线监测和分析可以对设备的运行状态、寿命及潜在的故障风险做出评估和预测,对提高设备可靠性和节约运行成本有重要意义。近年来各国各行业都对油液的在线监测和相应的磨粒传感器技术十分重视,一些产品相继投入使用,新原理新技术不断出现。大量研究和实践发现,为了提升磨粒传感器检测能力和探究细微技术环节的影响,深入研究和开发高性能传感器将十分依赖高质量的测试和试验设备。目前国内在磨粒探测相应的测试技术方面与先进技术相比尚有不小差距,还没有形成相对统一的测试标准,因此迫切需要加强磨粒传感器的测试技术研究。针对一类先进航空发动机项目用的磨粒传感器开发需求,本文提出了一种综合了环境振动的干式无油测试平台方案并得到实现,通过直线电机、精密导轨、光栅反馈和数字控制技术的具体应用,获得了较高的控制精度和动态特性;利用多自由度关节连接和柔性非金属杆状构件作为标准颗粒物组的运动载体和特殊设计的支撑结构相结合,可防止测试中两向运动的干涉,并为不同测试目标提供了灵活选择。实验结果表明:测试平台的结构和控制性能达到设计要求,能够有效地为磨粒传感器研究开发提供一种新的测试手段。
猜你喜欢
大电机技术(2022年5期)2022-11-17
中国机械工程(2022年2期)2022-01-27
天天爱科学(2020年6期)2020-09-10
中学生数理化·高一版(2020年6期)2020-07-25
疯狂英语·新读写(2020年3期)2020-06-06
表面工程与再制造(2019年3期)2019-09-18
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
制造技术与机床(2017年4期)2017-06-22
船海工程(2015年4期)2016-01-05
中国铁道科学(2015年1期)2015-06-26
