基于机器视觉的带式输送机监控系统中输送带积水检测
2020-01-08 08:23:40苗长云王春华李现国
天津工业大学学报 2019年6期
苗长云,王春华,李现国
(天津工业大学 电子与信息工程学院,天津 300387)
带式输送机是一种现代化生产中的连续运输设备,具有运量大、运距远、能耗小、运费少、效率高等优点,广泛应用于港口、煤炭、矿山、电力和化工等领域。由于带式输送机的输送带上表面为弧形且一般在露天环境下作业,所以当发生下雨或洒水除尘等情况时,上输送带上表面极易产生积水。输送带上表面积水如不清理,带式输送机开机运输物料时将会造成运输物料的洒落,增加运输物料水分,如果运输煤炭则会降低其发热量,为此在开机运输物料前需要对上输送带上表面积水进行清理。目前,带式输送机监控系统没有积水自动检测与清理功能,清理积水的方法是不管上表面有无积水开机时开启积水清理装置,带式输送机空载运行一圈后再运输物料;或者人工检测积水,当发现输送带上表面有积水时,开启积水清理装置,清理积水后再运输物料。上述方法影响带式输送机的使用寿命,消耗电能,增加工作量。
目前,在积水检测算法方面,赵一兵等[1]提出了通过利用图像的纹理特征、颜色特征和亮度特征的积水检测算法,检测特征多,算法复杂,实时性较差,不适合于输送带积水检测。陈添丁等[2]提出了通过利用水体的高偏振度和水体区域的相似偏振相位特点对水体区域进行检测的方法,需要采集三幅不同偏振角度的图像,复杂度高。
针对以上问题,本文提出了一种基于机器视觉的带式输送机监控系统[3]中输送带积水检测方案和基于自适应阈值的输送带表面积水检测算法,并将积水检测功能集成在带式输送机监控系统中,以实现带式输送机中输送带积水的实时检测、计算积水面积和控制积水清理装置清理积水的功能,在港口、煤炭、矿山、电力等领域具有广泛应用前景。
1 输送带积水检测方案
带式输送机监控系统中输送带积水检测方案由带式输送机监控系统、以太网工业面阵相机、光源和偏振镜等组成,其组成示意图如图1 所示。
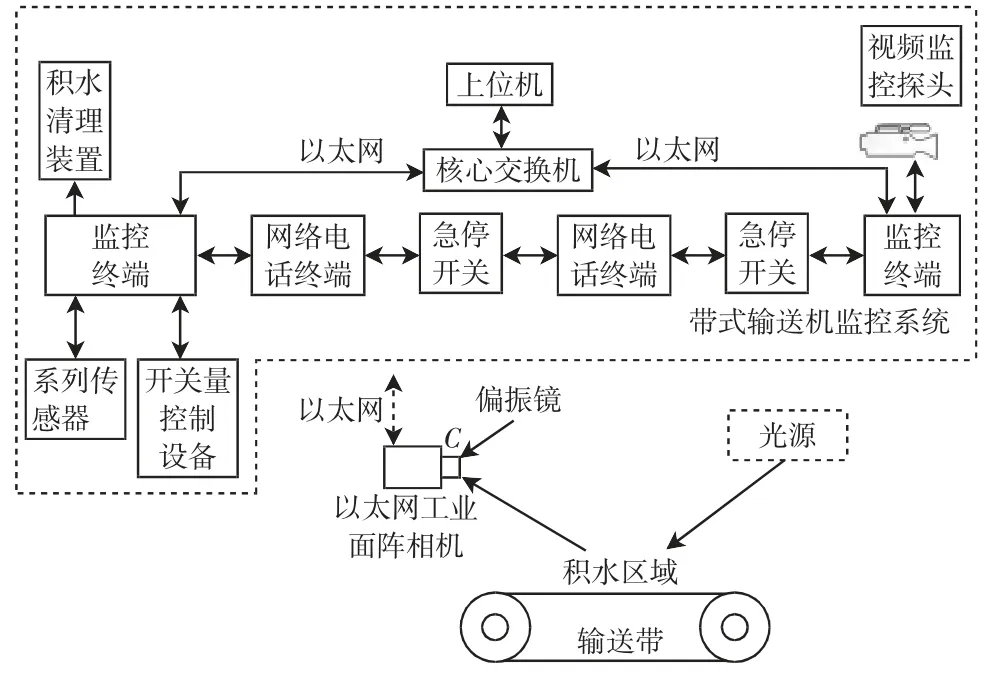
图1 积水检测方案组成示意图Fig.1 Schematic diagram of the water accumulation detection scheme
图1 中,带式输送机监控系统主要由上位机、核心交换机、监控终端、网络电话终端、急停开关等组成,能够实现对带式输送机状态监测和控制、电话通信和视频监控等功能。以太网工业面阵相机通过监控终端、急停开关或网络电话终端的以太网接口接入到带式输送机监控系统,用来采集输送带上表面图像并传输给上位机。上位机对上表面图像进行处理,利用积水检测算法实现对上输送带上表面的积水检测并计算积水面积,当积水面积超过设定值时控制积水清理装置清理积水。
为了保证以太网工业面阵相机采集输送带上表面图像的质量,经分析及实验,在相机镜头的正前方安装偏振镜,用于滤除输送带上表面反光的干扰,同时设置照明光源,解决了光照不足条件下图像的采集清晰度问题,提高了采集图像的质量。
2 输送带上表面积水检测算法
2.1 积水检测算法的流程
积水检测算法首先读取以太网工业面阵相机采集的原始图像,然后对原始图像进行数据格式上的转换,通过由GigE Vision 协议传输的原始像素格式转化为OpenCV 中的图像容器Mat 格式,并将该图像数据转化为单通道灰度图像以降低处理的数据量。接着通过计算输送带表面图像的均值得到自适应阈值,并通过定义感兴趣区域得到输送带分割图像。随后对分割图像进行阈值化处理得到积水区域轮廓,通过统计该二值图像中大于阈值的像素个数来判断是否是积水区域。在有积水的情况下,计算积水区域的面积,积水检测算法流程如图2 所示。

图2 积水检测算法流程Fig.2 Flow chart of water accumulation detection scheme
2.2 数据转换
GigE Vision 协议是一种基于千兆以太网的图像传输接口标准,具有传输距离长、传输效率高、兼容性好、适用于多种网络拓扑结构等优点。在该协议中,最常用的像素格式为Mono8,也就是8 位单通道的灰度格式。可以通过OpenCV 中Mat 类的构造函数得到Mat 对象,此时得到的图像是各通道的值都相等的三通道图像,为了减少处理的数据量,通过OpenCV 库函数转化为单通道灰度图像。
2.3 自适应阈值的确定与积水区域的分割
单一阈值对图像进行处理不能兼顾图像不同区域的情况,尤其是在光线复杂的野外环境。为了提高算法的鲁棒性,本文提出的算法通过计算输送带表面图像的均值获取到自适应阈值T,其计算公式为:

式中:L 为灰度级总数,这里是255;Zi表示第i 个灰度级的值;p(Zi)归一化直方图灰度级分布中灰度为zi的概率。获得自适应阈值T 之后可以对图像进行阈值化操作,也就是将图像中大于阈值T 的像素设为白色像素255,小于阈值T 的像素设为黑色像素0,此时图像中只有黑白两种像素,白色像素对应的区域即为积水区域轮廓的分割图像。其处理公式为:

式中:f(x,y)是原始图像的像素灰度值;g(x,y)是处理后的二值化图像;T 是阈值。利用符号函数可以把图像像素值为255 像素个数计算出来,计算方法为:

式中:sgn(x)为符号函数,累计符号函数为1 的次数即可得到大于阈值T 的白色像素个数。
2.4 积水区域轮廓面积的计算
图3 为积水面积和积水量关系示意图。
由图3 分析得出结论:积水区域轮廓的面积与积水量成正比关系,该面积的大小反应了积水量的多少。因此,通过计算积水区域轮廓的面积,当该面积值超过某一阈值时,发送命令给积水清理装置清理积水。
在OpenCV 中可以对二值图像的面积进行计算,用到的函数原型声明为double contourArea(InputArray contour,bool oriented=false),其中参数 contour 为输入的二值图像,该函数返回积水区域轮廓面积。
由于相机的拍摄方向和竖直方向有一定的夹角,如图3 中的角度A。为了精确计算积水区域的面积,需要对图像做一个视角的转换。根据视角变换后的图像计算积水区域面积更加精确,视角转换的公式为:

图3 积水面积与积水量关系示意图Fig.3 Schematic diagram of relationship between accumulated water area and the amount of water accumulated
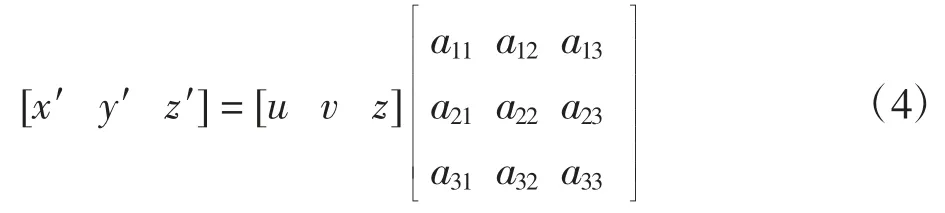
式中:由原图像中像素坐标u,v 对应得到变换后的图像中像素坐标x,y 为:

变换矩阵中包含了由“斜”的视角变为“正”的视角所需要的信息,其视角转换示意图如图4 所示。

图4 视角转换示意图Fig.4 Schematic diagram of perspective conversion
3 上位机积水检测软件设计
在带式输送机监控系统中的上位机用OpenCV 图像算法库和C++语言结合MFC 框架在Visual Studio平台上编写了积水检测软件,该软件实现了上位机与以太网工业面阵相机间的通信、相机图像采集参数的控制、相机IP 的设置、相机图像画面的显示、输送带上的积水检测以及输送带上积水面积的计算以及结果的显示,积水检测软件界面如图5 所示。

图5 上位机软件界面Fig.5 Software interface of host computer
图5 中,连接按钮通过发送搜索相机广播包搜索相机设备,相机应答之后可以对相机采集参数和IP 进行设置,其对应的IP 地址和主机网卡的地址也可以在上位机上显示;播放按钮通过开启拉流线程,获取相机图像数据,并开启图像显示线程,将图像显示在界面上方的方框内;积水定性分析通过获取一帧图像,并判断该图像中输送带上是否有积水,并将其结果显示在编辑框内,在有积水的情况下,分析其积水的面积,并将其结果显示在编辑框内。
4 实验结果与分析
4.1 输送带积水检测实验平台的搭建
为验证输送带积水检测方案和输送带表面积水检测算法,搭建了基于机器视觉的带式输送机监控系统中输送带积水检测实验平台,其实物如图6 所示。

图6 输送带积水检测实验平台实物Fig.6 Actual drawing of conveyor belt water testing experimental platform
该实验平台中的实验设备包括以太网工业面阵相机、矿用LED 光源、12 V 开关直流稳压电源、35.5 mm的线性偏振镜和带式输送机监控系统等,其中以太网工业面阵相机的图像分辨率为1 280×1 024,上位机积水检测软件编写平台使用Visual Studio(版本号Ultimate 13)以及OpenCV 图像算法库(版本号为3.1.0)。该实验平台设备型号及相应参数由表1 所示。
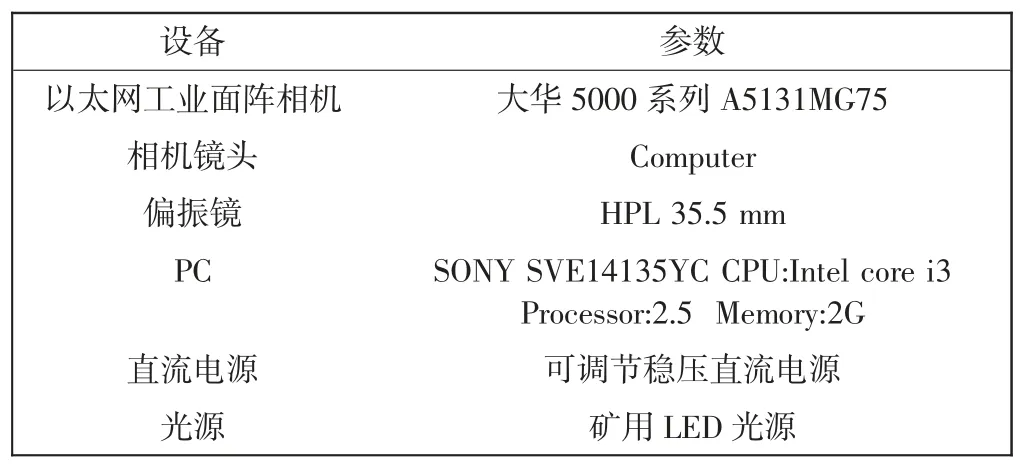
表1 设备型号及相应参数Tab.1 Equipment model and corresponding parameters
4.2 偏振镜滤除输送带表面反光效果实验
在阳光直射的情况下,输送带表面会出现反光,对于基于积水的高亮度特征的算法来说,反光会影响其检测的精度,通过在相机镜头的前方放置一个偏振镜可以有效防止这种现象。图7 展示了一组分别在无偏振镜和有偏振镜情况下的输送带表面图像。

图7 有无偏振镜下的输送带表面图像对比图Fig.7 Contrast image of conveyor belt surface with or without polarizer
由图7 可以看出,由于偏振镜的作用,算法的鲁棒性得以提高。
4.3 输送带表面积水检测实验及结果分析
给实验系统上电后,相机工作指示灯亮起,上位机识别到相机的接入并给相机分配IP 地址。通过上位机给相机发送图像采集指令,相机开启拉流线程,并运行积水检测算法对输送带上表面图像进行处理;通过开启光源,提高图像在光照强度低的情况下图像质量。图8 给出图像处理过程和积水检测结果。其中,根据经验值设N 为500。
此处积水面积为32 087.5,由于实验室环境限制,一部分积水区域被实验室窗户遮挡,导致积水区域面积计算不精确,在实际的输送带工作环境中,通过设置光源和调整适当的位置可以减少遮挡物的影响,得到更加精确的积水区域轮廓,从而得到更精确的积水面积。
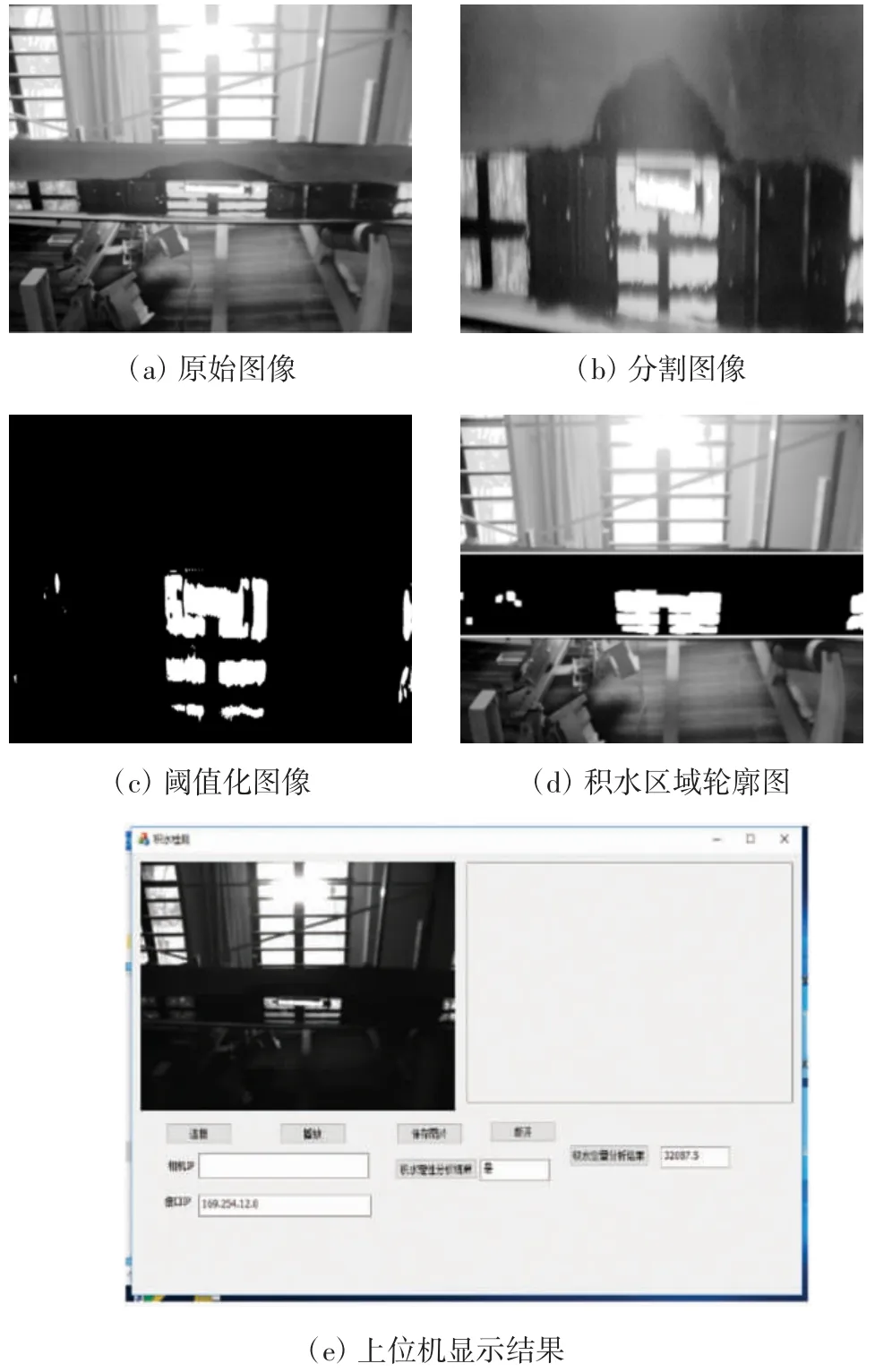
图8 积水检测结果Fig.8 Experimental test results
检测精度定义为检测出来的水体区域和实际的水体区域的比值,误检率为错误判断的积水区域占总样本的比例。本文的积水检测算法与文献[1]和文献[2]的比较如表2 所示。

表2 积水检测算法性能对比Tab.2 Performance comparison of stagnant water detection algorithm
由表2 可见,采用本算法对图像进行积水检测具有简单、高效等特点,保证了积水的实时检测,具有实际的应用价值。
5 结 论
本文提出了一种基于机器视觉的带式输送机监控系统中输送带积水检测方案和一种基于自适应阈值的输送带表面积水检测算法;采用OpenCV 图像算法库和C++编写了带式输送机监控系统上位机积水检测软件。搭建了基于机器视觉的带式输送机监控系统中输送带积水检测实验平台,实验结果表明该积水检测方案和算法实现了带式输送机中输送带积水的实时检测、计算积水面积和控制积水清理装置清理积水功能,积水检测精度达到98.4%,解决了现有的带式输送机需要人工检测积水的问题,在港口、煤炭、矿山、电力等领域具有广泛的应用前景。
猜你喜欢
中国生殖健康(2020年2期)2021-01-18 02:51:34
冶金设备(2019年6期)2019-12-25 03:08:52
小太阳画报(2019年11期)2019-12-06 08:00:11
制造技术与机床(2019年11期)2019-12-04 05:49:50
中国生殖健康(2018年2期)2018-11-06 07:10:56
设备管理与维修(2016年5期)2016-03-16 02:20:53
橡胶工业(2015年10期)2015-08-01 09:06:02
橡胶工业(2015年6期)2015-07-29 09:20:32
橡胶工业(2015年2期)2015-07-29 08:29:56
汽车维护与修理(2015年3期)2015-02-28 12:16:02