
彩虹-Ⅲ型无人机航空磁测系统应用示范效果评述
2020-01-08 03:37崔志强胥值礼
物探化探计算技术 2019年6期
崔志强,李 飞,胥值礼
(1.中国地质科学 院地球物理地球化学勘查研究所,廊坊 065000;2.国家现代地质勘查工程技术研究中心,廊坊 065000)
0 引言
无人机航空物探系统以其费用低、小型化、智能化、效率高、人员安全等优势,具有广阔的应用前景,日益受到航空地球物理界的广泛关注。将先进的无人机技术和航空物探技术相结合,研发智能化程度高的无人机航空物探测量系统,成为国、内外航空物探领域的一个重要发展方向。
着眼于无人机航空物探技术的优势,进入21世纪后,国际上多个国家都先后开展了无人机航空物探装备技术的研发工作,取得了显著的成果。据已掌握资料,最早开展此类工作的是英国Magsurvey公司在2003年研发了PrionUAV航空磁测系统(张洪瑞等,2007)[21]。在2004年-2013年间,荷兰、加拿大、芬兰、德国、日本等多个国家根据不同目的研发了相关的无人机航空物探测量系统[1-10]。这些无人机航空物探系统在矿产勘查、UXO探测、环境监测等领域开展了试验或应用,取得了较好的效果。其中最成熟的是加拿大UniversalWing公司利用Venturer型无人机集成铯光泵磁力仪形成无人机航磁系统,系统采样率为10 Hz,静态噪声水平为2 pT,并使用该系统开展了多次油气勘查测量工作。
国内相关研究工作起步于2008年,中船重工第七一五研究所最早开始了基于V750无人直升机平台的航空磁测系统。2009年-2011年间,中国科学院遥感与数字地球研究所和中国国土资源航空物探遥感中心分别利用航模型无人机和爱生ASN-216型无人机,搭载氦光泵磁力仪,集成了小型无人机航磁测量系统,均仅开展了试飞工作,尚未开展面积性测量[11-12]。2013年中国地质科学院地球物理地球化学勘查研究所(物化探所)基于彩虹-Ⅲ中型无人机平台和高精度铯光泵磁力仪,集成了彩虹-Ⅲ型无人机航空磁测系统,经过13 000 km的试验生产测试,改进完善了系统功能,各项技术指标达到国内航空磁测技术规范(DZ/T 0142-2010)(以下简称航磁规范)要求,系统噪声及测量精度达到国际先进水平。笔者使用该套系统已完成170 000余千米的高精度航磁测量工作。通过不断改进完善方法技术,解决了系统应用中存在的部分不足,提高系统的测量能力,对后续该系统的广泛推广应用具有重要意义。
1 系统研发与完善
2013年受中国地质调查局委托,物化探所启动了无人机航磁测量系统的研究工作。在中国航天空气动力技术研究院(航天十一院)的协助下,基于自主研发的彩虹-Ⅲ型中型无人机平台,采用电气隔离供电、数据采集和通讯协议转换多个转换单元,降低无人机和航磁仪之间的传导干扰,解决了电磁兼容、协议转换和辅助信号同步采集等系统集成问题,成功将CS-VL高精度铯光泵磁力仪和AARC510航磁数据收录及补偿器搭载于无人机平台上,形成了国内首套基于长航时中型无人机的航空磁测样机系统。系统采样率为10 Hz,静态噪声水平为2pT[13]。2014年通过基于地形滤波的多传感器融合高度跟随算法,综合考虑了飞机高空平飞、下滑过渡、末端拉平、低空巡航等不同飞行模态之间的转换,采用互补滤波器对无线电高度和气压高度进行融合,开发了超低空飞行控制律及其软件模块。通过对飞机油门、俯仰角、高度等参数的提前设置,保证整个飞行过程中飞行平台能够在各个状态间平稳过渡,实现了离地100 m~120 m的低空依地形平稳飞行能力。2015年采用电磁屏蔽、电气隔离、干扰源弱磁化处理等一系列技术手段,设计了飞行姿态精确控制磁补偿飞行方案,解决了无人机磁干扰背景大和补偿飞行机动动作不规范等技术,无人机磁干扰补偿精度优于0.08 nT。同时对系统的外形进一步改进优化,磁探头舱外形改为水滴状、并采用三角支架固定在机翼外延,增加了与干扰源的距离,而且增加了稳定性,提高了抗干扰能力(图1)。定型系统航速为170 km/h~200 km/h,最大航行时间为12 h,最大航程达2 000 km,最高升限5 000 m,测控定位精度优于±5 m,初步具备了高精度实用化测量能力。
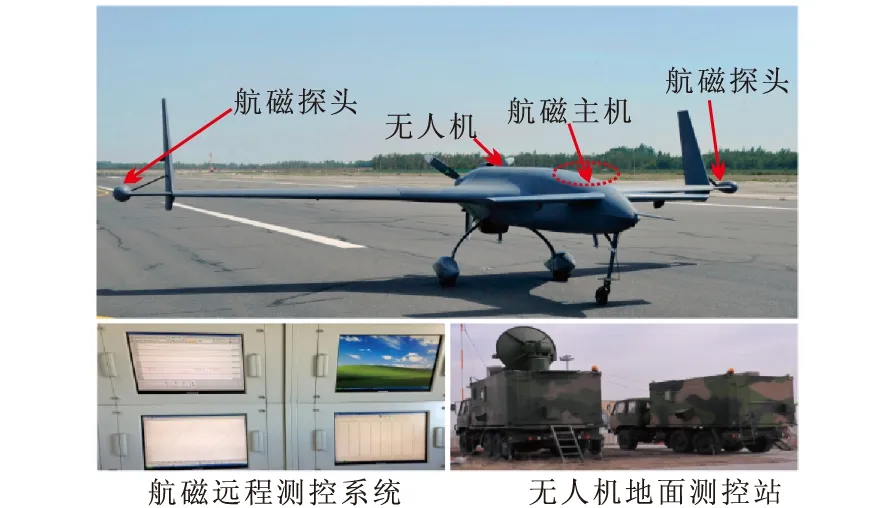
图1 CH-3型无人机航空物探测量系统
2 航空物探三维航迹规划技术
系统设计和改进完善解决了低空平稳飞行的机动性能技术问题,但由于系统在低空自主飞行是依据其自身获取的实时雷达高度数据进行,需前方超视距外地形高程变化率在小于无人机爬升率的情况下,在雷达高度有效飞行高度区间内才能实现自主飞行[14-15]。随着应用示范区域的不断调整,测区地形从低海拔丘陵浅切割区到中等海拔低山中等地形切割区,再到高海拔的盆山结合带地形深切割区。测区局部地形变化必然超出了飞机的爬升率,如采用无人机全自主导航飞行,无人机势必无法飞跃测线前方的高山,存在巨大的飞行安全隐患。为解决无人机在复杂地形条件下开展高精度航空物探测量低空沿地形缓起伏飞行的自主导航问题,开发了三维航迹规划软件。采用高精度数字高程模型,结合无人机的机动性能,对飞行测线事先进行三维航迹规划,实现无人机安全、平稳、低高度的完成复杂地形区的测量工作[16]。其基本思路是首先抽取测线对应的地形剖面,识别剖面上的所有高/低拐点,结合初始拟定的飞行高度,逐个对测线上地形拐点进行飞行高度调整和插值拟合,再采用同样的方法对各控制360°方位上一定距离范围内(通常以无人机的拐弯半径距离作为基准)邻近区的地形情况对测线上控制点的飞行高度进行二次调整,得到匹配无人机机动性能的飞行高度控制点数据,再进一步提取关键控制点,对各控制点设置相应的爬升或下降率,组成飞行测线的导航控制数据。在飞行前通过把导航控制数据预置进无人机飞控系统,无人机即可自主完成复杂地形的飞行测量工作。
通过软件实现该功能后,用于实际飞行测量中的飞行高度设定,在塔里木盆地南缘盆山过渡区用于效果较好。图2为盆地南缘其中一条测线进行的飞行高度规划和实际飞行高度结果(蓝色线为实际飞行高度曲线),可以看出,在进行飞行高度规划后,无人机能够根据航路控制点控制信息(主要含控制点高度和后续采用的爬升率或下降率),按照雷达高度依地形起伏飞行,基本实现了航迹设计可预期。图3显示是通过三维航迹规划安全越过地形高点和深沟的飞行实例,当地形变化在无人机爬升/下降率内的航段,无人机能够根据自身雷达高度进行沿地形起伏的超低空自主飞行,当地形出现突变点时需通过三维航迹规划实现平稳越障。图3(a)测线的危险点(蓝色圆圈处)为一陡立凸峰,地形变化超过了CH-3无人机的爬升率,需事先设定无人机在凸峰前的爬升点及相应爬升率,控制无人机在危险点前一定距离处开始脱离沿地形起伏飞行跟随状态,实现越障;图3(b)测线的危险点为一狭窄下切深沟,同样需事先控制无人机的下降率和提前爬升位置及爬升率,实现安全越障。

图2 复杂地形无人机飞行控制仿真计算与实际飞行结果对比

图3 测线实际飞行高度与地形剖面图

图4 塔里盆地边缘盆山过渡区的地形、测线飞行高度及航磁测量数据对比图
在地形较复杂地区,相邻不同架次、不同测线或不同飞行方向上的飞行高度差异过大会对飞行数据质量造成严重影响。图4 (a)~图4(c)、图4(d)~图4(f)分别是塔里盆地西南边缘盆山过渡区内两个邻近测量子区的航迹测控结果及航磁原始数据。两区地形情况相似,均是从北向南海拔快速升高,北端海拔在1 500 m左右,南端海拔近3 400 m。由于A区测量时未进行航高规划,可以看出相邻架次或同一架次不同飞行方向(向南或向北)的飞行高度(图4(b))差异较大,呈现出明显的南北向高低相间条带;而B区测量前进行了详细的航高规划,充分考虑了相邻测线的飞行高度变化,实测结果(图4(e))显示飞行高度与地形呈现出一致的反镜像关系,说明测量飞行时无人机能够依地形缓起伏飞行,在山前提前爬升,以较低的离地高度飞过地形高点。再从实测的航磁数据来看,由于A区相邻测线飞行高度差异过大,航磁△T平面图上的磁场梯度带延伸不稳定,呈缓波浪状,而B区的航磁数据则未表现出类似的现象,磁场梯度带平稳延伸。可以看出,在B区较A区地形相似甚至更复杂的情况下,通过使用三维航迹规划,不仅平均飞行高度较A区低近400 m,实现了较复杂地形的低空沿地形缓起伏飞行,获得了更高质量的航磁原始数据。
实践结果表明,该功能解决了系统在复杂地形区低空自主飞行过程中对前方雷达超视距外地形突变判断能力的缺失,不仅使之在前方地形突变的情况下能提前均匀缓慢爬升,可使相邻测线飞行间高度一致或均匀变化,使测线与切割线交点处飞行高度保持一致,并且该功能还能够保障无人机在沿测线飞行过程中,在测线上任一位置都能朝向任意方位实现紧急爬升避险或返航。这不仅保障了测线飞行中的飞行安全,也降低了在飞行测量过程中无人机机动幅度过大对测量数据的干扰,或相邻测线飞行高度差异过大对测量数据总体质量造成的影响,提高了系统的地形适应能力和测量数据整体质量。
3 主要测试指标及航磁数据质量
3.1 静态测试及指标
新系统在正式投入应用示范前,需严格按照航磁规范测试要求,整装系统在地面完成稳定性、静态噪声、阶跃响应、转向差等指标测试,同时需要与成熟系统进行一致性均优于达航磁规范要求。经多次测试,系统连续工作5 h稳定性任意10 s内在0.03 nT~0.08 nT之间(要求小于0.1 nT),采样率在1 Hz~10 Hz之间(可选),静态噪声水平在2.521 pT~7.263 pT之间(要求小于10 pT),阶跃响应时间在0.4 s~0.6 s之间(要求小于1 s),磁探头转向差在0.15 nT~0.65 nT之间(要求小于1 nT),5 h连续测量一致性差值范围0.146 nT~0.484 nT(要求小于0.5 nT),本无人机航空磁测系统各项技术指标均达到航磁规范要求。
3.2 磁干扰补偿及方向差
静态测试达到要求后,需对系统进行动态测试(磁干扰补偿及方向差测试)。高质量的磁干扰补偿是实现高精度测量的前提,针对无人机磁场干扰强,磁补偿飞行难于实施的问题,采用了干扰源弱磁化处理、飞行姿态精确控制的磁补偿飞行方案,通过精确的航路点、机动动作以及飞行速度计算,严格控制无人机的机动动作及幅度,强制无人机实现规定的动作,实现了系统的磁干扰补偿。
图5为2016年无人机磁干扰补偿后验证飞行中一条边的综合数据剖面,可以看出,在未补偿的原始数据中,当飞机进行偏航、侧滚和俯仰三组飞机机动动作时,引起了不同强度的规律性干扰异常;而经过补偿计算后的数据曲线平滑,有效地抑制了飞机机动动作造成的干扰,本次补偿精度达到了0.021 5 nT(优于0.08 nT的航磁规范要求),实现了高质量的磁干扰补偿。但也不难看出,该无人机平台无法分别单独完成侧滚和偏航姿态,在进行侧滚时需要一定的偏航辅助,在进行偏航时需要侧滚辅助,二者需相辅相成。由于是受无人机自身机动性能的限制,在实际测线飞行过程中亦是如此,因此对测量数据不会造成影响。从应用示范中的多次补偿结果看,补偿后标准差在0.016 nT~0.063 nT之间(均优于0.08 nT的航磁规范要求),满足高精度航磁测量的要求。
空中方向差测试是地面磁探头转向差测试的动态验证,也是后期进行数据调平的重要参数。其测试过程通常与磁干扰补偿飞行一并完成,在磁干扰补偿完成参数飞行及验证飞行并达到补偿要求后,在补偿飞行的四边形内进行十字交叉线的反向重复飞行,通过计算反向重复线在交叉点处的磁场差值,作为空中方向差测试评价指标,在测试过程中要求正/反向飞行航迹平面位置及飞行高度保持严格一致。多次测试的结果显示,航磁空中方向差多在0.6 nT~0.90 nT之间,满足航磁规范优于±1 nT的要求。
3.3 飞行测控精度
系统主要采用地面站无线电通讯测控,具有测控精度高、通讯及时等特点,大量应用示范结果显示,在飞行前对航迹进行三维规划后,单架次航迹平均偏航距离可优于±10 m,平均飞行高度较设计可控制在±5 m内,基本实现了设计可预期的目标。从在克拉玛依示范区的实际飞行数据来看,正式测量前开展了不同高度飞行控制律验证试验,最终确定全区平均飞行高度设定为130 m。实际飞行高度统计结果显示(图6),全区平均飞行高度为129.59 m,以127.72 m中心呈正态分布,小于150 m的测点占比为89.3%,飞行高度在100 m~150 m之间的数据点占比80%以上。偏航距统计结果显示:平均偏航距为8.23 m,偏航小于20 m的测点占比96.0%,测网疏密度为250±4.7 m,实现了高精度测控。
3.4 航磁数据质量
衡量航空磁测数据质量的优劣除依据上述的一系列静态测试指标和磁干扰补偿标准差外,动态噪声和测量总精度是两个重要的衡量指标。从多个示范区已完成实测数据质量指标统计来看(表1),随着系统的不断改进、飞行控制及相关辅助技术的不断提高,动态噪声水平逐渐降低,一级资料(≤0.08 nT)占总测点数达到99%。随着三维航迹规划的应用,主测线和切割线测网的飞行高度的一致性及飞行姿态的平稳性大大提高,调平前的原始总精度从早期的25.52 nT降低到2.77 nT,改善明显,调平后总精度均在2.0nT以内(均优于3 nT的要求)。在数据质量方面的提升主要得益于系统的改进和完善,其中可预期的飞行测控能力地实现起到了明显的作用。

图5 磁干扰补偿结果

表1 各示范区航磁原始数据质量主要指标统计表
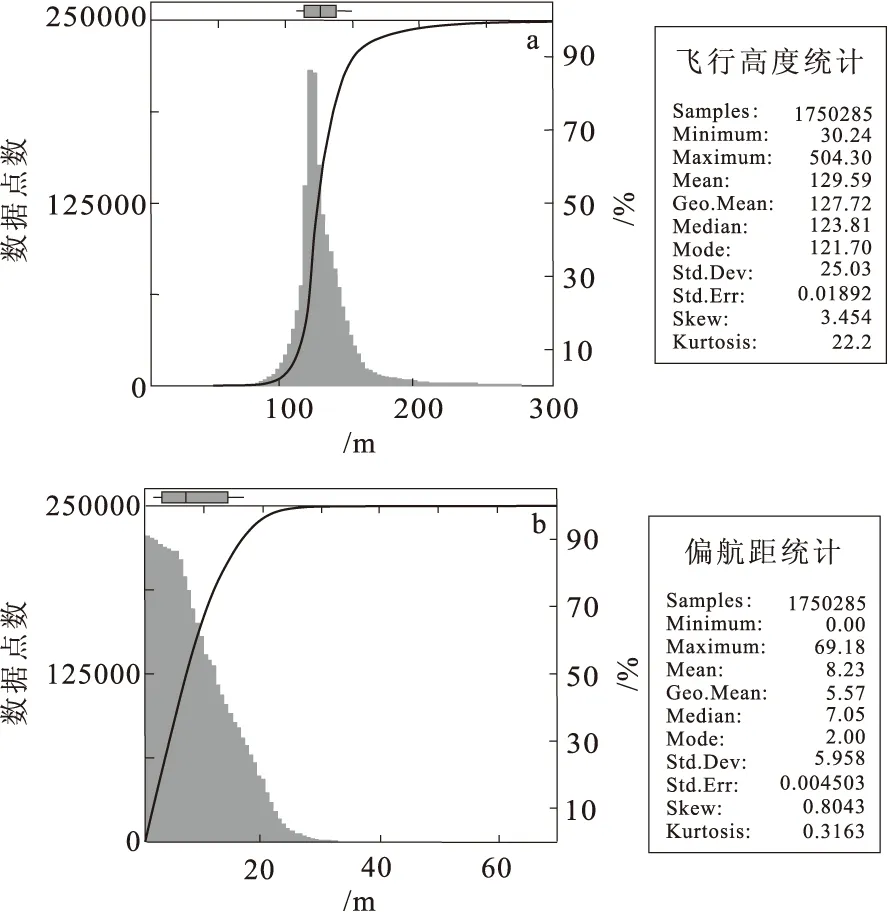
图6 示范区无人机飞行控制质量统计结果
4 测量效果评述
4.1 成果数据比对
从2013年开始,运用该套系统在我国东北和西北3个不同地形区进行了面积性测量示范,目前已累计完成测量逾17 km。示范区海拔从300 m~5 000 m,相对高差从<100 m~>3 000 m,勘查地质目标从多金属矿产到油气地质构造,均以优于设计要求的测量精度完成了飞行测量任务。图6、图7是航磁测量仪器精度相同的情况下,不同示范区的测量成果数据比对。

图7 东北某区Y12航磁系统与彩虹-3无人机航磁系统成果数据对比图

图8 西北某区固定翼Y12航磁系统与彩虹-3无人机航磁系统成果数据对比图
在成果数据的宏观对比上,Ch-3型航磁系统和成熟的Y12有人机驾驶航磁系统获取的磁场数据反映的主体异常完全相同,各主体异常的位置、形态、范围、异常强度以及异常间相互组合特征完全一致,综合显示该无人机航磁测量系统的测量数据真实准确。图7中北部的花岗岩体引起的强磁异常和中东部的火山机构引起的环形磁异常结构和图8中近东西向的超基性岩强磁异常带和北西向钾长花岗岩强磁异常等主体异常的宏观形态完全一致。
从测量成果显示的细节上看,无人机系统的测量成果对局部弱磁异常更加清晰,异常结构更加完整,数据总体质量更高,对进一步的数据资料地质综合解释更加有利。图8中部磁场平稳变化区内沿构造展布的北东向和近南北向两组弱磁异常带,图7北部低缓平静磁场区内的两组近南北向弱磁异常带以及北东向串珠状异常带,无人机航空磁测成果数据均较Y12平台测量成果更加清晰。这对进一步认识地质构造和追踪找矿有利区更加有利。
4.2 重复线质量
往返重复线测量不仅是对测量系统和数据质量(包括仪器精度、补偿水平、定位精度、数据修正水平等方面)的一个检验,是验证测量系统准确性、稳定性和可靠性的重要方法,也包括对飞行技术等因素的综合考量。笔者利用徐东礼等[17]提出的重复线测量数据均方差(即内符合精度)来量化重复线和测线磁异常的重合程度。图9是某示范区的4条重复线测量情况,除L210线局部航段受飞行高度影响外,同一测线两次重复观测的航磁曲线显示的异常形态、异常强度等一致性非常好,航迹重合度非常高。用内符合精度指标计算,L40和L160的航磁数据内符合总精度分别为:1.081 nT和0.707 nT,测线导航定位内符合总精度分别为:1.814 m和2.521 m。结果显示测量系统的稳定性、可靠性高;无人机飞行测控精度高,对获得高质量重复线测量成果至关重要。
5 塔里盆地西南部应用示范效果简述
从2015年开始,使用该系统在塔里木盆地西南部喀什至和田地区开展大面积的应用示范,目的是研究盆地的磁性基底起伏、推断断裂分布、圈定近地表的含油气有利局部构造,为地面综合物探工作提供基础数据和参考解释成果。该区地表大部为沙漠覆盖,整体地形平坦,自北向南逐渐升高,靠近盆地边缘的山前地带局部有高山,海拔从1 000 m至5 200 m,最大高差在3 000 m左右,形成沙漠区和高山区并存的特征。目前已累计完成约70 000 km2的测量工作,沙漠平原区的平均飞行高度为181 m(设计高度180 m),平均偏航距为3.4 m,测线平均动态噪声范围5.344 pT-69.542 pT,一级资料占总测点数的99.96%,取得了高质量的测量原始数据。

图9 重复线航磁数据剖面对比图
根据资料显示[18],盆地基底由太古界和下元古界变质岩系组成,具有较强磁性,基底上沉积有巨厚的太古界至新生界地层,除分布较集中的下二叠统上部火山岩层具有较强磁性和上第三系阿图什组砂岩具有弱磁性外,其余地层均为无或极弱磁性特征。本区大地构造位于塔西南坳陷南部与西昆仑山前冲断带的过渡部位,断裂构造发育,主要发育有推覆、反冲、走滑等多种性质断裂,各级断裂不仅构成了不同构造单元的边界,控制了盆地基底起伏,而且控制了上覆古生界—新生界沉积地层的展布,形成了一系列局部构造圈闭,其形成与演化控制了区内的油气运移和聚集成藏[19-20]。但地表大部被现代沙漠覆盖,仅在测区南部边缘有新生代、古生代及前震旦系基岩出露(图9(a))。
本区实测航磁数据显示(图9(b)),磁场总体非常平稳,宏观上由两组北东走向、相互平行的正、负磁异常相间排列构成,正、负异常之间缓慢平稳过渡,梯度平缓变化,正磁异常由由北向南逐渐降低,西南端融入沿西昆仑山前展布负磁异常中,在正磁异常带南端梯度带上局部可见10 nT~30 nT不等的局部叠加异常。结合本区岩石地层磁性特征不难推断,区域背景磁场为前震旦系盆地变质结晶基岩引起,磁场的相对高低分别是不同的基底岩相或基底隆坳格局的反映。区域磁场上自西向东分别为莎车-叶城低值区、叶城-皮山高值区、皮山-藏桂低值区和杜瓦-墨玉高值区,与之对应的基底岩相构造带分别是叶城弱磁复向斜褶皱带、皮山高磁复背斜褶皱带、藏桂巴扎弱磁复向斜褶皱带和墨玉强磁性复背斜褶皱带。
为对近地表局部圈闭进行研究,笔者对非线性滤波后的实测值进行水平二阶导数计算(图9(c)),同时参考多种转换图件,用以推断表生断裂、识别近地表的弱磁性局部构造。结果显示本区发育北东、南东两组断裂构成,南东、南东东走向断裂大多为由南向北的逆冲断裂,部分为由北向南的反冲断裂,北东走向断裂为压扭走滑性质,两组断裂剖面上相互制约,形成菱形格网构造格局。两组断裂对沉积盖层的空间展布控制明显,在深部对古生界或中生界地层形成大量的三角带构造、叠瓦逆冲构造等,在浅部对新生界巨厚的上第三系弱磁性砂岩层控制,形成大量的断层传播褶皱或断层转折褶皱,该组褶皱是本区上第三系重要的油气圈闭构造类型,这些由弱磁性砂岩构成的背斜隆能够引起几~十几纳特的局部异常,这些局部异常是浅部局部构造的直接反映。图9(c)中的椭圆状点线为综合圈定的与浅部弱磁性层有关的局部构造,这些由弱磁性局部构造引起的局部异常磁场水平梯度变化微弱,但数据单个异常显示形态规则,平面延伸稳定,与已知构造带吻合。主要可分为三条北西-南东走向的弧形局部构造带,分别是位于乌夏巴什以南的莆沙—桑株构造带(本区著名的柯克亚油气田即位于该构造带内)、叶城至乌夏巴什之间的棋北-固满构造带(含已知的棋北构造和指挥部构造)和叶城以北的捷得-布瓦什构造带(有已知的泽普构造和克拉克依构造),各构造带又由多个局部构造带组成,它们沿昆仑山前近似平行展布,其成因是受北西-南东向挤压断裂形成,而北东向挤压走滑断裂对个别局部构造有一定的破坏作用。使用空间域非线性滤波、小波变换等方法,剔除叠加在背景场上的局部异常或较微弱的短波异常,获得反映深部地质结构的区域背景场数据。采用欧拉反褶积方法,对分离的区域背景场进行深度计算得到本区磁性基底深度图(图9(d)),宏观上显示的基底隆坳格局与以往地质资料吻合。局部细节上反映出更丰富的地质信息,如北东向伸展的莎车鞍状凸起,夹持于叶尔羌河(F4、F2)和吐布拉孜断裂之间,与北西的英吉沙东部凹陷、南东叶城凹陷基底深度相差5 km~7 km,凸起西端受北西向莎车断裂(F1)控制。叶城以西的棋盘鼻状凸起自西向东基底深度从-3 km逐渐下陷至-10 km左右,并且受北西向的齐姆根挤压走滑断裂(F3)控制。并且在莎车鞍状凸起、棋北鼻状凸起、叶城凹陷等构造单元内还清晰的显示出一些次级隆起和洼陷,由于这些基底的局部隆起或洼陷大多是在海西—喜山期的构造运动中形成,因此其上覆古生界—中-新生界沉积盖层势必受到基底隆坳的影响,形成同形隆起或洼陷,这对进一步研究古生界及中新生界的含油气有利构造圈闭及古隆起型圈闭具有重要指示作用。

图10 塔里木盆地西南部无人机航磁成果数据与综合解释成果
从本区航磁数据显示的丰富地质构造信息来看,高质量的测量原始数据起到了至关重要的作用,尤其是对近地表新生界弱磁性岩层受构造影响形成的局部构造异常的识别,以及这些极弱构造磁异常在平面上的延伸展布情况。我们总结获取到高质量数据主要缘于无人机平台干扰小、测量精度高之外,精确测控和平稳飞行,以及均是在夜间磁场平稳、电磁干扰平静时段完成测量密切相关。
6 系统的优点与存在的不足
6.1 系统的主要优点
通过不同示范区的应用和改进,该无人机航空磁测系统的测量能力大幅提升,与传统有人驾驶飞机的航磁系统相比,其主要具有以下3方面的优势:①测量效率更高效,可全天时工作,能在夜间完成高精度测量工作,可利用时间窗口更多,一定程度上解决了有人驾驶飞机只能白天作业,且飞行时间窗口受限的问题,可进一步提高工作效率,从已知的150 000 km的应用示范显示,其综合有效测量效率可达120 km/h,单架次可飞行12 h,可完成有效测线长度超1 500 km的高精度测量任务;②获取的航磁数据质量更优,无人机系统本身干扰小,系统静态噪声、磁干扰补偿精度、动态噪声等指标均由于有人驾驶的航磁系统,并且无人机能严格根据计算仿真结果飞行,飞行高度、偏航结果可预期,飞行更平稳,此方面大大优于有人驾驶飞机,另外夜间工作外界干扰小、地磁场更平稳,能取得较白天时段测量更高的数据质量;③安全性更高、测量成本更低,无人机驾驶的特性能最大限度的保障人员安全,可有效防止复杂地形区超低空飞行安全对飞行员造成的安全隐患,交通运输的便利性和使用成本的经济性等方面均大大优于有人驾驶飞机,能有效地降低工作成本。
6.2 野外测量中存在的不足
由于彩虹-Ⅲ无人机航空磁测系统野外测量采用地面测控站无线电通讯控制,理论测控半径在90 km~120 km之间,无线电通讯信号的通视距离与飞行高度成正比,飞行高度越低,控制半径越小。通常航空物探要求超低空沿地形起伏飞行,通讯控制半径更加受限,实际通讯距离多在50 km~70 km之间,甚至更短。而航空物探测量区域通常较大,测区跨度从几十千米至几百千米不等,如采用目前这种地面测控站无线电通讯控制方法,势必只能将测区划分为若干个子区,每个子区单独架设野外地面控制站,或者野外同时架设多个控制站,进行接力控制。这两种方案无疑将大大增加野外工作的人力、物力投入,并且测量效率将受到严格限制,而且会造成长测线半线过多,大大增加数据处理强度,数据总体质量下降,也不利于后期数据资料综合解释。为了从根本上解决该问题,本项目开展了基于海事卫星通讯技术的无人机远程测控技术试验。通过安装海事卫星设备,并研发相应的通讯协议模块,使该套无人机航空磁测系统初步具备了海事卫星测控能力,在测区开展了数个架次的飞行试验,在数据链路保持、超低空测控精准度方面还需进一步完善,尚不能实用化。
7 结论
彩虹-Ⅲ型无人机航空磁测系统是目前国内首套开展面积应用示范的无人机航磁系统,通过在不同地区开展的针对不同目的、不同强度的测量任务过程中,进一步完善了系统集成及改进、方法技术研究与实践、过程操作及质量控制等方法技术,系统的综合性能得到进一步提高,航磁数据可靠、质量优秀。
该系统的成功应用,为国内航空地球物理调查工作新添了一种安全、高效、灵活、经济的新利器。在地质填图及区域地质构造、成矿带勘查、圈定含油气有利构造等方面可以发挥有人机航空物探系统相同的作用。同时,因其突出的夜航能力、运输便利性、高精度的测控和无人驾驶的特性,能更有效应对航空管制、复杂地形、安全风险高等,将在新形势下航空物探地质勘查中发挥重要作用。
猜你喜欢
舰船电子工程(2022年3期)2022-12-01
锦绣·中旬刊(2021年9期)2021-08-31
热带作物学报(2021年1期)2021-02-22
珠江水运(2020年22期)2020-12-23
民用飞机设计与研究(2020年4期)2020-11-27
科技信息·中旬刊(2018年9期)2018-10-21
科技风(2018年26期)2018-05-14
少儿科学周刊·少年版(2017年7期)2017-09-29
航空模型(2016年5期)2016-07-25
IT时代周刊(2015年7期)2015-11-11
