无人机遥感监测下配电线路终端故障检测方法
2020-01-05 07:03招志强陈建文
粘接 2020年12期
招志强 陈建文
摘要:针对配电线路终端故障检测“快、准、稳”的需求,为实现复杂现场遥感监测和故障检测,以最大限度确定配电网运行安全。研究构建了轻型无人机遥感系统,采用Phantom 4 Advanced型四旋八翼碳纤维轻质化无人机,以ARM9微处理器作为地面导航的主控模块,使用GPS信息自动规划航拍路径,融合Lightbridge圖传技术和无线通信技术进行遥感图像的传输,以实现低耗、高效的遥感监测;同时,为提高多尺度目标、小故障点的检测精度,引入了一种融合RPN结构的改进FasterRCNN,通过多尺度训练、相似性度匹配、OHEM样本均衡机制等改进FasterRCNN,以优化故障检测方法的鲁棒性,最后,通过对比实验,所设计方法在故障检测结果的完整度和准确性上均具有明显优势,可满足配电线路终端故障应急处理的要求。
关键词:多源干扰;遥感图像;配电线路;故障检测
中图分类号:TM755;V279
文献标识码:A
文章编号:1001-5922(2020)12-0176-05
0 引言
无人机遥感监测因灵活性强、操作简便、环境适应性强等,成为配电线路终端故障实时监测的首选方式,而限于多源环境干扰及长距离、大范围的监测需求,研究将以提升无人机的续航、即时飞停、海量存储的航拍控制性作为重点。同时,基于人工智能技术的进步,对无人机遥感监测图像的智能分析日渐成熟,一类为Faster RCNN、Mask R- CNN,一类为YOLO、SSD回归的目标监测算法[1],两类均可用于无人机遥感图像数据的智能分析。FasterRCNN因具有高精准的检测特性,更适用于配电线路终端故障的检测需求,但传统检测使用RPN进行候选区域划分时,均需要使用独立的卷积神经网络提取特征图,训练时间长且占用过大内存,而将各个独立使用的网络整合至一个卷积神经网络,可规避该问题;同时,基于配电线路终端早期故障检测点小、尺度多样,以最高特征图进行故障检测,容易出现漏检、错检问题,且基于故障点所占比例较小,负样本空间过大,引致了Faster RCNN样本失衡问题,为此,研究将以这方面的不足作为故障检测方法设计的重点。
1 配电线路终端的无人机遥感检测系统
配电线路周围多配设通讯、电力铁塔及线路,容易受到多种干扰源的影响,为灵活进行飞行控制、调整拍摄视角,以获取多目标的遥感图像,研究选用起飞灵活的旋翼无人机,从整体上,无人机遥感监测系统由无人机、航拍系统、飞行控制及地面监测等4大模块构成。
1)轻型旋翼无人机:为适应大范围、复杂环境下配电线路多目标、多尺寸的故障目标检测需求,研究选用由碳纤维材料制成的大疆精灵Phantom 4 Ad-vanced轻型无人机,其配设的FlightAutonomy系统,可实现无GPS信号下的精准悬停,能够适应各类配电线路终端故障检测的各类复杂场景。
2)航拍系统:无人机配有2000万像素的相机以及可实时调控镜头方向的云台,且机身前方的双目视觉传感器,检测距离高达30m,在15m范围内的障碍物前可自动调整飞行模式、悬停或绕行嘲。航线规划是航拍的关键,其应该覆盖故障点范围的平面,应该根据配电线路高程变化动态调整航线高度,飞行过低则续航时间要求过高,飞行过低则遥感成像不清晰。
3)遥感图像采集:无人机5h超长续航的遥控器集成Lightbridge高清图传技术,可在7km内传输和控制遥感图像,配置的5.5英寸1080P显示屏可高清观测遥感图像,且内置的DJG04可实时查看、编辑和分享遥感图像;而为扩充无人机遥感图像存储量,另增设Sdram、Flash两存储器,其中Sdrarn选用8MB的64kx16bit的HY57V641620芯片,用于存储航拍程序运行中的中间数据,Flash采用2MB的256kx16bit的SST39VF400芯片[3-4],用来存航拍视频。完成遥感图像采集后,采用无线通信模式,利用编码正交频分复用方式来规避多径效应,以实现遥感图像与地面监测站的远距离传输,满足配电线路长距离监测需求。
4)地面监测:该模块主要向无人机发送定点航拍的任务指令,控制器航拍轨迹,并接收配电线路终端的遥感监测图像,而复杂环境下无人机遥感监测下,需要实现灵活飞停、自主定点航拍的功能,为此,该地面控制采用并行处理能力的ARM9200微处理器,其通过内部程序输出PWM驱动脉冲,可协同操控多个无人机的舵机[5],用以完成大范围、多目标的遥感监测任务。
2 配电线路终端的故障检测方法
2.1 Fast RCNN故障检测方法
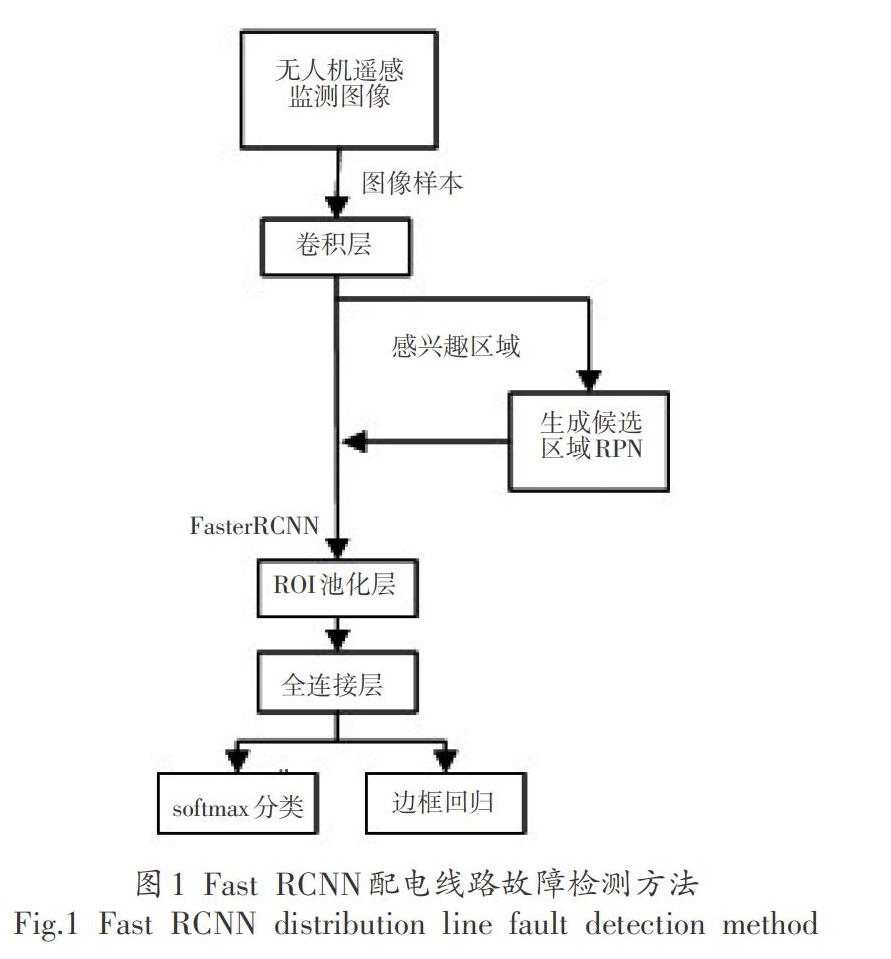
Fast RCNN主要由特征提取网络、RPN区域建议网络和Fast RCNN故障检测等3大模块构成[6],配电线路终端故障检测时,可先将获取的遥感图像数据集输入卷积神经网络的卷积层,此处选定ResNet50深度残差网络对遥感图像进行特征提取,获得最高特征图后,采用反池化法对其进行采样,生成低特征图,并与原各层特征图将融合;而后,利用RPN区域建议网生成候选区域,将其映射至融合的特征图中,得到相应的特征值,便可基于“注意力”机制,指引FastRCNN在候选框中进行故障检测,利用ROI池化层生成固定尺寸的特征图输入至全连接层中,引入探测softmax分类概率和边框回归生成配电线路终端故障所属类别概率和区域坐标[7],即可实现故障检测。基于Fast RCNN的配电线路终端故障检测方法如图1所示。
2.2 基于RPN生成候选区域
在Faster RCNN检测模型中,Selective Search为提取候选框方法,但其耗时高,而RPN本质是“基于滑窗的无类别obejct检测器”,可将物体检测整个流程融人Faster RCNN,耗时低,为此,研究采用RPN网络生成候选区域,首先将无人机遥感检测图像输入ResNet50卷积网络,采用3x3的卷积核以滑动窗口的形式生成候选目标位置,并以每个位置为中心映射至原图上得到9个锚定框[8],如此,便得到大量的锚定框。为从中筛选出对配电线路终端故障检测最有效的建议区域,需要利用探测softmax和边框回归对RPN候选框进行联合训练,具体步骤如下:
1)采用探测softmax分类方法,以锚定框与真实框之间的IOU比值,为每个锚点分配一个二进制的标签,正标签分配给IOU比例值高于0.7的锚定框,将负标签分配给所有IOU比例值小于0.3的锚定框,以区分前景(物体)和背景[9]。
2)为让多任务损失目标函数最小,以将锚定框映射至与真实框更趋近回归框,首先,设配电线路终端故障遥感监测图像的损失函数为[10]:
根据IOU值可剔除多数无用锚定框,为简化Fast-er RCNN检测模型,去除冗余,可使用NMS非极大值抑制方法将选出的锚定框进行是“前景(物体)”值排序,保留得分最高的,删除与其重叠面积过大的其他锚定框。
3 RPN+Faster RCNN故障检测方法的优化设计
3.1 多尺度、小目标的RPN训练
无人机遥感监测下配电线路终端的目标尺寸不一,而传统的Faster RCNN对遥感图像多采用固定尺寸,对于多尺寸检测目标的适用性较差,为此,研究在将无人机遥感监测图像输入RstNet50特征提取网络之前,根据故障检测目标成像清晰度,随机调整图片大小,生成多尺寸进行RPN训练,以适用故障检测目标的多尺度特征,提升检测准确性。
同时,无人机遥感监测时,需要检测出绝缘子、变压器、杆塔等等多目标故障,而小目标因分辨率低、遮挡、形变等多源干扰,RPN无网络中默认的锚点参数无法召回故障点较小的目标,仅可对最高层特征图进行特征提取及分类,很容易丢失低层特征图中的小目标故障点,影响配电线路终端早期故障的识别。针对此,为实现低层特征图对小目标的识别性,研究基于RPN网络生成一系列的目标候选位置,并赋予其置信度得分,而后,利用NMS筛选局部极大值,将具有较高置信得分的候选目标作为特征模板,而较低置信得分的候选目标因无法与其他目标或背景区分,需与特征模板进行相似度匹配,以实现对初步局部极大值的进一步筛选,若匹配,就可加入检测之中,以避免小目标故障漏检的问题。这其中,特征模板与底层特征图中的候选目标相似度匹配步骤如下:
1)构建模板的图像特征。利用卷积神经ResNet50通过逐层卷积将原始的无人机遥感监测图像层层映射,因各层特征对原始遥感图像的表达能力不同,为了提取更具故障检测力特征作为模板,需要分析各层特征对不同类别的区分度。
2)将卷积层的特征尺度设为Kx WxH,其中,K为该层卷积特征图的数量,W×H为特征图的大小[13],研究选用汉明距离表示高低层特征之間的距离,距离越大,则相似度匹配越高,公式为:
3.2 基于OHEM机制的RPN训练样本均衡
Faster RCNN故障检测时,因配电线路终端故障点目标在遥感监测图像中所占比例较少,存在负样本过多的问题,造成正负样本失衡,RPN网络在进行分类时容易将错误目标误判为正确的且置信分数较高的样本,此即为困难样本。以往的均衡方式是使用特定比例的正负样本进行分类器训练,而后,再用测试集进行检测,提取困难样本加入初始训练集中重新训练,但每次训练所需的固定模型在卷积神经网络中无法实现。为此,研究引入OHEM机制,来解决FasterRCNN网络框架RPN训练中负样本过多的问题,将Faster RCNN的ROI池化层以后设定为ROI网络,通过OHEM机制的引入,将原有的1个ROI网络拓展为可共享网络参数的2个ROI网络,一个为只读,根据式(1)计算全部候选区域的loss值并排序,选定loss值较大的部分候选区作为困难样本,将其输入另一个ROI网络进行训练,并输出预测的配电线路终端故障的分类结果和位置,该方法不依托于正负样本的比例来解决失衡问题,可提升Faster RCNN故障检测的准确性。
4 故障监测方法的应用分析
4.1 检测准确性分析
无人遥感监测下配电线路终端故障检测结果准确性,可利用目视解译将其与已知参数数据进行比较,但该方法无法量化,所以,研究引入完整度和准确度来评价故障检测的结果。
完整度计算公式为:
式(6)中,TP为检测出的配电线路终端故障数量,TN为未检测出的配电线路终端故障数量。
准确度计算公式为:
式(7)中,TP为正确检测出的配电线路终端故障数量,TN为错误检测出的配电线路终端故障数量。
为验证RPN+FasterRCNN故障检测方法优化前后的准确性,选用能见度较好、风力4级以下的2019年5月2日、8月10日、10月2日等3次获得的500张遥感监测图像,通过多尺寸、相似度匹配、OHEM样本均衡机制等改进FasterRCNN,对配电线路终端故障进行检测,对比其与原始的FasterRCNN方法的差异,所得结果如表l所示。
由表1可知,改进的FasterRCNN的完整度,准确度分别达到了91.98%、94.37%,较未改进前的配电线路终端故障检测有明显的提升,这是因为通过多尺寸、底层特征图小目标与高层特征图相似度匹配后,其对于小目标故障点的漏检率显著改善;且引入OHEM机制,使用困难样本进行标准RIO网络训练,有效解决了正负样本失衡的问题,改善了错检的问题。
4.2 改进设计的效果
为检验FasterRCNN故障检测方法优化设计的有效性,将分析3种改进策略不同组合下的配电线路终端故障检测效果,结果如表2所示。
由表2可知,改进设方法1和2相比,通过对无人机遥感监测图像的多尺度训练,配电线路终端故障检测准确度提升了0.93%;改进方法2和3相比,通过底层特征图与特征模板的相似度匹配,使得RPN+FasterRCNN的网络模型对于小目标故障检测的鲁棒性更优,对应的配电线路终端故障检测准确度提升了1.03%;改进方法2和4对比,通过OHEM困难样本机制引入,可均衡训练网络中正负样本,优化故障目标的检测率,可见,上述针对RPN+FasterRCNN故障检测模型的3种优化设计方案,任意一种均能够提升配电线路终端故障的检测准确性。
5 结语
无人机遥感监测具有高效、宏观、高分辨率的优势性,在配电线路终端故障检测和应急处理中应用广泛,而上述提出的无人机遥感监测,创新点在于扩增了存储量、简化了起飞操控、并改进了图传技术,实现了在复杂、多源干扰下场景的遥感图像的快速采集及回传;同时,在故障检测方法上,所提出的改进RPN+Faster-RCNN网络模型,从多层面优化了对不同故障目标的监测敏感度,相较于以往的先检测故障线路电流波形再进行聚类分析、诊断故障的算法,效率和准确性更优。
参考文献
[1]谢桦,陈昊,张沛,配电线路多源数据挖掘时变故障概率计算[J/OL].电力系统及其自动化学报,2020( 09):63-67.
[2]邹敬龙,配电线路故障在线监测装置自动化检测技术的实际应用[J].机电工程技术,2019,48(12):213-215.
[3]王伟贤,李钟慎.lOkV配電线路防雷改造探索[J].国外电子测量技术,2019,38( 12):107-110.
[4]王超洋,樊绍胜,刘铮,等,基于改进FasterRCNN的配网架空线路异常状态检测[J].电力学报,2019,34(04):322-329.
[5]陈晨,杨晶,吴亮.无人机遥感监测下大气污染源追踪定位仿真[J].计算机仿真,2019,36(06):32-35.
[6]沈伟奇,崔风情,陈士俊,等,基于雷达探测的输配电线路综合驱鸟系统研究[J].电子测量技术,2019,42(11):1-4.
[7]王勇军,李智,孙山林,等.轻小型无人机遥感组网飞行的高程安全监测冗余容错算法研究[J].地球信息科学学报,2019,21(04):542-551.
[8]陈丹,林清泉,基于级联式Faster RCNN的三维目标最优抓取方法研究[J].仪器仪表学报,2019,40 (04):229-237.
[9]高明,赵振刚,李英娜,等,基于光纤传感的输电线路杆塔倾斜监测研究[J].电子测量与仪器学报,2018,32(12):51-59.
[10]李辉,钟平,戴玉静,等,基于深度学习的输电线路锈蚀检测方法的研究[J].电子测量技术,2018,41(22):54-59.
猜你喜欢
电子技术与软件工程(2016年20期)2016-12-21
中小企业管理与科技·上旬刊(2016年11期)2016-11-28
科技视界(2016年21期)2016-10-17
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科技视界(2016年20期)2016-09-29
企业导报(2016年13期)2016-07-19