基于灰色关联算法在多目标跟踪环境下的研究
2020-01-03 10:09周敏张浩王耀林
现代信息科技 2020年14期
关键词:灰色关联
周敏 张浩 王耀林

摘 要:针对在密集杂波中采用联合概率数据关联需频繁拆分关联矩阵,导致关联过程中涌现大量运算,易引发系统崩溃等问题的出现,对数据关联算法进行了研究,概率数据关联算法虽计算过程相对有所简化,但不适于复杂的多目标跟踪的状况,因此引入了灰色关联的思想对联合概率数据关联进行部分优化,即在建立关联矩阵前剔除一部分虚景及杂波,提高数据的关联性与跟踪的实时性。
关键词:联合概率;灰色关联;数据关联;频繁拆分;大量运算
Abstract:In order to solve the problem of frequent splitting the incidence matrix when using joint probabilistic data association in dense clutter,resulting in a large number of operations in the association process and easy to cause system collapse,the data association algorithm is studied. Although the calculation process of probabilistic data association algorithm is relatively simplified,it is not suitable for complex multi-target tracking. Therefore,the idea of grey correlation is introduced. In order to improve the correlation of data and the real-time performance of tracking,we want to optimize the association of joint probability data,that is to remove part of the virtual scene and clutter before establishing the association matrix.
Keywords:joint probability;grey correlation;data association;frequent splitting;massive operation
0 引 言
在科技高速发展的现代电子战争中,航迹起始、航迹预测、航迹更新、航迹的关联与融合等数据处理环节作为目标跟踪中的重要环节,每一步的处理都对目标跟踪过程中的轨迹精度有影响,所以每一环节的数据处理都至关重要。本文针对校内雷达目标跟踪项目中存在的航迹关联过程计算量大,精度不足等问题进行分析,以某公司的空中目标跟踪为基础研究对象,重点分析和研究了航迹关联算法。当前,应用在航迹关联过程中的算法主要分为两类:基于统计知识和基于模糊数学。基于统计知识的一类航迹关联算法是通过构建相关检验统计量的方法进行假设判断;而基于模糊数学的方法是通过对不同航迹间的隶属程度来判定航迹是否关联。常见的航迹关联法有最近邻数据关联算法、序贯航迹关联法、概率数据关联法、联合概率数据关联法等,常见的最近邻数据关联算法适用于杂波较少的单目标跟踪场景,优点是计算量较小,不足是当杂波较多时关联的精度误差偏大;概率数据关联法适用于杂波环境下的单目标跟踪,缺点是对于多目标跟踪实现较为困难。针对以上两种算法的不足,联合概率数据关联算法可在复杂的多目标跟踪中实现良好的跟踪效果,只是計算量会偏大,因此,本文拟通过灰色关联法对量测点迹做前置处理,进一步简化联合概率关联的计算量,提高运算效率。
1 灰色关联分析法
1.1 灰色关联分析法原理
首先,灰色关联分析法衍生于灰色系统理论。作为灰色系统理论的重要动态分析方法,其主要依据各因素的几何变化曲线相似程度,进行各因素间关联程度的判断。当参考数列曲线与比较序列曲线变化方向和速率越接近时,说明二者的关系愈加接近;反之则关联的可能性较小。其次,灰色关联分析既可用于描述因素之间发展态势的相似程度,也可用于描述各因素之间的相异程度,增加了关联分析的灵活性。在比较因素关联度时,为了避免不同比较因素的数据量纲对数据关联度计算阶段产生影响,从而产生精度误差,需要对其选取的要分析的因素进行某种数据处理后,再依据各因素发展态势间的关系确定其灰色关联度。
1.2 灰色关联分析法实现步骤
灰色关联法常应用在数学建模领域,通过对因素关联度的比较,判断对结果产生最大影响的元素。将灰色关联思想应用在航迹关联中时,主要用于判断某时刻T时的量测点迹群中与已形成的航迹关联度稍大的部分点迹,具体灰色数据关联步骤如下:
式中,ζ为分辨系数,在0~1之间,分辨系数ζ越小,关联系数的分辨力越高,当令ζ=0.48,关联系数小于0.5时,则认为该比较点迹与参考点迹不匹配,在量测点迹群中移除该点迹,将满足条件的点迹视为有效量测点迹继续传入联合概率关联方法中进行关联矩阵的建立,利用卡尔曼滤波进行航迹的更新。
2 联合概率数据关联算法
2.1 联合概率数据关联算法原理
联合概率数据关联作为航迹关联的方法之一,能较好地应用在多目标跟踪的复杂场景下,尤其是遇到跟踪目标交叉运动的场景,联合概率关联法认为落入波门中的所有量测数据都来源于某个特定的目标,不同的仅是各量测点迹来源于各目标的概率。根据以上思想,联合概率数据关联方法主要通过关联矩阵的建立与拆分,来判断每个量测点迹来自目标的概率,达到期待的目标跟踪精度,其优点是在复杂的杂波多目标跟踪环境下依然能达到良好的跟踪精度,不足之处在于,当杂波很多,跟踪目标的数量也很多的情形下,面对矩阵的建立与拆分的频繁操作,无疑降低了算法的运算效率,同时降低了跟踪的实时性效果。
2.2 联合概率数据关联算法实现步骤
步骤1:确认矩阵的建立:令矩阵中的行代表各个量测点迹,矩阵中的列代表各个目标的跟踪门,在矩阵中元素值采用二进制的形式表示,当矩阵内的元素值为1时,表示该行所代表的量测是在对应列的跟踪门内,当值为0时则代表该量测点迹并不属于可以落在对应列所代表目标的跟踪门内的有效量测点迹。
步骤2:确认矩阵的拆分:因为每个量测点迹只会来自一个源目标,同时也只能有一个量测点迹以它为源目标继续运动,所以在拆分矩阵时应确保拆分后的矩阵中每行只有一个1,且除第一列之外的每一列只有一个1。
式中,βuv为有效量测点迹与目标的关联概率,Xv(k|k)为有效量测点迹所处位置,其中若当前时刻无量测点迹落入跟踪波门内时,采用上一时刻卡尔曼滤波的预测位置作为该时刻的位置状态。
3 算法的优化
数据关联主要有应用在电子战争中的空中目标跟踪的航迹起始阶段的点迹与点迹关联、航迹更新过程中的点迹与航迹关联。这里运用灰色航迹关联法从密集杂波环境下落入目标跟踪门中的若干点迹中选中与已有的目标运动轨迹最接近的一部分点迹,之后将这部分符合筛选条件的量测点迹进行联合概率处理,通过各量测点迹的关联概率与所处位置融合估计目标的观测位置,与源航迹进行关联,运用卡尔曼滤波算法完成对航迹的更新和预测,循环执行此操作。
4 算法仿真与分析
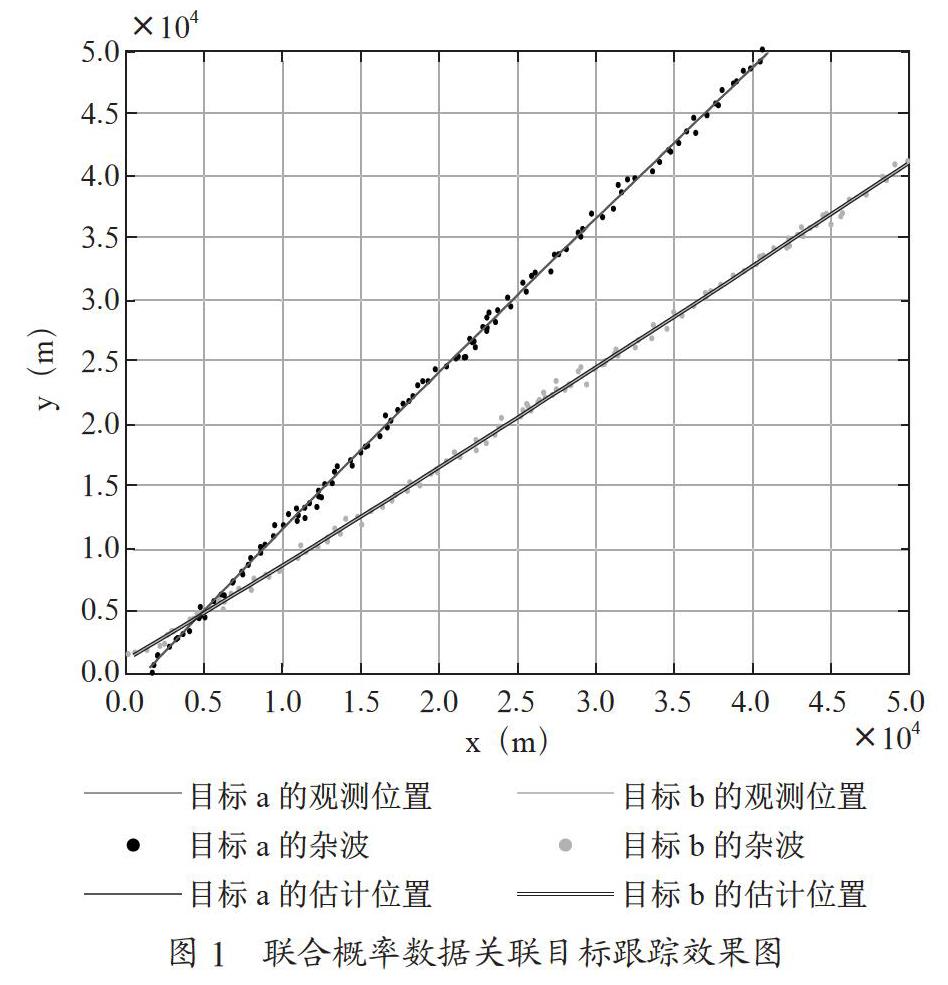
传统联合概率航迹关联跟踪效果如图1所示,针对优化的算法进行进一步仿真,优化后的跟踪效果如图2所示。
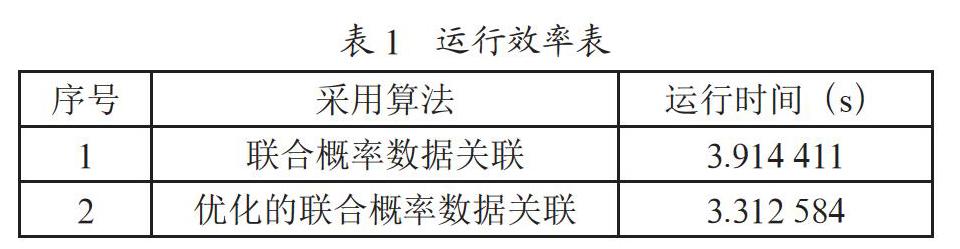
应用的仿真软件为MATLAB,仿真环境为二维场景下的双目标跟踪,两个目标的初始运动位置分别为(1 500 m,500 m)和(500 m,1 500 m),两个运动目标分别以(300 m/s,400 m/s)和(400 m/s,300 m/s)的速度运动,同时假定采样周期为T=1 s,杂波的均值为100。通过对比两种算法下的目标跟踪效果,发现跟踪的精度没有太大波动,由表1可知改进后的算法在运行时间方面缩短了约600 ms。
5 结 论
本文主要介绍了灰色关联算法与联合概率航迹关联算法,通过对跟踪波门中的若干点迹与参考点迹计算关联度,剔除波门中的部分无效点迹,对于满足筛选条件的量测点迹才继续进行联合概率数据关联的计算。改进后的算法既弥补了采用概率航迹关联算法不能适应跟踪复杂的目标运动场景的不足,又减少了大量的关联矩阵的建立与拆分,与单一的联合概率数据关联算法相比,降低了时间复杂度,提高了算法的实时性与可用性。在灰色关联分析中,由于分辨系数和关联系数是手动设置的,所以不可避免地会出现筛选结果不理想的情形,所以发现在筛选点迹中该灰色关联算法还有待继续改进和优化,关联效果也有待进一步提升。
参考文献:
[1] 韩敏,张瑞全,许美玲.一种基于改进灰色关联分析的变量选择算法 [J].控制与决策,2017,32(9):1647-1652.
[2] 车驰.要地防卫毫米波雷达航迹融合与目标跟踪算法实现与研究 [D].成都:电子科技大学,2019:23-30.
[3] 孟祥瑞.核相关滤波跟踪方法研究 [J].现代信息科技,2019,3(10):14-15+18.
作者簡介:周敏(1995—),女,汉族,辽宁锦州人,硕士,研究方向:物联网技术及应用。
猜你喜欢
中国集体经济(2017年4期)2017-02-27
西部金融(2016年8期)2016-12-19
合作经济与科技(2016年24期)2016-12-07
经济师(2016年10期)2016-12-03
商(2016年34期)2016-11-24
河北经贸大学学报(2016年6期)2016-11-11
财经理论与实践(2016年3期)2016-06-06
中国市场(2016年8期)2016-03-07
湖北农业科学(2014年3期)2014-07-21