
水下鱼池清刷机器人系统设计与试验分析
2020-01-02 02:43胡勇兵李金刚程斌斌
渔业现代化 2019年6期
黄 达,倪 琦,胡勇兵,李金刚,程斌斌
(1上海海洋大学工程学院,上海 201306;2 中国水产科学研究院渔业机械仪器研究所,农业农村部渔业装备与工程技术重点实验室,上海 200092)
工厂化水产养殖鱼池材质一般为混凝土或玻璃钢,其规格大小一般有直径6 m的圆形池或边长3 m的方切角池等。其中,玻璃钢材料表面积大且耐磨,其内表面光滑可减少对鱼的损伤,也能避免微生物附着,容易清洗。目前鱼池清刷主要分3个阶段:其一,养鱼前需要对鱼池清刷消毒;其二,导池分池阶段对鱼池进行清刷排污;其三,养鱼结束后对鱼池进行全面清刷和维护。这3个阶段目前都需要工人在水下手持板刷清刷鱼池,由于池底和池壁光滑,容易出现安全问题,而且劳动强度大、工作效率低。所以,面向工业化水产养殖,研究水下鱼池清刷机器人十分必要。
查阅文献可知,目前国内外针对水下鱼池清刷设备还没有相关研究,但是水下清刷装备国内外研究比较早,目前已有相关产品运用于生产实践。郭根喜等[1- 2]针对深远海网箱养殖网衣堵塞问题,运用高速水流驱动叶轮旋转,在反冲击力的作用下,使固定在工作盘上的清扫刷在网衣表面进行摩擦式旋转清洗;国内孟庆鑫等[3- 4]最早开始研究水下船体清刷机器人,设计出运用磁吸附履带机构的水下船体清刷机器人,为船体清刷机器人研究提供理论基础;杨强等[5]对遥控泳池清洁机工作原理、模型方程以及系统设计提供研究方法。美国海军研发出水下船体自动维修工程车[6],该维修车不仅可以清刷船体表面,还配有各种传感器用于检查清刷质量以及钢板厚度,辅助船舶检查和保养工作。英国研究人员设计出一款泳池吸污机[7- 8],利用履带式行走装置可以在池底自主爬行,四周绕行,通过马达将水中沉淀物和悬浮物吸入机器中,经过过滤排出干净水。日本九州大学研究人员设计了一款可以检测清刷效果的水下清刷机器人[9],该机器人携带水下摄像机,通过照片分析清刷效果。
根据国内外现有的水下清刷装备,设计出针对工厂化水产养殖鱼池的清刷机器人,其中包括结构设计及系统控制,建立相关力学模型和动力学分析。现阶段样机试验仅考虑清刷池底,在后期试验中增加对池壁自主爬行和清刷。清刷机器人应按照预先设计的路径完成清刷作业并开展样机试验。
1 清刷机器人工作原理与系统组成
鱼池清刷机器人既要具备清刷运动又要兼顾行走运动。清刷原理:电机通过减速器带动清刷机构的刷盘旋转,从而实现清刷运动[10]。行走原理:电机通过链轮带动前导向轮转动,带动清刷机器人不断往前运动。当清刷机器人在水下要转弯时,只要满足两个驱动轮差速行驶,即可实现转向。图1所示为水下鱼池清刷机器人系统组成,其中,供电系统是动力来源;控制系统控制各个系统协调工作;运动系统和清刷系统执行控制指令实现清刷运动;传感器系统收集各种信号并反馈给控制系统,通过修正控制指令使清刷机器人正常工作。
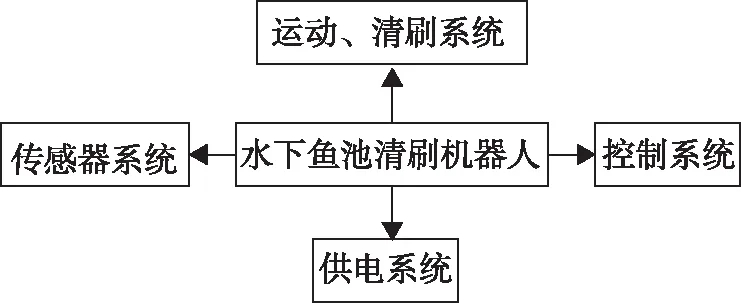
图1 清刷机器人系统组成Fig.1 Cleaning robot system
2 运动系统设计
2.1 系统布置
清刷机器人在水下运动时,驱动齿轮与履带啮合,带动导向轮转动,导向轮将履带不断地铺在地面上。履带和地面间存在较大的摩擦力,接触点与地面相对静止,可以使驱动轮不断带动机器人向前运动[11]。
O点是机器人在平地转向的瞬时圆弧的圆心,由于机器人自身宽度影响导致两条履带瞬时速度不同,只要满足两个驱动轮转向时差速行驶,即可实现转向,当内驱动轮静止外驱动轮转动,可以实现原地转向(图2)。
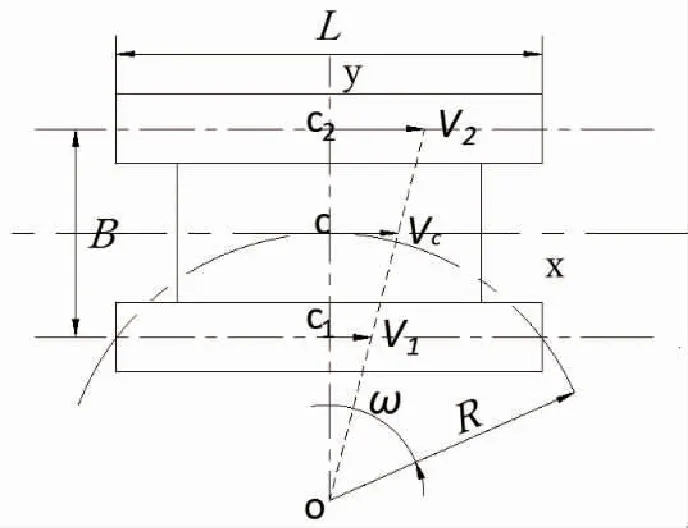
注:O点为履带转向瞬时圆心;R为转向瞬时半径,mm;ω为瞬时角速度,rad/s;B为小车的车宽,mm;L为履带的长度,mm;v1为履带C1的瞬时速度,m/s;v2为履带C2的瞬时速度,m/s;vc为小车C的瞬时速度,m/s。
图2履带转向示意图
Fig.2 Track steering diagram
2.2 受力分析与参数确定
水下鱼池清刷机器人所使用的小型履带行走装置,根据设计要求满足水下行走速度为0.2~0.6 m/s,最大爬坡角为5 °,爬坡速度为0.2~0.4 m/s。由电机负载力矩公式[12]:
(1)
电机转速公式[12]:
(2)
电机功率[12]:
(3)
式中:Tm—电机负载力矩,N·m;M—本体质量,kg;a—本体加速度,m/s2;g—重力加速度,m/s2;f—履带与地面摩擦系数;∂—爬坡角度;rs—驱动轮分度圆半径,m;i—总传动比;η—总传动效率;v—本体行驶速度,m/s。
3 清刷系统设计
3.1 刷头设计
刷头由刷盘和刷丝组成,为了减轻质量及减小转动惯量,刷盘采用轻质铝合金材料,直径200 mm;刷丝采用聚丙烯材质,通过编制固定在刷盘孔中,聚丙烯材料抗磨损性能好且耐腐蚀(图3)。
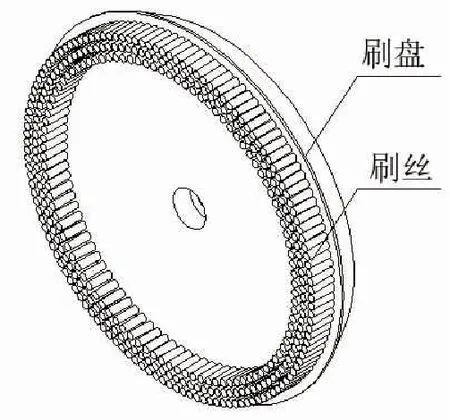
图3 刷头Fig.3 Brush head
3.2 旋转往复装置设计
旋转原理:电机通过联轴器与减速器输出轴连接,减速之后带动清刷机构的刷头旋转,实现旋转功能。往复原理:刷头在与地面接触的时候,弹簧在预紧力的作用下处于中位,传动轴带动传动杆做轴向运动,使弹簧进一步被压缩,从而使刷头沿着清刷面外法线方向运动[13]。旋转往复装置如图4所示。

图4 旋转往复机构Fig.4 Rotary reciprocating mechanism
3.3 受力分析与参数确定
盘形刷在鱼池底部清刷时所受的阻力矩包括水的粘滞阻力矩、盘形刷的摩擦阻力矩和惯性阻力矩。水的粘滞阻力矩Mv[14]:
(4)
式中:Mv—刷盘受到的粘滞阻力矩,Nm;ρ—水的密度,kg/m3;Rp—刷盘半径,m;v—运动粘度系数;ω—旋转角速度,rad/s。
盘形刷的摩擦阻力矩Mf[14]:

(5)
式中:Mf—刷盘所受的摩擦阻力矩,Nm;F1—刷盘对鱼池表面的正压力,N;f—刷丝与鱼池表面间的摩擦系数,f=0.6;Rb—刷丝分布半径,m;rb—刷盘无刷丝部分半径,m。
(6)
式中:MG—刷盘惯性阻力矩,Nm;J—刷盘转动惯量,kg·m2;ε—刷盘角加速度,r/s2;m—刷盘质量,kg;n—刷盘转速,r/s;t—刷盘加速时间,s。
盘形刷在水下清刷克服总力矩M为:
M=Mv+Mf+MG
(7)
盘形刷总功率P为:
P=Mω
(8)
式中:M—刷盘克服的总力矩,Nm;P—刷盘的总功率,W;ω为刷盘的角速度,rad/s。
4 控制系统设计
4.1 系统布置
清刷机器人的计算机软件系统、控制系统和供电系统都装在密封舱中,整个机器人系统部件都集成在机器人本体上。传感器系统将收集到的各种信号反馈给控制系统,控制系统再发出相应指令协调各系统正常工作。由于鱼池的规格和形状不同,因此机器人的路径规划采用直线栅格法,即机器人将所在位置沿直线栅格走一遍,当遇到障碍物后再沿固定方向旋转90°直至进入下一个直线中。图5是水下鱼池清刷机器人控制系统框图。

图5 系统控制框图Fig.5 System control block diagram
4.2 总体结构与布局
根据设计参数,利用三维软件构建鱼池清刷机器人总体结构。其中包括机器人本体、运动机构、清刷机构、密封舱等(图6),左图为主视图,右图为等轴侧视图。

图6 清刷机器人三维模型Fig.6 Cleaning robot 3D model
5 数学模型构建
5.1 坐标系建立
水下清刷机器人(简称ROV)本体在水下受到多种力和力矩的共同作用。为描述清刷机器人在其作用下的运动规律,必须建立合适的运动坐标系和运动参数,这是为水下清刷机器人控制系统的设计与分析提供基础。根据造船与轮机工程学会资料,建立描述水下清刷机器人运动的两种坐标系:固定坐标系E-ξζε和运动坐标系O-XYZ(图7)。在运动坐标系中ROV的运动可以表示成沿着三根坐标轴的移动和转动,即6个自由度的运动[15]。
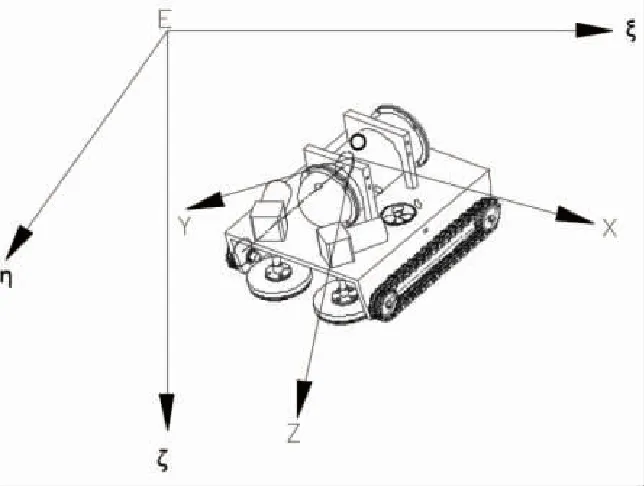
图7 清刷机器人坐标系Fig.7 Cleaning robot coordinate system
运动坐标系是随着机器人本体运动而运动的坐标系,运动坐标系原点O相对于固定坐标系的速度U在运动坐标系上的3个轴向分量依次为纵向速度u、横向速度v和垂向速度w;机器人绕坐标系原点O的角速度为Ω在坐标系上的3个轴向分量依次为横向角速度p、纵向角速度q和偏航角速度r;作用在机器人上的外力F在坐标系上面的分量依次为纵向力X、横向力Y和垂向力Z;外力F对坐标系原点O的力矩M的分量依次为横摇力矩K、俯仰力矩M和回转力矩N[16]。
5.2 ROV运动表达式
水下清刷机器人(ROV)在水下受到的合力(τ)用式(9)表示[17]:
τ=τc+τr+τd
(9)
式中:τc—机器人本体产生的力和力矩;τr—水动力学产生的力和力矩;τd—脐带缆等附加产生的力和力矩。
根据欧拉定律可推出ROV六自由度运动方程[18]:
m[v1+v2×v1+v2×rG+v2×(v2×rG)]=τ1
(10)
I0v2+v2×(I0v2)+mrG×(v1+v2×v1)=τ2
(11)
式中:m—本体质量;rG—本体重心与坐标系距离向量;I0—本体转动惯量矩阵;v1—速度向量;v2—角速度向量;τ1—力向量;τ2力矩向量。
ROV在水中运动时同时受到多个力和力矩的作用,主要包括水动力、静力、推力[19- 21]。
6 清刷机器人盘刷清扫性能试验
6.1 试验内容及方法
本试验在中国水产科学研究院渔业机械仪器研究所如东试验基地开展。试验用3口规格相同长2.4 m×宽2.4 m的平底方切角混凝土鱼池,池底清刷面积为5.4 m2。通过将临近养殖池底部悬浮物质量浓度较高的养殖水体(约100 mg/L)泵入实验池,平均水深30 cm。经过8 h的静置后,池底出现明显的污染物沉淀层,即开始带水清刷试验,清刷完毕之后再排空水,测量计算出未清刷面积。
图8所示为样机正在进行水下清刷试验,该试验仅在样机机座尺寸为长0.4 m×宽0.3 m×高0.15 m,刷盘直径120 mm的条件下进行清刷试验。该试验主要目的是探究前期设计的清刷机器人清刷路径是否合理,以及在该清刷路径下影响清刷性能的主要因素。

图8 样机水下清刷试验Fig.8 Prototype underwater cleaning test
根据前期预试验与电池工作时间,确定每组试验时间30 min。试验采用正交试验中的极差分析法,每组试验重复3次取平均值[22]。
本试验不考虑刷盘直径大小、刷毛材料以及接地压力等对清刷效率的影响,只分析刷盘转速和清刷速度两个因素对清刷效率的影响。
6.2 结果与分析
从表1可以看出,刷盘转速是主要影响因素,在该清刷路径下其最优方案为B3A2,即刷盘转速600 r/min,驱动速度0.4 m/s,此为清刷效率最高的组合方案。

表1 正交试验设计及结果Tab.1 Orthogonal experimental design and results
注:A表示驱动速度,A2表示驱动速度为0.4 m/s;B表示刷盘转速,B3表示刷盘转速为600 r/min
这是因为提高刷盘转速可以提高刷盘接地点的绝对速度,从而减小漏扫区域;而提高驱动速度,盘刷清刷轨迹宽度变大,导致漏扫区域增大。由于在该试验中仅考虑驱动速度和刷盘转速对清刷性能的影响,刷盘直径、刷毛材料、接地压力以及清刷路径都可能对试验结果造成影响,因此在后期试验中需要综合考虑各个因素对清刷性能的影响。
7 结论
本研究从工厂化水产养殖鱼池清刷需求出发,通过分析现有水下清刷装备,研究设计水下鱼池清刷装置,分析并计算出各系统结构分布及相关结构参数,将直线栅格算法运用到清刷机器人的清刷路径。利用三维软件建立清刷机器人三维模型,根据参数要求组装试验样机。通过对样机进行试验分析,得出刷盘转速是影响清刷机器人清刷性能的主要因素。本水下鱼池清刷机器人现阶段的研究只要求清刷池底,在后期研究中要结合池壁清刷、水下监视和水质检测等;同时现阶段清刷试验只考虑了栅格算法的路径规划,后期将会结合其他路径算法,得出最优的清刷路径,以达到最优的清刷效率。
猜你喜欢
垂钓(2022年10期)2022-10-12
小学生学习指导(中年级)(2021年10期)2021-11-01
兵器装备工程学报(2021年3期)2021-04-09
哈哈画报(2021年10期)2021-02-28
小型微型计算机系统(2019年6期)2019-06-06
科学中国人(2016年24期)2016-07-14
儿童故事画报·智力大王(2016年5期)2016-07-04
科技视界(2014年6期)2014-12-24
图书与情报(2013年1期)2013-11-16
卷宗(2013年6期)2013-10-21
