直立式护岸渡槽船行波分布规律研究
2020-01-01 02:34翟正娟
水科学与工程技术 2019年6期
翟正娟
(苏交科集团股份有限公司,南京210019)
1 前言
我国内河航运呈显著的船舶大型化、 通过频率密集化发展,这导致船行波问题日益严重[1-3]。 尤其在部分束窄河段 (如渡槽、 船闸引航道、 天然束窄段),船行波引起的水流紊乱问题尤为明显。 规模较大的船行波将产生船首偏角影响过往船舶正常行驶、恶化航道两岸码头待泊船舶泊稳,甚至产生掏刷水流,破坏两侧护岸的稳定性。
针对船行波的研究最早起于18世纪末,在Kelvin认为船在行驶过程中会产生横波和散波两种波形,两种频率的波相互叠加的峰值点为歧点,经分析及实践验证,歧点的连线为直线(成为歧线),且歧线与船舶行驶路径之间的角度成为开尔文角,且为相对固定值(19°~22°)[4]。 开尔文角示意如图1。
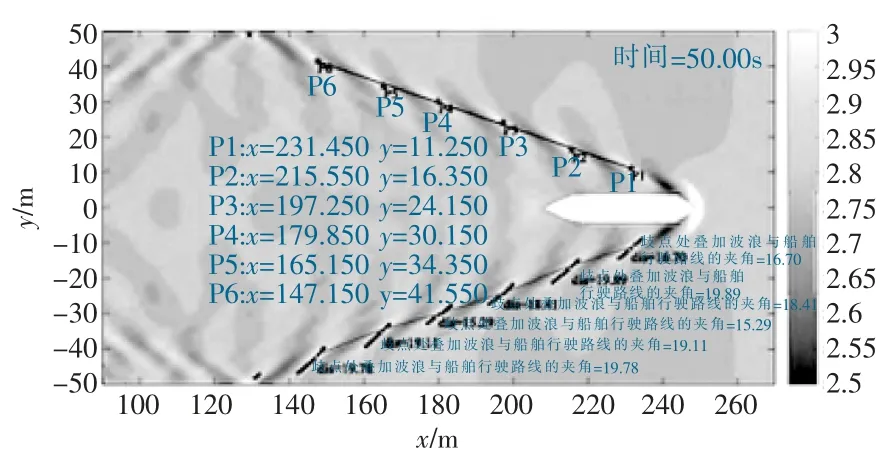
图1 开尔文角示意
Wilson通过对巴拿马12种船型大量行驶波浪数据统计,认为船行波在平面传播、分布上具有典型的二维性质,而最大波高随时间一直波动,在空间上又具有明显的三维性质[5-6]。 Raven将叠加波浪的最大波高定义为一个波浪序列中,相邻波峰和波谷之间的最大高程差,将波峰和波谷之间的时间历程定义为半个周期[7]。 船行波波高时间序列过程如图2。
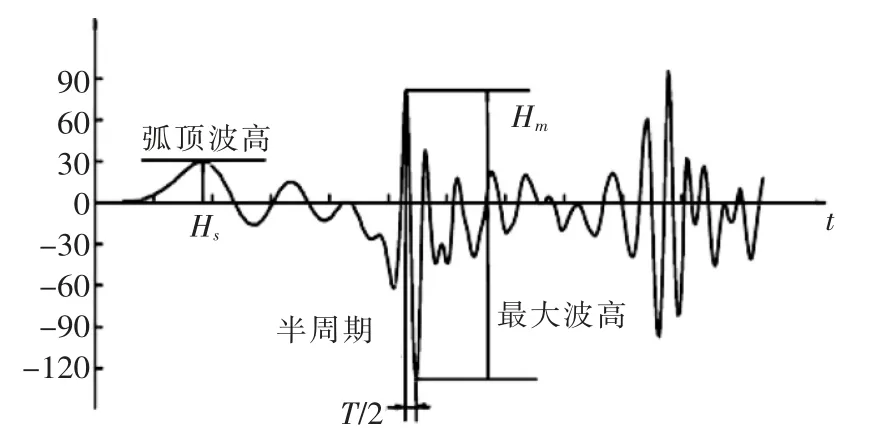
图2 船行波时间序列
王田艺认为,在直立式护岸区域,船行波受直立式岸墙反射影响,相互干扰、叠加,船行波规模远大于自然岸坡和斜坡式护岸[8-10]。
2 工程概况
工程隶属滨海枢纽工程,位于滨海县城南6km、入海水道与连申线交汇处。 滨海枢纽二期渡槽位于江苏省盐城市连申线(即通榆河)上,为给渡槽的入海水道泄洪通道创造条件,渡槽采用直立式挡墙结构,且航宽由现状的90m束窄为71m。二期地涵建于一期地涵北侧200m处,地涵长293.4m,口宽71m,航宽70.42m,与一期地涵连接段斜坡坡率为1∶12。 滨海枢纽二期地涵平面布置如图3,立面布置如图4。 工程段连申线最高通航水位2.24m,最低通航水位-0.37m,渡槽设计底高程3.67m。

图3 滨海枢纽二期渡槽平面布置
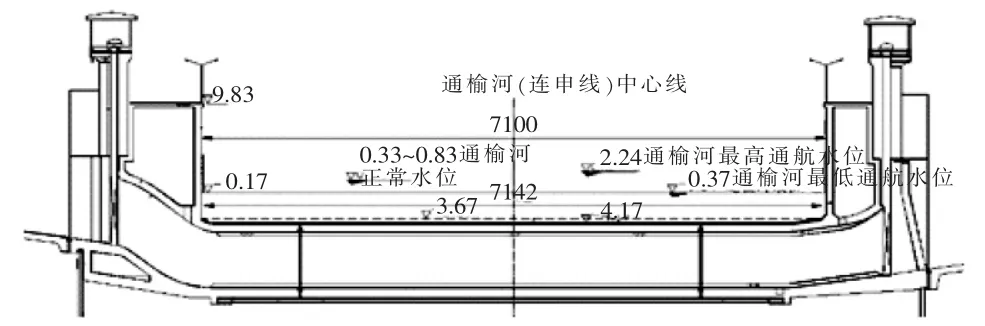
图4 滨海枢纽二期渡槽立面布置
3 三维模型建立
本文采用三维数值仿真模拟方法,探究直立式护岸下渡槽内船舶船行波分布规律。
3.1 船型选择及船舶模型建立
连申线航道规划等级为Ⅲ级航道,根据GB50139—2014《内河通航标准》及《京杭运河、淮河水系过闸运输船舶标准船型主尺度系列》,取1000t级货船为代表船型,设计尺度为58m×11.0m×3.1m(船长×宽×吃水)。 船舶模型如图5。

图5 设计代表船型概化
3.2 渡槽三维模型及计算工况
二期渡槽长293.4m,宽71m。 渡槽段三维模型及网格划分如图6。其中,模型采用立方体网格,网格间距设为2m,整个模型共有10402个网格和20605个网格节点。 本模型中船舶距离岸壁距离为1m。
选择最高通航水位作为计算工况,该工况下,河段水流自北向南,流量250m3/s,水位2.41m。

图6 二期渡槽三维模型网格划分
4 三维模型计算结果
4.1 船行波发展过程
设计代表船型进入渡槽后,船行波发展、传播过程如图7。

图7 1000t级货船渡槽中船行波发展过程
分析可知:
(1)在船舶前进过程中,船首部分挤压、推排船前水体,形成弧形壅水,并沿着开尔文角度方向相对船体向斜后方运动。
(2)船行波波峰出现在船首正前方区域,在向斜后方运动过程中按照间谐波的规律依次震荡,波峰、波谷交替出现的规律十分明显。 证明船行波具有显著的二维、三维性质。
(3)船行波在前4个周期中,与岸壁之间基本无相互干扰作用。 从第5个周期开始,船行波受岸壁的反射波作用影响,波峰线逐渐缩短,且波纹开始紊乱,与反射波的相互干扰作用逐渐明显。
(4)经对比,船首行波的规模、波高都显著大于船尾行波。 产生原因主要是船舶在船首推排水体形成波浪并逐渐传播,在传播过程中波浪能量逐渐消减,且波浪干涉、衍射作用也在一定程度上消减了波浪能量,减小了波浪规模。
4.2 不同吃水对船行波的影响
在船舶航速为5.0m/s 下,设置吃水分别为0.75,1.0,1.25,1.5m 4组对比工况。 船舶吃水模型设置如图8,各工况下在行驶45s时的船行波分布如图9。
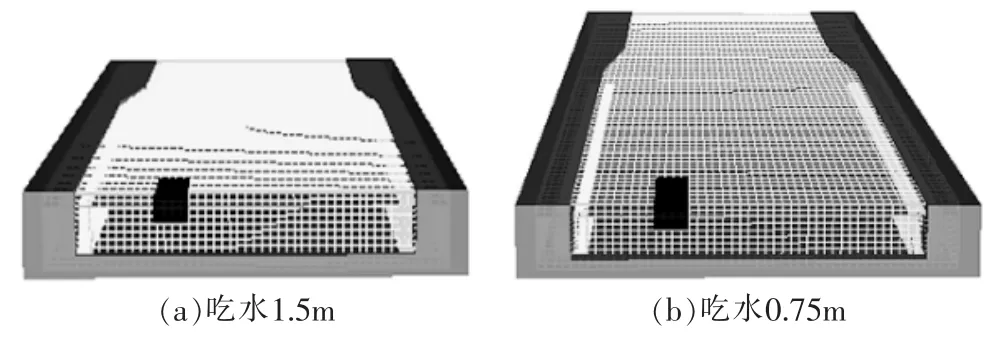
图8 不同吃水工况下模型

图9 不同吃水工况下船行波分布
分析可知:
(1)随着船舶吃水深度增加,船舶推开船前水体增大,船首壅水范围及船行波规模也单调递增。
(2)随着船舶吃水深度增加,波浪震荡幅度越大,相应地波谷高程也越低。
(3)在4组工况下,波浪周期及波浪长度基本一致。 可见不同吃水深度对船行波的波浪周期及波浪长度基本无影响。
(4)4组工况下,开尔文角的计算值在19.11°~21.94°之间,均在理论值范围内,可见从开尔文角的合理性方面,模型计算结果较为精确。
4.3 不同航速对船行波的影响
设置两组对比试验分析不同航速对船行波影响,即吃水深度在0.9m时,航速分别为5.20,5.70m/s时对船行波分布影响,以及吃水深度在1.40m时,航速分别为5.20,5.70m/s时对船行波分布影响。 计算结果如图10,图11。

图10 吃水深度0.9m船行波分布
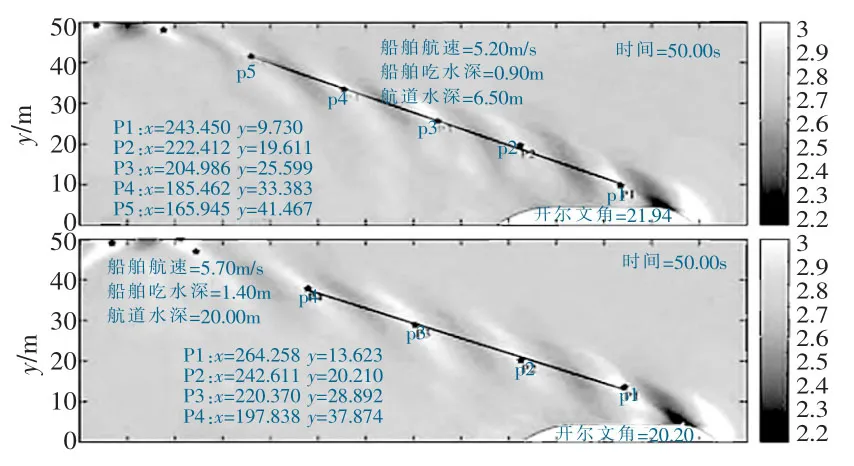
图11 吃水深度1.4m船行波分布
分析可知:
(1)在不同航速下,船行波分布形态略有区别。随着航速增大,在相同面积的范围内,歧点间距增大,数量减少。
(2)分析可知,船行波的波长与航速呈正比,随着航速增大,波长也随之增大。
(3)4组工况下,开尔文角的计算值在20.20°~21.94°之间,均在理论值范围内,可见从开尔文角的合理性方面,模型计算结果较为精确。
5 工程波高拟合计算
本文根据仿真试验计算的262 组数据,对J12229—2012《内河航道工程设计规范》附录C中的波高计算公式进行回归分析,迭代求解相关系数。计算如式(1):

式中 Hc为船行波等效波高(m);h为渡槽水深(m);S0为船舶航迹线与直立式岸壁的距离 (m);B为船舶宽度(m);V为船舶航速(m/s);g为重力加速度(m/s2);d为船舶吃水深度(m);α,β1,β2,β3均为待定求解系数。
对式(1)进行待定系数求解,得到滨海枢纽二期渡槽波高,如式(2):

根据仿真试验计算262组数据,由式(2)与数值模拟计算值进行对比分析,其中部分计算点(图12中列出了86个计算点的精度分析情况)拟合公式波高计算结果精度如图12。

图12 拟合波高计算结果
分析可知,262组数据中,最大计算误差0.32m,最小计算误差0.00m,平均计算误差0.03m;计算误差比小于10%的数据共有227组,占全部样本的86.6%,计算误差比小于15%的数据共有240组,占全部样本的91.6%;三维数模计算值与拟合公式计算值的相关系数达0.963;可见采用回归分析拟合计算公式预测精度较高,能很好地反映实例工程的波高情况。
6 结语
(1)船行波波峰出现在船首正前方区域,在向斜后方运动过程中按照间谐波的规律依次震荡,波峰、波谷交替出现的规律十分明显。 可见船行波具有显著的二维、三维性质。
(2)船舶吃水深度增加,船舶推开船前水体增大,船首壅水范围、船行波规模也单调增大。 同时吃水深度对波浪周期及波浪长度基本无影响。
(3)船行波的波长与航速呈正比,歧点数量与航速呈反比。
(4)采用回归分析方法,验证了规范波高计算公式中的系数取值,得到了滨海枢纽二期渡槽船行波波高计算公式,且经验证,拟合公式计算精度较高,能很好地反映实例工程波高分布情况。
(5)针对船舶与岸壁距离、船型尺度、船型交汇情况、其他护岸型式对船行波的影响,有待进一步分析研究。
猜你喜欢
建材发展导向(2022年24期)2022-12-22
海洋工程(2021年5期)2021-10-27
海洋通报(2021年3期)2021-08-14
中华建设(2020年5期)2020-07-24
——以东风渠天宫桥渡槽和黎家沟渡槽为例
水利与建筑工程学报(2020年2期)2020-05-31
水利规划与设计(2020年1期)2020-05-25
土木建筑与环境工程(2019年6期)2019-02-02
中国军转民(2017年9期)2017-12-19
舰船科学技术(2016年1期)2016-02-27
中国船检(2012年1期)2012-08-04