无人机影像应急处理技术在尼泊尔地震中的应用
2019-12-30 08:46:52姚富山韩瑞丹
中州建设 2019年3期
姚富山 韩瑞丹
(河南建筑职业技术学院,河南郑州 450064)
引言
重大自然灾害往往造成灾区通讯中断和道路交通破坏,因此获取灾情成为自然灾害抢险救灾的首要问题。无人机以其机动、快速、经济等优势,在灾害应急领域的应用日益突出。但受自身条件限制,无人机影像数据存在畸变大、姿态差等问题,若使用传统的航空摄影测量理论和技术[1]进行应急情况下的处理,耗时长效率低难以满足时效性要求。而SfM[2](Structure form Motion)算法利用立体测量的基本原理,从静态序列图像中提取目标物的三维坐标进行场景重构,对相机的拍摄位置、摄影焦距没有特殊要求且无需给定初始值和控制点数据,因此利用简单的无人机测量平台采集地面的影像就能获取灾区高质量的三维地形数据。
本文以2015年尼泊尔樟木震区无人机影像为例,使用SfM算法通过特征提取,影像匹配及三维重建得到震区点云数据,将点云滤波并构网得到相对精确的数字高程模型(DEM),并通过数字校正得到灾区的正射影像(DOM)。基于上述数据进行水文分析、地质灾害点提取及灾区影像解译等工作,以为灾情调查、灾害损失快速评估及制定救灾决策提供有益借鉴。
1 基于SfM算法的重建流程
基于SfM重建流程主要包括三个步骤,首先提取影像特征点,然后进行影像的匹配,最后利用SfM算法进行运动与结构重建。
1.1 基于辅助信息和分块特征提取
特征点提取的方法有Harris角点、SIFT和SURF等[3],在宽基线条件下SIFT算子在旋转、尺度缩放、光照不变和高斯模糊等衡量参数上优点明显[4],且具有很好的鲁棒性。但SIFT算法主要针对低分辨、小像幅的影像,在处理高分辨率无人机影像时易出现内存溢出等问题,为此可以将原始影像分成大小均等的子块且保证相邻子快之间有一定的重叠,然后在每一子块上建立尺度空间,检测极值点,提取特征点;最后合并子块,将特征点位置转换到原始影像上。
而且在得知无人机GPS和IMU数据得到粗略的位置、姿态信息的情况下,可以获取每幅影像近似的投影矩阵信息[5]。利用这些辅助信息将无人机影像的四个图像角点投影到与地面平行且GPS高程值最大的平面,判断投影四边形区域是否有重叠,如果有就认为相邻的两幅影像(记为i,j图像)具有匹配关系,并将
1.2 影像匹配
图1 特征点提取
在确定了影像特征点的位置并建立局部特征描述子后,可采用特征向量的欧式距离作为特征点的相似性度量,从而建立各影像间的关联关系。首先基于K-D树的近似最近邻( Approximate Nearest Neighbors,ANN)算法进行影像粗匹配,再将随机抽取一致性(Random Sample Consensus,RANASC)策 略和8点算法[6]相结合,估计一个鲁棒性的基本矩阵,从而进一步剔除误匹配点,最终得到满足对极集合约束关系的匹配特征点对。设参与匹配的所有影像中,影像的最大关联影像数为k,则影像匹配算法的时间复杂度为O(n),公式化表达为:
其中,n 为重建影像总数;k为所有重建影像中影像的最大拓扑关联数( k<n)。

图2 影像几何连接图
本文根据无人机影像间的关联关系建立高度簇聚集的影像几何连接图(如图2所示),其中蓝点表示特征点,直线连接表示影像间的关联。
1.3 运动与结构重建

其中,n为影像总数;t为精匹配特征点个数;若点f在影像i上,为点 f在相机i投影面上的投影误差。
本文参照Bundler开源软件包,基于Levenberg-Marquardt(LM)算法的通用稀疏光束法平差(Sparse Bundler Adjustment)法[7],通 过 逐步迭代不断的减小投影点与观测图像点之间的重投影误差,最终结算出相机的位置、姿态及精匹配特征点的三维坐标(图3所示)。

图3 匹配稀疏点云
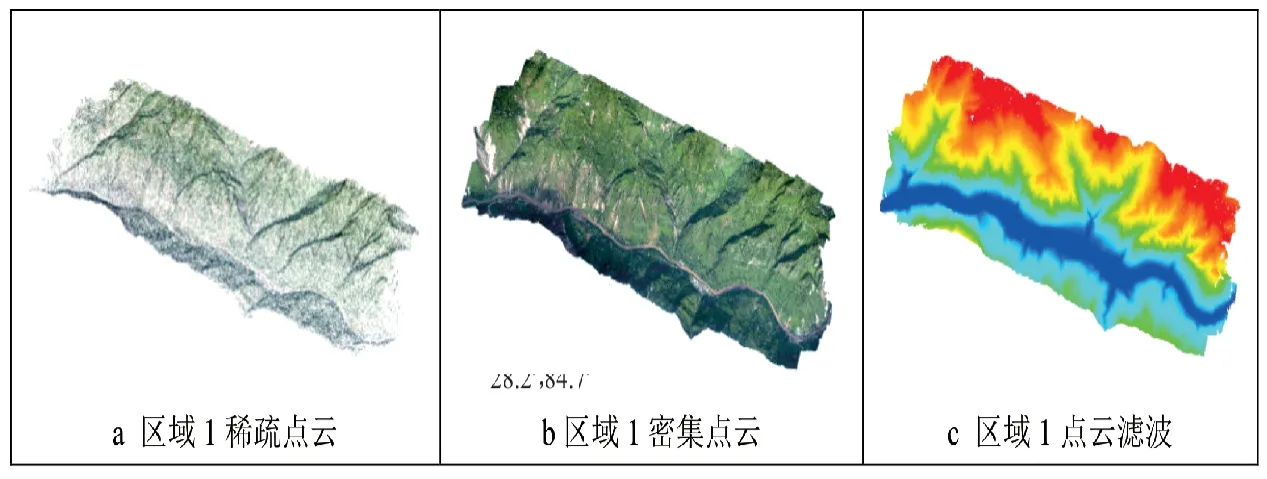
图4 测区生成的点云
2 尼泊尔地震灾区重建应用
2.1 震区数据介绍
2015年4月25日,尼泊尔发生Ms 8.1级地震,震源深度20 km。地震引起的山体滑坡造成中尼聂拉木至樟木段部分公路阻断,4月30日有关部门联合北京安翔动力科技公司利用固定翼无人机对中尼边境樟木段灾区进行航拍,以为道路疏通及灾后救援做准备工作。作业时3级微风、多云,飞行稳定,平均相对航高450m,传感器为SONY DSC-RX1数码相机,焦距35mm,共6条航带,拍摄3587张影像,影像大小为6000像素 4000像素,航向重叠预设为80%,旁向重叠预设为60%。选取其中典型的一块区域共420张影像作为实验数据影像。
2.2 震区数据处理与重建
本文结合上述理论,利用SfM通过运动结构重建获得了实验测区的稀疏的三维点云(图4(a)),通过稠密化扩散算法[8],最终生成密度为20个/ ~40个/ 的密集点云(图4(b))。为了得到相对精确的DEM数据,本文利用Terrasolid软件,其采用渐进不规则三角网加密算法对密集点云进行滤波,从图4(c)中可以看出经过滤波去除了大部分人工建筑物并且保留了道路等重要地物,但在陡坡上一些植被受坡度的影像被错分为人工地物,造成了一些点云漏洞需人工进行修补。
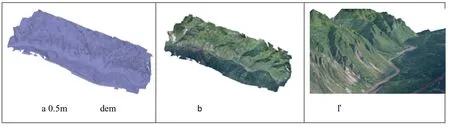
图5 两块测区DEM及正射图
3 震灾区重建应用分析
将DEM建立的真实地形表面模型与DOM以及衍生的数据叠加生成三维地形影像,在计算机三维可视化技术的辅助下进行地形、水文和三维等分析,以在较短的时间内对受灾情况进行模拟,及时准确的掌握灾区真实情况,从而为防灾、减灾以及救灾工作提供可靠地依据。

图6 水文提取流程图
3.1 水文分析
流域信息是进行水文模拟的必要信息,也是相关部门结合气象、植被分布等方面的资料进行防灾减灾的重要前提。图6为基于ArcHydro水文分析工具从DEM数据中提取水文信息的流程图[10]:
将得到的DEM数据经过上述步骤处理之后,把提取的水系网络、汇水流域及出水口数据与三维地形和影像进行叠合以真实模拟当地的水文网络分布及其特征,其中红色曲线为该区干流,蓝色为支流,黄色圆点为流域的出水口,不同颜色的面状区域则代表了不同的汇流区域。从图7(a)中可以直观清晰的识别该区域河流的主支流分布、河网的密度及流向等水文特征;7(b)是在左图的基础上叠加了汇水流域数据,不同的颜色代表不同的汇水流域,颜色分布越广则说明该流域的集水能力越强,相同降水条件下河网获得的雨水越多,径流越大;黄色圆点则是该区域最终的出水口点,也是该区域径流量最大的地方;图7(c)是该区域洪水淹没模拟图,根据预测降水量模拟山洪水位,以直观的获取淹没范围同时对灾害作出评估。
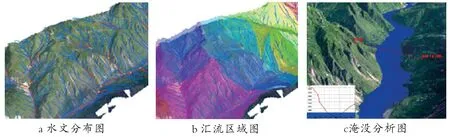
图7 区域2水文分布
3.2 地质隐患提取及灾害评估
实验区域地势陡峻,沟壑密布,河流的冲刷切割作用强烈,因而会形成众多的具有足够滑动空间的斜坡体和切割面,受地形地貌、水文地质等条件的影响,极易在坡度10到45度的上陡下缓地区堆积较厚的松散层形成滑坡等地质灾害。
图8是利用eCognition软件使用面向对象的思想对实验区域一块子区域进行影像解译分类的结果图,其中绿色区域为植被区,蓝色区域为居民区,白色区域为道路,黄色区域为地质隐患区域,红色区域为滑坡区域。从光谱信息上看道路、房屋及岩土裸露的区域亮度高,而植被覆盖区域亮度低;从坡度信息上看,坡度陡的区域易发生灾害,坡度平缓的地区不易发生灾害。因此把亮度较小的区域分为植被覆盖区,把亮度较高而且长宽比较大的区域分类为道路区,坡度大且植被覆盖少的区域分为地质隐患区域,把坡度较大无植被覆盖的高亮区域分为滑坡区。
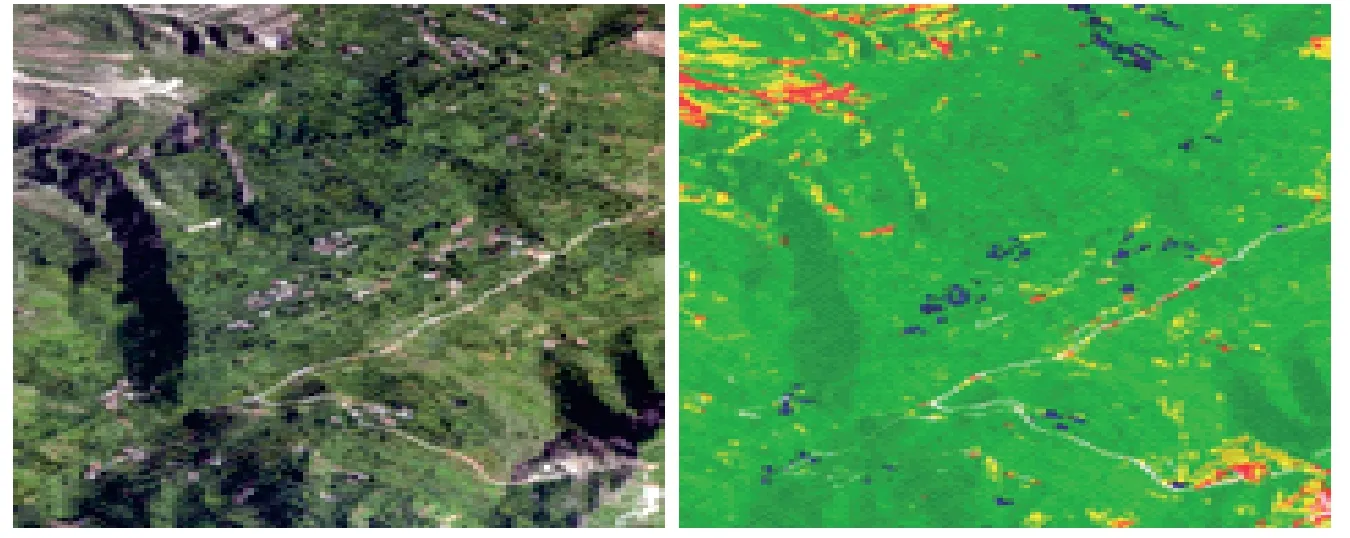
图8 解译分类图
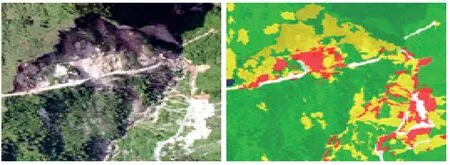
图9 滑坡掩埋公路
经统计,该子区域滑坡区域像元总个数为199955个,面积约为2000;地质隐患区域像元总个数为87536个,面积约为880 ;滑坡掩埋公路区域(如图9所示)总像元个数为15631个,面积约170,滑坡体的土方量约为3970,这为道路疏通工作提供了有力参考。从统计数据中可以看出该子区域滑坡主要发生在无人区,对道路的影响比较小;人们应当重点关注道路及居民区附近的地质隐患区域,防患于未然。
结论
本文基于SfM算法,提取震区无人机影像的特征点并进行影像匹配,通过运动与结构重建恢复震区三维点云。并通过滤波、构网和正射纠正得到震区DEM和DOM数据。最后,将无人机影像衍生的数据进行融合实现对受灾地区的三维重建,并通过仿真模拟为防灾、减灾和灾害评估工作提供了可行性的理论方案。事实表明基于SfM的无人机影像后处理方法对受灾区域进行精确三维描述是切实可行并具有现实意义的,当然,如何在现有的硬件条件基础上,近一步提高数据处理的效率和精度,减小无人机姿态的不利影响等方面,还需要进行更加深入的研究。
猜你喜欢
水资源开发与管理(2023年8期)2023-09-08 13:27:10
数学大王·趣味逻辑(2022年5期)2022-05-22 23:07:52
加油站服务指南(2021年8期)2021-11-04 08:18:58
中国石油石化(2021年16期)2021-10-14 08:59:16
河南水利年鉴(2020年0期)2020-06-09 05:43:48
河南水利年鉴(2020年0期)2020-06-09 05:43:30
四川地质学报(2017年1期)2017-06-15 20:28:58
河南水利年鉴(2017年0期)2017-05-19 02:29:33
城市道桥与防洪(2014年6期)2014-02-27 07:27:02
四川党的建设(2009年6期)2009-08-04 09:37:12