智能制造背景下大学时期自动化智能化 设备开发的培养探索
2019-12-26 07:57杨氟杨康民
智能建筑与智慧城市 2019年12期
杨氟,杨康民
YANG Fu1, YANG Kang-min2
(1.户县嘉泓机械设备有限公司;2.陕西鑫盛强园林建设有限公司)
(1.Huxian Jiahong Machinery Equipment Co., Ltd.;2.Shaanxi Xinshengqiang Garden Construction Co., Ltd.)
1 引言
我国智能制造业发展的速度相当惊人,而高技术人才却严重缺乏。与其它国家相比我国高级技师和技师占技能劳动者的比重仅为1.5%,而发达国家占到了35%,2020年我国技能劳动者需求将比2009年增加3290万[1-2]。《中国制造2025》战略,由李克强总理从2015年3月提出到2015年5月8日正式颁布以来,其主旨在于围绕创新驱动、智能转型、绿色发展人才为本,信息技术与制造技术深度融合,将我国从制造大国转换成制造强国;其目的在于主攻智能制造业[3]。随着我国经济的发展,人们对物质需求的种类也越来越多,各领域制造行业的人工成本也越来越高,导致东南沿海地区的好多公司将厂区移至他国。面对这种实际存在的问题,我们必须改变生产方式,改变传统的工作模式,改变当今大学生的知识构架体系,加快培养智能制造人才,让中国制造进入一个新的时代[4-8]。但是改变大学生教育体系,还需要一段时间,毕竟需要投入很大的财力物力。根据笔者一些经历,总结一点智能制造设备开发的经验,让毕业生想就业于智能制造设备开发行业的在校大学生,结合自己的专业和学校现有的资源打下结实的基础,以备日后工作之需。
2 知识构成特点
当今世界更需要的是综合人才,尤其是产品研发人员必须具备更全面的知识储备,才能适应当今世界的飞速发展。智能制造是一种多学科集成在一起的复杂制造方式,这种跨学科的智能制造行业所需要的专业知识分散在大学不同的专业中[9]。如机械设计方面的知识是机电学院的机械设计制造及其自动化专业知识;电器设计方面的知识是机电学院的电器自动化专业知识;上位机开发,软件开发,Mes系统方面的知识是软件学院的软件工程专业知识;运动控制,视觉方面的知识是机器人学院的机器人驱动专业和机器人感知专业;物流仓储管理的知识是物流学院的物流管理专业。接下来笔者将从以下几个方面重点说明。
2.1 机械方面
机械部分相当于人体的骨骼框架。机械方面在工作中主要包括:最基本的机械3D结构设计、机构设计、2D加工图设计(包括选材和材料表面处理等)、机械配件选型、气动配件选型、气路图设计、装配图设计等。机械部分是必须的基础,即使有再好的软件和控制系统没有优秀的机械结构与之匹配那么对于整个项目来说也是达不到整体的预期效果。一台优秀的设备或者产线,其结构紧促,运行可观,结构美观,妙不可言。
2.2 电气方面
电气部分相当于人体的血液系统。电气方面在工作中主要包括:电路图的设计,电气元器件的选型、电气实物的布线等。电气部分是机械运动的重要条件,电气通过机械结构布局设计电器元器件的安装位置,再经过合适的布线安装为控制单元和机械执行结构单元之间架起沟通的桥梁。气动方面的选型,一般都是由机械工程师完成。
2.3 运动控制方面、PLC、板卡开发
运动控制部分相当于人体的心脏,去控制运动系统运动。从应用角度看,一般常用的主控方面主要包括:PLC控制,运动控制卡控制等。其中PLC在学校学习时,若是一名电气相关专业的学生,应该主要在梯形图的编写上多下功夫,梯形图比较简单且比较直观,电气专业相关的学生选择PLC作为主控是比较合适的;如果是一名软件相关专业的学生选择运动控制卡作为主控是比较合适。在校期间应该多练习一下面向对象的编程,至于学习哪种语言比较好? c++或C#就可以了,或者是其他高级语言也可以,根据自己的喜好选择一门好好研究即可。如果有时间学习学习其他语言那就更好了。
2.4 软件方面
软件部分相当于人的大脑,输入数据,再将数据处理之后输出。软件方面在工作中主要是上位机的开发,通过上位机去控制整个生产线或者其中一台设备。开发完成后再将其发布成可安装软件供客户使用。同学们在校期间可以学习一些高级语言,如:c++,c#,Java等。将一门研究透彻即可,若果有时间多研究一些其他高级语言那是更好了。对于这些高级语言的研究内容,个人建议主攻:文件的写入、写出,TCP通讯、串口通信和数据库方面的研究,选择其中一套方式进行透彻研究即可。数据库有很多种类。比如:SQL Server、mySQL、Oracle等。个人较喜欢用SQL Server。
2.5 机器人方面
机器人部分相当于人的手臂。在机器人应用方面主要包括两个方面:
1)机器人单纯走点位搬运
在一些领域中,由于环境或者效率的问题,机器人代替了人工,将一个产品从这个地方搬运到另一个地方,就只做一个简单的点位取放动作。
2)机器人与其他控制器协同工作
在另一些领域中,由于产品的工艺要求,机器人需要和其他控制器之间相互通讯来完成一些连续、反馈的动作。比如,机器人和PLC或者视觉通过串口通讯,或者通过TCP协议通讯来达到工艺要求。机器人又是如何被控制的呢?从应用层面来讲,他是通过相应的运动控制函数或者说是机器人语言来控制机器人本体的动作和其他控制器的相互通讯。对于在校的同学来说,自己可以根据自己的知识选择一款或者几款不同品牌的机器人,认真研读其说明书,学习相应机器人硬件的连接和软件方面的语言编程。有条件的,可以去其公司学习,申请编程实操练习。
2.6 视觉方面
机器人视觉部分相当于人的眼睛,将拍摄的照片通过视觉的一系列算法,算出结果,从而输出给机器人控制器去控制机器人运动或者输出给其他控制器,去控制相应的机构去动作。如果设备不复杂,那么视觉可以单独在工控机中做一个小软件与机构配合工作。如果设备较复杂,那么视觉部分可以写在上位机软件里,搭建好框架和通讯方式,与机构配合工作。对于视觉开发这块主要以C++,C#等语言为主。在校的同学可以根据自己的喜好选择一种高级语言认真学习研究;另外可以学习学习OpenCV开源视觉库,了解了解HALCON、VisionPro等视觉软件,通过这些学习可以对自己视觉算法的研究和视觉的应用起到一定的帮助作用。
2.7 Mes方面
MES(Manufacturing Execution System)即制造企业生产过程执行系统,是一套面向制造企业车间执行层的生产信息化管理系统[10-12]。这种MES系统一般在有生产的企业中是必不可少的。对于那些想毕业后从事这种系统开发的在校同学来说,在校期间主要好好研究一下C++,C#等高级语言以及和他们相关的通讯和数据库。学完之后可以根据自己的实际情况试着做一个小小的系统来巩固和训练自己所学的相关知识。
3 知识组成
3.1 知识框架
一台自动化智能化设备或者一条自动化智能化生产线,所需要的集成领域与分布关系,如图1所示。一台完整的自动化智能化设备或产线,在工作时,他内部的各个领域之间的相互关系:上位机软件会将客户输入的参数或数据传送到控制部分里面的PLC、运动控制卡、RB控制器或者其他的控制部分。然后,控制部分通过各种方法或者高级算法得出一个信号给电器元器件,通过串口、TCP或者其他的通讯方式去控制机构工作、RB工作、相机工作或者其他执行元件工作,最终完成设备或生产线所要达到的最终目的。在此生产期间,所有检测数据,生产数据,设备内部各种重要零部件的数据都会根据客户需求,通过MES系统,将其数据实时传送至看板和数据库,为企业家做出某种重要决策的依据,为维修师父对设备或生产线的保养计划提供科学依据等。
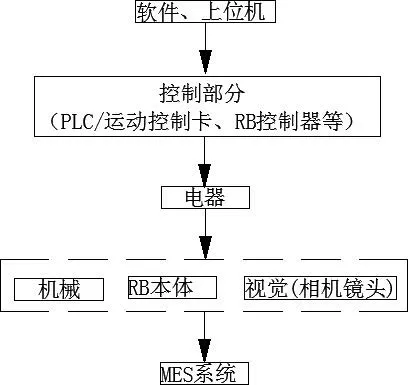
图1 集成领域与分布图
3.2 成功事例
通过对以上领域知识的练习、掌握,设计出了许多智能设备和智能产线。并且通过调试,他们都能够成功达到预期的功效。以下有几款重要的成功案例示意图。图2为智能插件机。该设备涉及到:上位机,机器人,视觉,PLC等领域知识;图3为汽车旋转开关产线。该生产线涉及到:机器人,视觉,PLC,总线等领域知识;图4是汽车撑杆产线。该生产线涉及到:机器人,运动控制卡,总线等领域知识。

图2 智能插件机图

图3 汽车旋转开关产线图

图4 汽车撑杆产线图
4 总结与展望
运用这套知识框架体系可以满足大众需求。如果想要做出自动化、智能化更高的设备或者生产线且成本较低的工程,那我们还有一定的提升空间。
下一步可以研究一下这样的知识框架体系,如图5所示。运用软件运动控制和EtherCAT实时总线,结合一体化软件控制算法,利用强大的Intel多核CPU运算能力,去控制机械机构、RB本体、相机等执行部分工作,从而达到完成项目预定的目标任务。这样的方式可以大大降低成本,并且让设备或者生产线的智能化程度更高。

图5 知识框架体系图
猜你喜欢
英语文摘(2021年10期)2021-11-22
摄影之友(影像视觉)(2019年3期)2019-03-30
文苑(2018年23期)2018-12-14
文苑(2018年19期)2018-11-09
文苑(2018年17期)2018-11-09
文苑(2018年21期)2018-11-09
CHIP新电脑(2015年10期)2015-10-15
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07