基于贝叶斯的多功能雷达脉冲列变化点检测
2019-12-26 01:39方旖陈秋菊潘继飞毕大平
指挥与控制学报 2019年4期
方旖 陈秋菊,2 潘继飞,2 毕大平
多功能相控阵雷达(Multi-Function Phased Array Radar,MPAR)是指具有序贯地执行大量不同任务的能力,支持多种功能的相控阵雷达系统[1].若想实现更理想的雷达对抗效果,就要求电子情报装备也必须具备认知的能力,即可以推断和辨识雷达当前的状态,并预判雷达未来的行动.对功能性脉冲组序列进行分析可以描述多功能相控阵雷达在当前任务(状态)下的脉冲特点,把行为辨识过程完整化,提供了多种辅助信息和前提条件,有利于提高识别的准确性.因此,对雷达脉冲序列基于变化点检测进行脉冲划分,截获有用信息成为关键.
为对雷达行为进行特性表征,并在此基础上进行脉冲划分,传统的方法多是提取特征参数,主要是通过获取脉冲描述字来实现的.文献[2]基于脉冲描述字(Pulse Description Word,PDW)对雷达情报进行处理,通过构建PDW 情报数据库,对PDW 信息进行深度挖掘,利用聚类算法和数据重演技术分析雷达脉冲序列,形成情报数据,调节参数完善情报数据库,形成完整的基于PDW 的情报处理和训练系统.文献[3] 建立了基于PDW 的对比函数,对雷达信号开展盲分选.文献[4]利用事件驱动的方法对PDW 进行量化编码,计算事件概率,提取相应的雷达脉冲序列片段,包含了此类事件的所有信息,相当于将接收到的雷达脉冲序列基于当前雷达状态进行划分.传统的提取脉冲描述字的关键信息的方法无法适应当前雷达复杂多变的调制样式和实时更新的波形,很难达到划分效果.
若要将划分后的雷达脉冲序列和雷达行为状态建立映射关系,则需要提取的雷达特征参数能够表现雷达行为变化规律[5-9].其中,文献[6] 提出利用脉冲重复间隔(Pulse Repetition Interval,PRI)动态提取信号特征并进行神经网络分类,从而实现对信号波形的区域划分.文献[7]基于变化点检测方法和生物信息学分析方法,利用脉冲幅度的变化来提取雷达信号的基本波形,从而对波形进行区域划分.文献[8]以CPI 特征为主,将参数特性一致的脉冲划分为一组,并按照CPI 脉冲数合并.此方法受设定的门限值影响较大,只能划分参数特征区别明显的脉冲序列.上述方法均针对某一种参数进行分析,具有一定的局限性,且在脉冲数量较少时效果不太明显.
文献[9]分析了目标波形和目标特征的关系,并提出在小波域利用小波对称基进行阈值降噪处理,在时域利用小波重构信号阈值获取目标波形序列,提高了目标检测的可靠性.国防科技大学的欧健博士基于多功能雷达多层级信号结构模型,参考了脉冲样本图的表示方法,并结合PSR 模型提高了雷达字提取的准确率.上述研究方法没有解析多功能雷达每一种行为状态映射到的多功能雷达特征参数上,在一定程度上并不能完整表现某一种行为.通过分析多功能相控阵雷达的基本工作原理得知,雷达信号的脉宽、波束方位指向、脉冲重复间隔、信号带宽等参数均与雷达的工作任务调度密切相关[10].当雷达的工作状态改变时,所需要搜索的远近不同,方位不同,所需能量不同,都会使信号参数随之改变.因此,本文引入活动行为分析中的概念,对雷达参数进行变化点检测[11],其意义在于,在时间序列数据中检测突然发生的变化,这些突变可能就是雷达在完成一个任务并进行下一个任务的表现.对雷达信号脉冲进行任务型划分,可以将复杂的雷达行为变化转换为简单的雷达工作模型,并分析其规律,为之后进行雷达行为识别奠定基础.此方法不需要任何先验知识,并且在脉冲数量较小的情况下,也能实现较高准确率的分析结果.
1 雷达资源调度
多功能相控阵雷达能够自适应调度工作任务,其特性性能可以自动调整,根据实际情况适应当前的战场环境[12-13],如图1所示.
雷达的资源调度可以分为任务优先级决策和调度决策两方面.任务优先级决策是指多种工作任务的优先级划分,由传感器的分配决定;调度决策是指针对不同的雷达工作进行时间和能量的分配.在预置任务调度程序下,MPAR 可以实现实时调度搜索、跟踪、多目标跟踪、搜索加跟踪等工作任务.MPAR的每个工作状态都对应一组信号脉冲参数,该信号脉冲参数集包含多个具有特殊代表意义的信息.根据雷达工作任务设置,多组脉冲构成雷达发射信号,经过优化后通过天线实现信息传输.因此,在雷达信号库中存储了多组具有不同任务意义的脉冲信号.MPAR 工作时,可根据指令和顺序切换波束指向,实时发送信号.

图1 某雷达资源调度及脉冲示例图
通常情况下,多功能雷达按照预先设定好的波位编排进行顺序搜索,搜索任务下的脉冲参数相对固定.为了减少资源浪费,研究学者不断优化搜索管理技术,对参数设计和波位编排都进行了深入研究,制定了随机规划模型[14],这也给识别和干扰造成了一定难度.多功能雷达具有多目标检测的能力,在时间资源分配和能量资源两个方面都要进行技术研究.时间资源分配主要指采样时间间隔和波束指向的研究,其根据目标的威胁等级、距离长度、测量要求等情况对跟踪任务进行管理.在波束指向方面,设计者会基于多目标条件,对雷达阵面天线设计最佳算法.
MPAR 天线方向由相控阵天线控制,是一种由计算机灵活控制的阵列,能够快速切换方向,具有敏捷性的特点.MPAR 发射的波束可以独立完成搜索、跟踪、火控等工作任务.当雷达工作状态发生变化时,可以将波束指向切换到指定位置,并在进入下一个工作状态切换到另一个指向前将对应的信号脉冲传输到终端.因此,如果将雷达工作状态映射到雷达信号脉冲上,可以看出不同的工作状态对应不同的脉冲序列组,脉冲序列组的参数也不同.选择合适的脉冲参数分析,判断变化点的位置,可以为区分和识别MPAR 的不同工作状态提供重要依据.
显然,波束指向是分析雷达信号脉冲类型的一个重要指标.同样,在不同战场环境和任务调度要求下,脉冲宽度、脉冲幅度、脉冲重复间隔、信号带宽等都是具有分析意义的参数.
雷达对抗侦察装备通过对雷达信号的截获侦收与处理可以获得丰富的脉冲序列数据,然而,未经合理分割的连续的脉冲序列往往包含各种行为模式的切换,难以用来直接作为训练样本投入应用,必须对雷达信号脉冲序列进行预处理,通过合理的变化点检测方法分割序列,以获得干净、有序的代表性序列样本,为进一步的学习与智能处理提供数据基础.本文面向雷达行为识别,基于多维参数条件概率的贝叶斯准则,探求雷达脉冲序列变化点检测方法.
2 变化点检测
变化点检测基于贝叶斯准则,估算概率在候选变化点前后的比率.Feuz 等利用变化点检测的方法识别活动边界,使用提示式介入方法判断在脚本环境和非脚本环境下的活动变化[15].Avci 等提出了一种基于序列模式挖掘引入远程交互的新方法[16].将学习概率模型整合到分段标记算法中并应用于新的序列,根据提取的模式的匹配进行标记.利用挖掘模式丰富基于传感器的表示可以改进顺序和分段标记算法的结果.Yamada 等提出了一种基于来自两段的时间序列样本之间的非参数散度估计进行变化点检测的算法[17].变化点检测算法已被应用于多个领域,都有着非常优秀的成果.
雷达行为的变化点定义为: 变点检测算法中引起条件概率变化较大的点.本文引入变点检测算法并作出以下改进: 基于固定长度滑动窗口的变化点检测迭代算法是观测某一变化点附近的数据,估算特征描述的概率,来预测下一个突变点或是行为边界的大致位置.
2.1 行为分割及窗口滑动算法
行为分割将流式事件分割成没有重叠的子序列或分区.每个子序列内部必须是均匀的且只代表单个行为.它把每一个不同的序列映射为一个对应的行为标签.因此,行为分割是指将一个连续的数据流分割成离散的、有意义的行为执行单元.
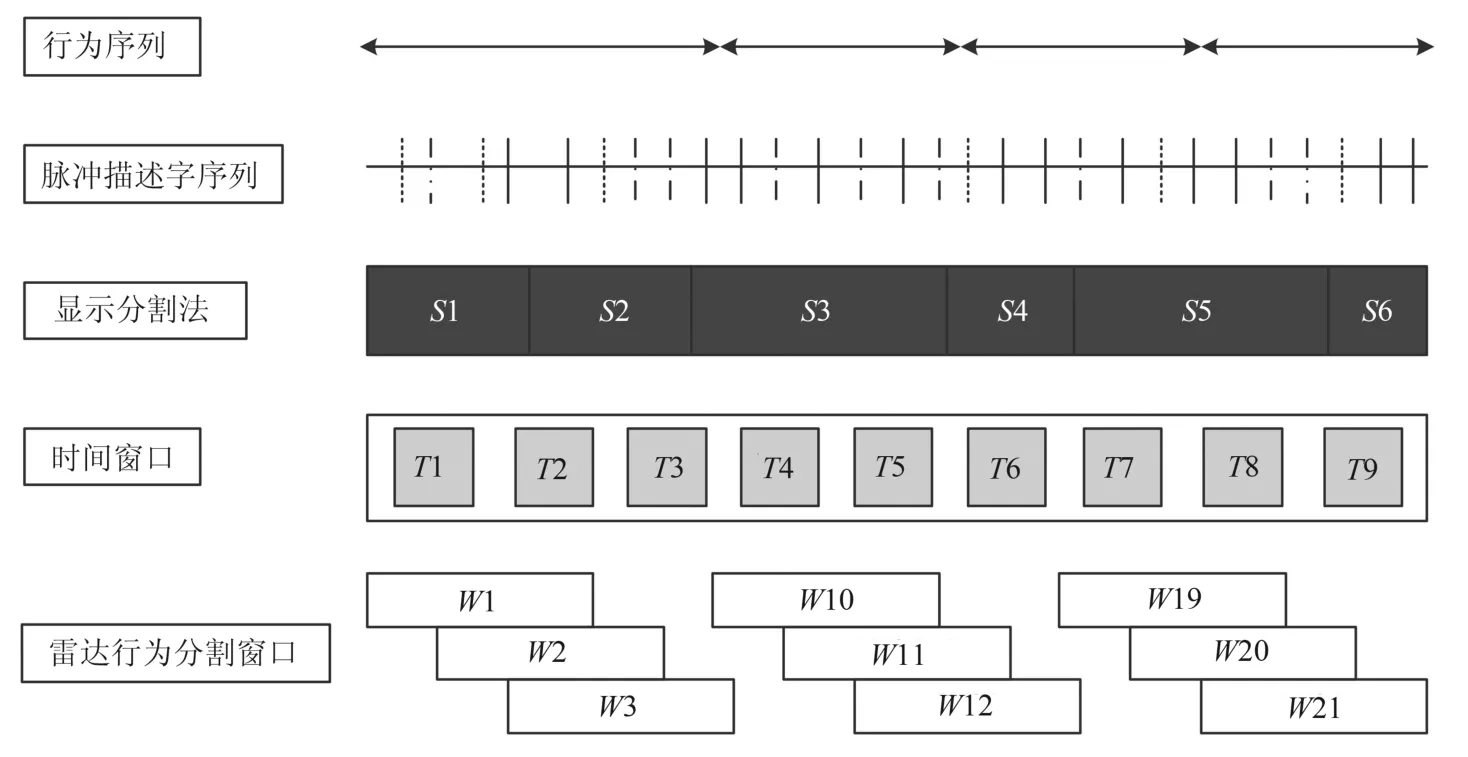
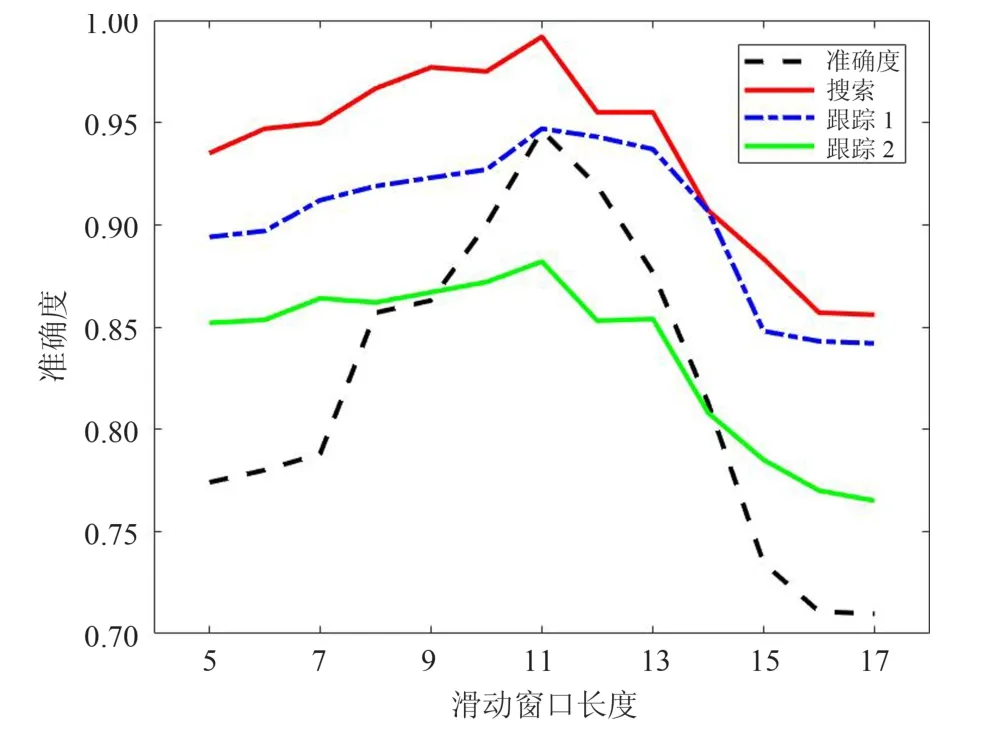
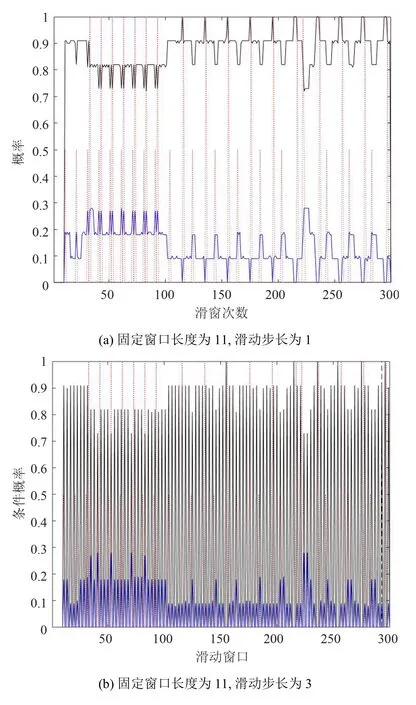
给定一个脉冲描述字事件序列SSS,S= 如图2所示,在不同的行为时间下可以采用不同的分割方法,如显示分割法、固定窗口时间的滑动窗口提取法、用固定窗口长度滑动窗口提取法. 在处理数据流时,可以将整个脉冲序列分割成一组可能重叠的有序子序列,或者一组滑动窗口.概率方法可用于为需要确定标签的每个事件派生适当的窗口大小.候选窗口集的长度通常定义为{W1,W2,··· ,WL},其中,W1为从任何行为数据中观察到的最小窗口长度,WL为所有行为观察到的窗口大小的中位数,其余通过[W1,WL] 划分为大小相同的箱子(bin)来确定,同时需要估计行为与事件关联的概率. 选取滑动窗口方法,将所有脉冲组输入,从输入序列首位置开始,取固定段,然后不断扩展滑动,直到概率出现变化,并记录变化点.然后重复此过程,在最近段不包括先前第1 个数据点开始,直到所有数据处理完成. 在每一个时间步或行为事件之后更新当前状态,这样可以计算出一个行为在当前时间点或当前行为之前结束的概率,并与把行为包括进此时间点的概率相比较,判断此突变点是否为行为边界的标志. 定义从当前时间点回溯到最近变化点之间的脉冲描述字数据称为一个行程,用r表示.假设检测到的最近变化点已经过去了t个单位时间,则与最近数据相关联的有t个不同长度的行程,那么在接收到最新数据之后再进行变化点检测,可以考虑两种可能性: 新的序列是当前行程的一部分,因此当前行程的长度加1;或者是变化点发生,当前行程结束,新的序列是新行程的一部分. 图2 脉冲序列分割 设rt表示最近行程的长度,则在给定前面t个事件下rt的概率计算公式: 假设给定了相应的脉冲描述字时间序列,则根据贝叶斯准则,在t事件之后rt的概率分布可以按以下公式计算: 其中,P(rt&e1:t)表示转移概率,即从当前序列到下一序列为状态转变的概率;P(et|rt-1&e1:t-1)表示最近序列属于每一个可能行程的概率,每一个行程是通过前一个数据点确定的. 假设每一序列之前的概率值是已知的,那么rt的概率取决于两种可能性,即变化点发生或变化点没有发生,当行程长度加1.为对此两种可能性进行判断并计算在这两种情况下的概率,需要计算风险函数(Hazard Function)H: 将上式定义为根据样本数据,终止一个行程的序列数与总序列数之比. 基本步骤如图3所示. 多功能雷达脉冲序列类比于时间序列,在分析的过程中,基本很难用一个简单的函数准确表示整个序列,但是可以用多个段来表示,每个段用一个简单函数表示.在之后的识别过程中,可以把每一段作为一个回归模型或分类器模型进行学习; 也可以通过对样本数据的训练学习,对每一段进行验证识别. 为检验基于变化点对雷达脉冲序列分段的结果与真实数据是否一致,通常采用以下3 种方法: 1)自顶向下.将之前完整的脉冲序列看作是一整段,在段中选择一点,对分成的两段进行性能分析,重复此过程,直到性能不会改善为止,最后将结果与之间分割出来的结果做比较;2)自底向上.把每一个行为状态代表序列看作一段,取出相邻两段进行合并,重复此过程,直到再合并也无法改善性能为止,最后将结果与之间分割出来的结果做比较;3)滑动窗口.从完整雷达脉冲序列的第1 位开始,先取段大小为1,然后每次窗口大小加1,扩展段落长度,直到性能不再改善.然后取后一点为起始点,并重复之前过程,直到序列全部分段完成.最后将结果与之间分割出来的结果做比较.每个方法都有其适合的样本数据类型,也可以将方法组合达到最佳效果. 图3 变化点检测算法流程图 仿真条件设置如下: 脉冲序列共有300 组,分别代表近距离搜索、跟踪目标1 和跟踪目标2 三种雷达行为状态.其中设有33 个变化点.在不同的工作模式下,工作性能要求也不同.脉宽在不同距离分辨力要求下具有一定差别,同时波束方位也按照一定目标方向转换,因此选取脉宽和波束方位两种参数进行变化点检测.部分雷达信号脉冲及其对应的工作模式如表1所示. 为确定合适的固定窗口,分别设置滑动窗口长度为5、11、17,滑动步长为1,即分别每个实验中的窗口检测3、11 和17 组脉冲序列,并向右滑动一个脉冲序列.如图4给出了仿真实验的处理结果.表2为不同窗口长度检测后准确率的对比结果. 表1 雷达信号部分脉冲序列及对应的工作行为状态 表2 不同窗口长度检测准确率 图4 以窗口长度为变量的变化点检测结果 由图4和表2的结果可以看出,基于固定长度滑动窗口的变化点检测迭代算法会受到固定窗口长度的影响而影响检测结果.在此次仿真实验中,当固定窗口长度为5 时,由于窗口长度较小,窗口内脉冲序列数较少,从而出现漏警的情况较多;当固定窗口长度为17 时,窗口长度较大,窗口内脉冲序列较多,则在同一个窗口内的变化点较多,不容易识别,且运算误差较多,产生大量虚警、漏警.当固定窗口长度为11 时,变化点检测能够以较高性能完成脉冲序列的变化点估计,虽仍然存在虚警的情况,但不影响主要变化点的判断.由图5的结果可以看出,适当的步长选择对划分结果有重要的影响,也可以看出变化点检测的准确度越高,脉冲序列的功能性划分效果也越好,即脉冲序列划分后对应的雷达工作状态识别率越高.由于是对时间序列进行检测,工作状态对应的脉冲序列的排列顺序也很重要,当变化点未被检测出或者被错误检测时,相邻两组脉冲序列的分类情况都可能会受到影响. 为确定合适的滑动步长,设置滑动窗口长度为11,滑动步长分别为1、3、8,图6给出了仿真实验的处理结果. 由图7的对比结果可以看出不适当的步长对检测结果影响很大.由于该机载火控雷达作业时被截获的信号表现了实时变化的工作状态,因此滑动步长为1 时,可以准确地进行变化点检测并划分脉冲序列; 当滑动步长为3、5 或8 时,会产生大量漏警,当步长逐步增大,会逐渐失去变化点检测的意义.综上,应该针对不同的数据特点和大小,设置适合的滑动窗口长度和滑动步长. 图5 窗口长度与检测结果准确度的关系 为了避免敌方轻易检测到雷达信号,并且能够迅速识别出雷达行为,做出干扰,雷达设计者们通常会将雷达信号参数设计多种不同的变化样式,例如PRF 分组、PRF 抖动、PRF 参差等,尤其是MPAR 这类多功能、多任务、灵活捷变的新体制雷达.反之,对MPAR 复杂的脉冲序列分析也会存在一定难度.实验选取对某机载火控雷达截获的部分信号,对脉冲序列进行变化点检测,观察并分析实验结果. 图6 以滑动步长为变量的变化点检测结果 图7 滑动步长与检测结果准确度的关系 仿真条件设置如下: 截获选取某型机载火控雷达的脉冲序列共有1 813 组,分别代表两种不同的雷达行为状态,滑动窗口长度选择11,滑动步长选择1.实验结果如图8. 由实验结果可以看出,1 813 组脉冲序列中出现了接近20 组特殊的序列,并且将脉冲序列分为两部分,脉冲组数分别为601 和1 212.为分析两组的脉冲序列的特点,对两组分别进行第2 次变化点检测,滑动窗口长度选择6,滑动步长选择2,两组检测结果如图9. 由图9可以分别看出每一组脉冲序列中都存在脉冲组循环重复的现象,平均每300 组左右会重复一组,且每一小组内平均每45 组会改变脉冲参数.根据上述分析的特点,可以判断这两组脉冲序列存在PRF 分组变化样式,且第2 组脉冲序列在第600 组到第800 组之间频繁出现突变,但不影响脉冲序列检测,可以判断是脉冲序列掺杂了杂波.因此,可以判断本文所提变化点检测算法能够对具有PRF 分组的脉冲序列进行划分和判断. 图8 非常规脉冲变化点检测第一步结果 图9 非常规脉冲变化点检测第二步结果 传统基于CPI 的脉冲划分算法本质上是将具有相同脉冲状态的序列挑选出来合并(如图10),打乱了原有的时间序列关系,破坏了多层级雷达行为模型各层之间的语义转换关系,必须在获取所有脉冲信息后才可以进行划分,难以满足面向行为识别的雷达脉冲序列实时分割的需要,且该方法适用于相对稳定的PRF 变换规律,对于MPAR 的PRF 捷变特性可能难以适应. 图10 基于CPI 的脉冲划分算法示意图 相比上述算法,本文提出的变化点检测算法可以在导入脉冲序列的同时进行检测,对时序序列直接进行划分,有一定的时效性和准确性,能够很好地提取雷达词组,并判断雷达行为状态转换方式和意图.经过变化点检测算法后得到的脉冲序列对应的MPAR 行为已经是某一种单一工作模式,更利于网络训练和后期识别的需要,减少了工作量,提升了识别效果. 文献[1] 提出基于事件驱动和匹配滤波的雷达词组提取方法对提取“雷达词组”具有一定意义,此方法面向的“水星”多功能雷达具有相对固定的调度模板,即使存在同一雷达词组代表多种工作模式的情况,也具有一定的规律,在这种情况下,使用模板匹配的方法可以高效地完成脉冲划分工作.但是,大多数新体制MPAR 采用自适应调度的方法,不具有清晰准确的调度规律,且构成雷达词组的雷达字有多种组合方式,可以表示同一种雷达行为状态,这与雷达设计者的经验习惯、实际的战场环境都密切相关.本文的变化点检测算法可以面向不同的MPAR进行脉冲划分,不需要考虑不同调度方法带来的影响,更具有普适性. 雷达对抗侦察装备通过对雷达信号的截获侦收与处理可以获得丰富的脉冲序列数据,然而,未经合理分割的连续的脉冲序列往往包含各种行为模式的切换,难以用来直接作为训练样本投入应用,必须对雷达信号脉冲序列进行预处理,通过合理的变化点检测方法分割序列,以获得干净、有序的代表性序列样本,为进一步的学习与智能处理提供数据基础. 本文提出了一种基于定长滑动窗的变点检测方法,解决了高结构脉冲序列的分割问题.该方法的目的是提取MPAR 各行为之间的变化点.基于定长滑动窗口的变点检测方法可以更好地分析雷达信号脉冲序列的变化点,在MPAR 实时转换的情况下,对数据源的精度有一定的容忍度,得到了有意义的实验结果. 然而,在实际战场环境中,复杂的信号环境也会影响这种方法.当信号抽选率很高时,相互重叠的雷达信号脉冲会影响变化点检测; 信号预分选掺插了其他雷达信号时,会造成严重干扰.因此,我们需要其他辅助方法来解决这些问题.例如,对采集到的信号进行滤波,“滤除”大量的噪声信号等干扰因素;选取合适的抽取速度,避免造成信号叠加. 本文研究多功能雷达脉冲序列划分的目的是为多功能雷达行为辨识提供合理可靠的样本数据.在后续的研究过程中,可以根据检测到的变化点对雷达脉冲序列进行分割,并通过聚类、神经网络等算法对雷达行为进行识别[18-20].2.2 变化点检测



2.3 分段表示

3 仿真实验
3.1 实验1




3.2 实验2


3.3 算法比较与分析

4 结论
猜你喜欢
钢管(2022年2期)2022-11-28
振动与冲击(2022年19期)2022-10-17
皮肤病与性病(2021年3期)2021-07-30
中国科学院大学学报(2021年1期)2021-01-14
小学生学习指导(低年级)(2020年10期)2020-11-26
电子制作(2019年10期)2019-06-17
意林(绘英语)(2018年1期)2018-04-28
作文大王·低年级(2017年11期)2017-12-05
学苑创造·A版(2017年1期)2017-01-19
科技资讯(2016年18期)2016-11-15