PREA环及其平行智能
2019-12-26 01:38阳东升张维明
指挥与控制学报 2019年4期
阳东升 张维明
指挥控制过程机理与尺度密切关联,不同的尺度兵力系统,其指挥控制活动的基本属性存在本质的差异[1],这是指挥控制领域的一个新的发现.这一发现不仅解释了诸多学者对经典理论模型—-OODA 环在使用过程中提出的问题根源所在,也界定了OODA 环的适用范围,即作战平台,同时,也发现了指挥控制领域关于机理描述理论的一个新的空白,即从平台上升至体系,军事体系指挥控制活动的机理模型.筹划(Planning)→准备(Readiness)→执行(Execution)→评估(Assessment)→筹划(Planning)(PREA 环)[2-3]的提出正是这一背景需求,填补了这一理论空白.
事实上,虽然PREA 环与OODA 环一样简洁,但其组织实施要复杂得多,根源在于从适用OODA 环的作战平台上升至军事体系后,其指挥控制活动的基本属性更多体现在社会域,而不是物理域,如感知和理解问题、决策问题、行动问题,都涉及多个主体间的协同,包括共享感知、协同决策、协同行动等等.在一个分布的军事体系中,指挥控制活动在社会域的相关需求给PREA 环的运行带来了极大的挑战:一是多个主体对战场的共同感知和理解问题; 二是多个主体对战场态势演化趋势的认知协同问题; 三是多个主体对同一事件处理方案的协同决策问题;四是多个主体在分布环境中的协同行动问题.在军事体系层面的PREA 环如何应对新的挑战?本文尝试PREA 环与平行理论的数字四胞胎(物理、描述、预测、引导)相结合,建立PREA 环的平行智能概念与框架.
1 PREA 环
PREA 环的核心理念体现在两个方面: 一方面是指挥决策方式以基于预案为主,强调作战筹划活动,在筹划阶段建立充分的预案; 另一方面是行动方式基于布势展开,强调行动的直前准备活动,即从当前兵力系统状态到计划执行前所需要的状态,完成计划执行的相关准备,包括兵力部署的转换和直前筹划活动.这两个方面也是与单一作战平台指挥控制活动的本质差异,单一作战平台的指挥决策方式通常是基于规则,在行动方式上,决策即行动,不存在决策至行动的过渡环节—- 兵力部署转换.在军事体系层面,这一环节既要克服军事体系整体的惯性与阻力,同时,还要考虑这一环节可能的态势变化带来的新的决策需求,因此,在这一环节的“直前筹划”显得不可或缺.
PREA 环建立了军事体系指挥控制活动的一般规律:筹划→准备→执行→评估4 个环节构成闭环过程,不同的环节对应不同的态势需求和决策方式.
在筹划环节,决策的时间窗口大,通常采用基于预判的周密决策方式,通过预想各种可能的情况作出完备的预案,为基于预案的决策奠定基础.在这一环节,态势信息以动向情况为主,包含各类要素的预测和预报数据,构成筹划活动所需要的预测/预判态势.
在准备环节,决策窗口进一步变小,而战场态势趋于明朗,通常,实时态势进入决策视野,实时态势与动向情报以及各要素的精确预测、预报共同构成了准备环节的“直前态势”.在这一环节,通常采取基于预案的精确决策方式,即根据“直前态势”,匹配选择预案,并对预案进一步进行修订调整,以满足执行需要.
在执行环节,通常按计划实施,由于实时对抗博弈的需要,决策窗口变小,决策活动主要体现在执行层面的规则与程序的选择,不涉及方案预案的改变,因此,在这一环节,其决策方式通常是基于规则的快速决策,对应的态势需求是实时态势,包含各类要素(情报、通信、水文、气象、航海、导航等等)的实时数据.
在评估环节,评估活动包括战场态势评估、行动效果评估、作战能力评估等,评估活动的基本依据是态势演化过程的历史数据,在评估环节同样存在决策活动,即根据评估结论进行转换决策: 行动按计划执行,态势按预期演化,则计划不变,行动继续;态势演化不在预期范围内,行动按计划实施已不能促进态势向预期演化,则需要调整行动预案;态势演化不超出预期,则结束行动,再次筹划,转入新的行动准备.
PREA 环及其决策方式与态势需求如图1所示.
从宏观层面,PREA 环是一个持续循环运转的过程,从战场的初始态势开始,以期望的目标为牵引,PREA 环持续改变态势,直到期望的最终态势实现,PREA 环结束.
PREA 环的运行如图2所示.
在PREA 环的持续循环过程中,每一个PREA环向后续PREA 环的跳转都是从“评估” 环节跳出,从后续PREA 环的“筹划”切入,通过“评估”实现各PREA 环的无缝衔接.每一个PREA 环都是战场态势演化的“驱动力”,所有的PREA 环共同构成了战场态势从初始态势向最终态势演化的路径.
2 PREA 环的平行智能框架
2.1 平行数字四胞胎

图1 PREA 环及决策方式与态势需求

图2 PREA 环的循环与战场态势的演化
平行数字四胞胎源自复杂系统科学,是复杂系统管理与控制的新概念,由中国科学院自动化研究所复杂系统管理与控制国家重点实验室王飞跃教授提出.平行数字四胞胎概念的最初雏形是“影子系统” (Shadow Systems),在20 世纪90 年代,王飞跃教授提出为复杂电网系统建立“影子系统”(Shadow Systems)的嵌入式仿真方法(Embedded cosimulation),优化其调度过程并提高其安全性和效益[4].2004 年,王飞跃教授对“影子系统” (Shadow Systems)概念进一步升华,提出“平行系统方法与复杂系统的管理和控制”[5],为应对复杂系统的管理与控制等难题提出了新的解决思路,建立了集人工系统(Artificia Systems,A)、计算实验(Computational Experiments,C)、平行执行(Parallel Execution,P) 为一体的ACP 平行智能理论体系.
近年来,德国西门子在其先进工业控制基础上提出了数字双胞胎(Digital twin)的概念,通过收集物理实体的信息并建立数字化模型来预测工业机器潜在问题并及时改进,进而提高工业生产效率[6].数字双胞胎(Digital twin) 的典型应用是军事领域的“数字林肯”.2019 年11 月,美海军信息战系统司令部(NAVWAR)完成首个复杂系统—-林肯号航空母舰的数字孪生模型的开发[7],简称为“数字林肯”,“数字林肯”是美海军数字化工程转型的重要里程碑,数字林肯不仅仅可以在航母这一复杂系统平台的完工交付前通过虚拟环境对解决方案进行测试和评估,在实地部署前解决发现的问题,此外,还可以提高这一复杂系统的可靠性和赛博安全性,同时降低作战人员的风险.
理论上,数字双胞胎只是实现虚实互动平行系统的一种特殊手段,而且还停留在王飞跃所提ACP方法[8-12]的第一阶段(即建立人工系统) 和部分预测功能,并未充分利用其物理、描述、预测、引导“多位一体” 的完整数字四胞胎结构.2019 年,阳东升等运用平行数字四胞胎概念,提出海上巨无霸的—- 航空母舰这一复杂系统管理控制的新理念[13],即平行航母,定义平行航母的数字四胞胎(Digital quadruplet): 物理航母(Physical carrier)、描述航母(Descriptive carrier)、预测航母(Predictive carrier) 和引导航母(Prescriptive carrier),建立平行航母从物理航母到描述航母的描述智能、从描述航母到预测航母的预测智能、从预测航母到引导航母的引导智能框架体系.
平行数字四胞胎不仅仅是虚实结合的管理控制手段,从哲学意义上,它体现了一个基本的管理管制思维,从物理存在到抽象,再从抽象到新的构想,最后从新的构想返回物理世界,实现对物理存在改造的导向,构成一个管理控制闭环,这一闭环过程如图3所示.

图3 平行数字四胞胎及其运行基本过程
平行数字四胞胎的管理控制思维可以简单理解为虚拟空间与实现的结合,如何进一步细化,则可从物理域、信息域到认知域的逐步升华,物理域的行为即对物理存在的执行引导活动,而信息域的活动主要体现在对物理存在世界的抽象,认知域的活动则体现在对抽象概念的理解、预测和构想.
2.2 PREA 环与平行数字四胞胎
本质上,平行数字四胞胎建立了复杂系统管理与控制的3 个层次(物理存在的状态、虚拟空间的抽象状态、思维空间的认知状态)和4 种状态(物理、描述、预测、引导),其中,4 种状态是持续转换的闭环过程,从物理状态到抽象的描述状态需要观察和评估活动,从描述到预测需要构想筹划,从预测到引导需要计划与指令开发,从引导到物理需要执行监控.对一个军事体系,其4 种状态的转换过程正是PREA环4 个环节的主要活动.
从物理状态到描述状态,以态势数据驱动为主,态势数据包括态势持续演化的历史数据和当前的态势数据,对数据的分析,由以评估活动为主.
从描述状态至预测状态,以事件驱动为主,通过事件的理解和对态势演化趋势的判断,建立未来构想,并拟制应对方案预案.
从预测状态到引导状态,以方案驱动为主,基于既定的事件处理方案,制定具体实施计划.
从引导状态到物理状态,以指令驱动为主,这一状态的转换,需要指令开发,并进行执行监控.
PREA 环与复杂系统的平行管理与控制理论存在哲学上的一致性.PREA 环与平行数字四胞胎可以完美结合,平行数字四胞胎建立复杂系统管理控制虚实结合的4 种状态,而PREA 环建立4 种状态之间的转换,如图4所示.
2.3 PREA 环的平行框架及运行方式
PREA 环与平行数字四胞胎是过程与状态的区分,没有本质的差异,两者的结合才是复杂系统管理与控制活动“虚”与“实”的完美呈现,缺少PREA 环则没有了数字四胞胎的转换过程,没有数字四胞胎对复杂系统的管理控制过程来说则缺少了阶段状态的概念描述.
PREA 环的平行框架包含4 种状态和4 种过程以及状态与过程的管理控制、学习培训.4 种状态:预测状态、引导状态、物理状态和描述状态,4 种过程: 预测规划过程、计划指导过程、执行监控过程和观察评估过程,4 种状态与4 种过程以4 类主体的形式呈现: 预测规划主体、计划指导主体、执行监控主体、观察评估主体.平行框架的管理与控制模块实现对过程产品的管理控制,包括方案预案、计划、指令、数据等等;学习与培训模块实现对4 类主体的管理控制.
PREA 环的平行运行方式可总结为多环嵌套,其中基本环为4 种状态的依次转换:预测→引导→物理→描述,嵌套环包括从描述状态至物理状态和引导状态的两种转换:评估确认保持当前计划不变,继续执行,构成从描述至物理的闭环;评估确认计划需要改变,在改变计划后继续执行当前任务,构成从描述至引导状态的闭环.
PREA 环的平行构架与运行方式如图5所示.
PREA 环的平行框架的4 类主体是4 种状态和过程集合体,各主体承载相应的状态转换与状态建立的职能.
观察评估主体:观察评估主体以数据为驱动,观察态势数据的变化,识别潜在的或已发生的事件,评估变化可能带来的影响,包括计划指令的适用性、方案预案的适用性,为状态转换的决策活动提供依据.
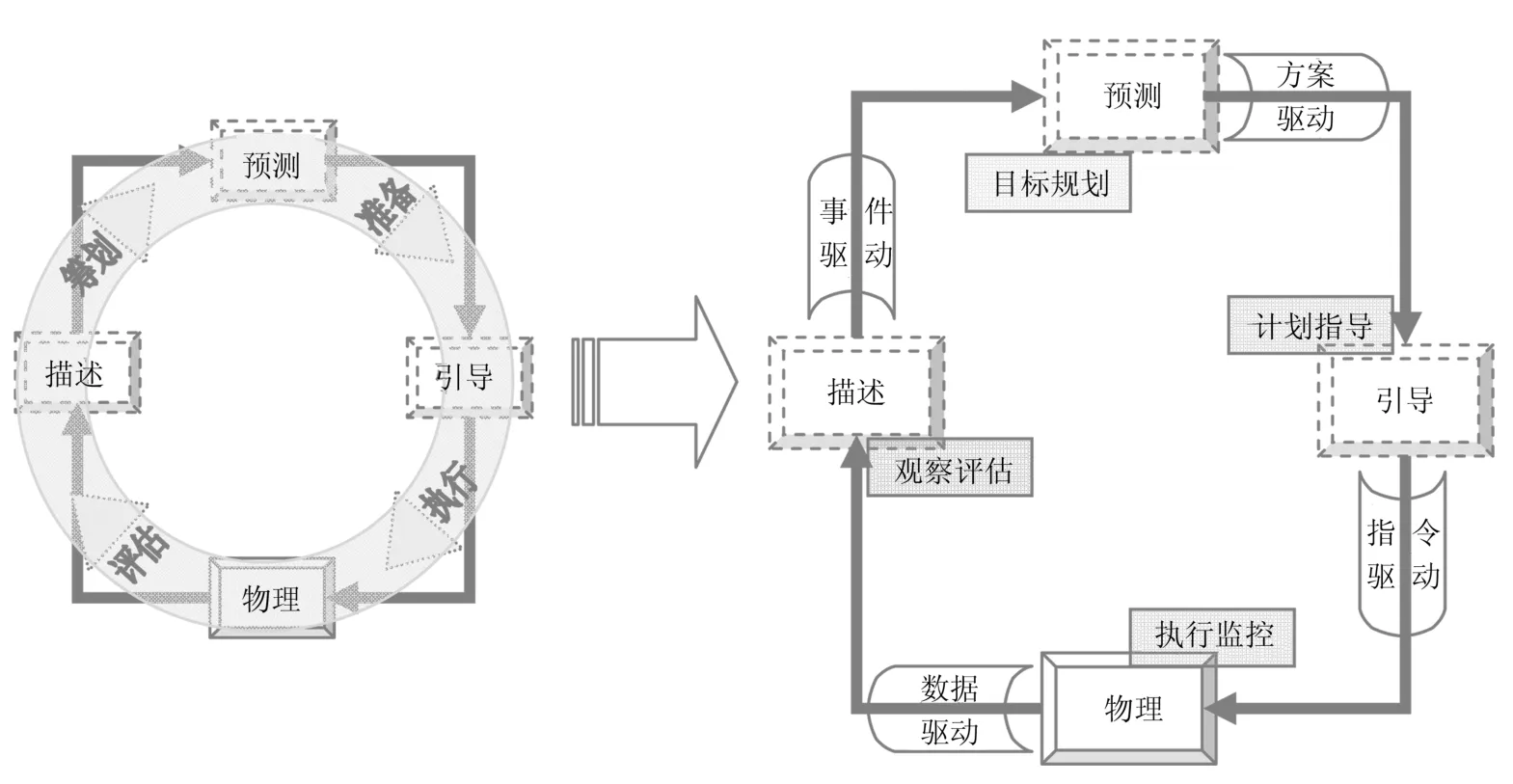
图4 PREA 环与平行数字四胞胎

图5 PREA 环的平行框架与运行方式
预测规划主体:预测规划主体以事件为驱动,在观察评估主体确认事件并确定转换决策后,预测规划主体构想事件的处理预案,包括态势演化的预判、概念的构想、方案预案的生成、方案预案的推演评估等等,预测规划主体最终选择事件处理的方案预案.
计划指导主体:计划指导主体以方案为驱动,在预测规划主体确定事件处理的方案预案后,计划指导主体进行方案实施的规划活动,包括计划的生成、计划的协同推演、计划指令的开发以及分发.计划指导主体最终输出指令,以指导对物理存在改造的行动,驱动态势向期望的方向演化.
执行监控主体:执行监控主体以指令为驱动,在指令分发后,执行监控主体持续监控执行指令的行动,包括计划进程监控、行动监控以及执行主体的状态监控,所有监控活动根据实时监控数据进行行动的修订或指令调整,保持计划能够得到充分的执行.
3 平行PREA 环的观察评估智能分析
平行PREA 环的观察评估是对物理世界的观察,是对变化或潜在变化的评估.观察评估以数据为驱动,其中,数据包括战场态势数据、作战环境数据、兵力兵器状态数据等等,在与物理世界的数据同步,且观察发现变化或潜在的变化可能后,进行数据变化的评估,评估变化可能的影响,包括对计划进程的影响、对当前行动的影响、对后续行动的影响等,通过评估,以确定状态转换的决策,或者持续当前的行动,或者修订、调整计划,或终止行动,转入后续行动的规划.
平行PREA 环观察评估的智能形态可定义为3类智能: 一是数据同步智能; 二是数据分析智能; 三是评估转换智能.数据同步智能实现物理世界与平行PREA 环描述状态的自动同步,包括自主选择同步的时机、同步的数据内容、数据同步方式等.数据分析智能实现对同步数据的自主分析,包括数据趋势分析、变化或潜在变化的分析、事件的识别等.评估转换智能实现对数据变化与事件的自主评估,以及状态转换的自主选择,其中评估智能包括态势演化评估、行动效果评估、能力变化的评估等,转换智能体现在从描述状态向物理状态、引导状态或预测状态的自主选择.
平行PREA 环的观察评估智能需要解决对物理存在的描述问题、数据同步问题、数据变化的观察识别以及评估问题,在技术上,需要对物理实体数字孪生的建模技术、数据同步管理技术、态势评估技术、事件与变化的识别分析技术等等.
平行PREA 环观察评估智能形态与技术需求如图6所示.

图6 平行PREA 环的观察评估智能
4 平行PREA 环的预测规划智能分析
平行PREA 环的预测规划活动以事件为驱动,在描述智能确认事件后,预测规划建立事件处理的方案预案,具体活动体现在4 个方面: 一是对事件的预测判断,包括未来可能的演化和事件处理综合判断的SWOT 模型(优势、劣势、风险与机遇);二是事件处理的构想概念,包括事件处理所期望的最终目标状态构想、阶段目标构想;三是从当前状态至最终目标状态实现的途径搜索,即方案预案库的建立;四是方案选择,即从可行的方案预案中,搜索最佳方案,确定从当前状态至最终目标状态实现的途径.
平行PREA 环的预测规划智能形态可定义为4个环节的智能:首先是预判智能,实现从事件识别到自主产生处理事件的综合研判; 其次是意图构想智能,实现对(上级或宏观整体) 意图的理解和事件处理目标自主勾画;第三是方案预案的生成智能,从自主勾画的目标概念生成可行的演化途径,形成方案预案库;第四是方案的推演与评估智能,通过计算实验,实现从方案预案库中优化选择最佳方案.
平行PREA 环的预测规划智能需要解决事件处理综合判断的SWOT 模型数据问题、目标构想问题、方案预案生成问题、方案预案推演评估问题以及方案选择问题等,在技术上,需要SWOT 分析技术、构想目标概念的分析技术、方案预案的生成技术、方案预案的推演评估技术以及方案优选技术等.
平行PREA 环预测规划智能形态与技术需求如图7所示.
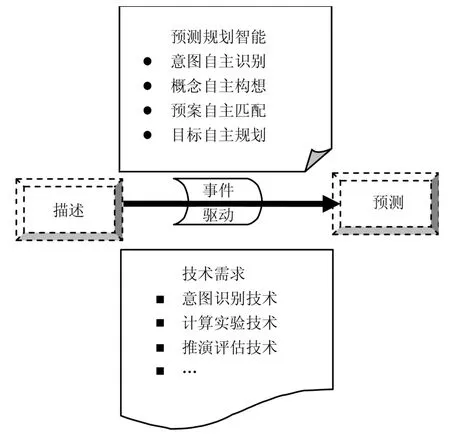
图7 平行PREA 环的预测规划智能
5 平行PREA 环的计划指导智能分析
平行PREA 环的计划指导活动由事件处理的方案驱动,在预测规划智能主体确定事件处理的方案后,计划指导开始方案的执行分解和指令开发,具体活动包括4 个环节: 一是制定执行计划,包括兵力兵器资源的分配、时域、空域、频域的管理规划以及各种保障要素的计划制定等;二是组织协同,对所有兵力兵器以及相关作战要素按计划进行推演分析,进一步修订完善计划;三是指令开发,根据计划生成指令;四是指令分发与指导,向执行对象分发执行指令,并指导执行对象的相关活动.
与计划指导活动相对应,平行PREA 环的计划指导智能呈现4 种形态: 一是计划的生成智能,包括对方案的自动解析、对战场资源的自主分配、对各类作战要素的自主规划等;二是自主协同,即通过计划推演分析,实现相关执行对象在虚拟空间的自主协同;三是指令自主开发,即依据计划自动生成相关指令;四是指令的自动分发,即根据计划需求向执行主体自动分发指令.
平行PREA 环计划指导智能需要解决的关键问题是计划生成和协同问题,计划生成问题需要解决核心的规划算法、各类作战要素的冲突检测与消除算法; 在计划协同问题上,关键技术是计算推演,涉及各执行主体在虚拟空间的协同.
平行PREA 环计划指导智能形态与技术需求如图8所示.

图8 平行PREA 环的计划指导智能
6 平行PREA 环的执行监控智能分析
平行PREA 环的执行监控活动由指令驱动,在指令分发至执行主体后,执行监控活动重点关注物理域的相关变化,包括兵力兵器的状态变化、战场态势的变化、作战环境的变化,主要活动有4 类: 一是作战进程监控,即对计划执行实施整体监控,对偏离计划的行动进行及时纠正,确保计划得到精确执行;二是兵力及其行动监控,即对执行主体—- 兵力兵器的状态及其行动实施监控,在兵力兵器状态或行动与指令意图不相符时,及时进行修正;三是战场态势监控,战场态势监控的方法当前态势的演化与计划行动所期望的态势进行分析比较,目的是确保战场态势向期望的目标态势演化; 四是作战环境的监控,作战环境的监控是对作战环境数据的实时采集,并根据环境数据修正调整作战行动,确保作战行动的有效实施,作战环境监控内容包括陆、海、空、天、电各维度空间的环境数据.
与执行监控活动相对应,平行PREA 环的执行监控智能形态有4 类: 一是作战进程的自主监控,包括作战进程节奏的自主控制、作战进程内容的自主检测以及执行主体间的自主协同等; 二是兵力及其行动的自主监控,兵力及其行动的自主监控关键是指令意图的自主识别和行动自主控制,同时,也包括兵力系统整体状态的自主维护和状态变化的自主控制,确保兵力系统整体状态演化符合预期;三是战场态势的自主监控,战场态势自主监控的关键是战场态势变化与作战行动实施的自主反馈机制,作战行动根据态势演化趋势自主控制行动实施的节奏和方法,达到态势向预期演化; 四是作战环境的自主监控,即作战环境数据实时采集与作战行动之间的关联机制,作战行动根据作战环境数据自主进行修订或调整.
平行PREA 环执行监控智能需要解决作战进程节奏与内容的自主控制、执行主体间的自主协同、从指令执行意图的识别、兵力系统状态描述与监控维护、态势演化与行动调整的反馈机制、作战环境变化与作战行动修订的反馈机制等系列问题,在实现其智能形成的技术支持上,需要提供作战进程的评估、多主体的协同、意图识别、兵力系统描述、态势演化分析技术以及态势与行动的关联分析技术等等.
平行PREA 环执行监控智能形态及技术需求如图9所示.
7 结论
PREA 环源自海上合成编队作战体系的指挥控制机理分析,与平行四胞胎概念建立在复杂系统的管理控制基础之上有着相似的背景,如果用兵力系统的“尺度”观念来度量,两者属于同一尺度空间的概念,可以说,两者的结合是与生俱来的.
PREA 环是从物理域到认知域,再从认知域返回物理域的过程完整描述,而平行四胞胎则是从物理域到认知域,再从认知域返回物理域4 种状态的描述,过程与状态的结合实现了平行PREA 环的完美运行.这是本文的核心理念.
事实上,平行PREA 环是平行军事体系概念的核心要素[14-15],它解决平行军事体系指挥与控制活动虚实结合的关键问题,由于PREA 环的适用范围仅限于宏观尺度的兵力系统,对平行武器概念[16-19]来说,PREA 环有其局限性,在武器尺度上,其指挥控制活动适用的基本理论即OODA 环,宏观尺度的兵力系统与微观尺度的武器平台,两者间是PREA 环与OODA 环的嵌套运行关系,这是新的研究课题.

图9 平行PREA 环的执行监控智能
平行智能本质上是智能活动从物理域到信息域,从信息域到认知域,从认知域到社会的逐步转换过程,其中信息域、认知域和社会域的活动主要在虚拟空间展开,而物理域的活动以现实空间为依托,由此实现了虚拟结合的平行智能.这一基本原理对任何领域的活动来说,都具有普遍适用性,无论是军事领域的指挥控制活动[20-22]、情报活动[23]、网电行动[24],还是经济领域的区块链概念[25],或者复杂系统的管理与控制活动[26-28].因此,平行智能,不仅仅是最初的嵌入式仿真手段,更确切地说,是一种哲学思维.
本文提出PREA 环与平行理论的结合也是遵循这种思维的哲学原理: 以观察评估活动建立从物理体系到描述体系的数据驱动,以筹划活动建立从描述体系到预测体系的事件驱动,以组织计划准备建立从预测体系到引导体系的方案驱动,以执行监控活动建立从引导体系至物理体系的指令驱动方案,根据数据驱动、事件驱动、方案驱动和指令驱动定义PREA 环的观察评估智能、预测规划智能、计划指导智能和执行监控智能概念.
实现PREA 环的平行智能,既可以是一个非常艰难且漫长的过程,也可以是一个立竿见影的过程,尽管这两句话互相矛盾,但具有哲学意义上的统一性.立竿见影的PREA 环平行智能是人在回路的平行PREA 环,在筹划、准备、执行、评估环节,都由主体——人来主导各个环节的活动,这是当前的现实,可以说立竿见影,而真正意义上的PREA 环平行智能实现各个环节的智能主导,无人回路,则不仅仅需要智能技术的高度发展,还有社会伦理的转变,比如对智能技术的绝对信任、让智能技术主导未来的战争.
致谢
在指挥控制领域,博依德的OODA 环是指挥控制活动描述的经典理论.
2018年底,作者根据近十年一线部队的指挥实践经验,提出对OODA 环的质疑,界定其适用范围为作战平台,在宏观体系层面需要新的理论指导,并提出PREA 环理论模型,弥补了宏观尺度上指挥控制机理描述的理论空白,在与王飞跃老师交流这一理论成果时,王飞跃老师认为指挥控制领域的理论研究滞后,指挥控制与平行理论的结合应该是新的方向,并提出平行航母、平行舰队的概念与研究思路.在王飞跃老师的指导下,经过近一年的深入研究,我们发现平行理论已经在理论滞后的指挥控制领域竖起了一面新的旗帜,PREA 环不仅完全可以与平行理论完美结合,而且是PREA 环实现智能的必经之路,在此对王飞跃老师的启发与指导表示衷心的感谢.
猜你喜欢
社会科学战线(2022年4期)2022-06-15
新高考·高一数学(2022年3期)2022-04-28
思维与智慧·上半月(2022年4期)2022-04-08
疯狂英语·新读写(2021年10期)2021-12-07
成都信息工程大学学报(2021年2期)2021-07-22
小哥白尼(神奇星球)(2021年4期)2021-07-22
航天工业管理(2020年9期)2020-12-28
汽车与安全(2020年1期)2020-05-14
中国外汇(2019年19期)2019-11-26
新高考·高一物理(2017年7期)2018-03-06