基于无线传感网络的无人机喷药沉积效果检测
2019-12-22 08:25郭树强赵红茹
农机化研究 2019年5期
黄 蕊 ,郭树强 ,赵红茹
(1.承德广播电视大学,河北 承德 067000; 2.河北司法警官职业学院,石家庄 056004)
0 引言
病虫草害是农业生产过程中的一个严重威胁,会给农作物造成巨大的产量损失。以我国最主要的粮食作物水稻为例,每年因病虫草害损失的产量占总产量的15%~40%[1-2],导致水稻产业的可持续发展受到严重制约[3]。因此,在农业生产过程中加强对病虫草害的防治具有很大的现实意义。
针对不同有害生物的防治手段各异,通过喷洒农药进行化学防治是较为通用的方法。植物保护中的农药喷洒作业劳动周期长,强度较大,对实效性也提出了很高的要求[4]。目前,农药喷洒主要采用人工喷施、地面机械喷施和航空喷施3种方式。人工喷施是传统方法,存在劳动强度大和效率低的问题,难以应对病虫草害突发和爆发的局面,且不利于操作人员的身体健康;地面机械喷施的效率相对较高,但作业成本高,药剂利用率低,还会损伤农田的土壤环境[5];航空喷施是新型的作业方式,克服了前两种方式效率低和农田损伤问题。随着各型农业飞行器的推广普及,航空喷施不再受到作业成本的制约,成为当前最为理想的农药喷洒方式[6]。
航空喷施最常用的载具为无人机,即由无人驾驶飞行器、控制站和其它部分组成的系统。无人机又包括固定翼和旋翼两种,后者具有垂直起降的能力,机动性较强,能够在空中悬停、升降和大幅度转弯,适合进行各种农业生产作业。旋翼无人机已经广泛应用于农药喷洒、信息监测及农业保险勘察等方面,推动了农业现代化和智能化的进程[7-9]。
农药喷洒是无人机在农业中最主要的用途,美国和日本都较早研发出了多个植保无人机型号,处于世界领先水平。我国的植保无人机研发在近年来步入新阶段,生产企业达到上百家,机型数量和推广速度增加明显[10]。另外,研究人员还对喷药相关设备进行了改良,如茹煜等设计了无人机静电喷雾整体系统,相比非静电喷雾,能够显著提高雾滴的沉积效果[11]。
在关于无人机喷药的防治效果中,雾滴沉积和分布特性是研究的重点。雾滴沉积对防治效果有重要影响,也是设置无人机作业参数的参考依据。研究表明:无人机作业的速度、高度和旋翼下方风场是雾滴沉积效果的影响因素,对它们之间相关性的研究有利于提高防治效果[12-13]。目前,对雾滴沉积效果的检测和评价方法有多种,如张瑞瑞等基于变介电常数电容器原理和传感器技术设计的地面实时监测系统[14],张宋超等设计的计算流体动力学模拟方法等[15]。
随着科学的进步,许多新型技术如大数据、物联网和无线传感网络等在农业领域得到应用,提升了无人机的智能化水平。无线传感网络是一种网络通信技术,以嵌入式和传感器技术为基础,应用领域广阔。无线传感网络包含大量智能传感器,利用无线通信实现对目标信息的获取。无人机受体积限制,布置线路会浪费宝贵的空间和载荷,因此适合无线方式通信。无人机可以成为无线传感网络的理想平台,二者结合将获得广阔的应用前景[16]。
目前,无线传感网络在植保无人机上的用途仅限于对航线的控制,而在关乎防治效果的雾滴沉积检测上还没有充分发挥作用,对这一方面进行深入研究将有助于推动雾滴沉积效果检测方法的变革。本文基于无线传感网络,设计了一种无人机喷药的雾滴沉积效果检测系统,并对各种因素影响下雾滴沉积检测的准确性进行了分析评价,以期为拓宽无线传感网络的应用范围提供依据。
1 材料与方法
1.1 仪器设备
喷洒农药的植保无人机选用零度智控智能科技有限公司的“守护者Z-10”型4旋翼无人机,如图1所示。

图1 试验机型
该型机身材料为高强度碳纤维,具有自动避障功能,采用GPS差分精准定位,主要性能参数如表1所示。

表1 无人机的性能参数
“守护者Z-10”具有常规的一键起降和航路规划功能,安装大数据系统,喷洒数据可以连入云服务器,并预留连入无线传感网络的接口。无人机的整体性能已经在新疆、黑龙江、海南、云南、四川等地区进行了测试,证明了持久性和防水性。
无人机配套多种可拆卸的药箱,可减少换药间隔的等待时间,连续作业效率较高。喷头采用独创的双滤网设计,可防止药液杂质和颗粒堵塞,且适配多种口径,能满足对不同作物喷洒的需求。无人机由北斗卫星导航定位,具有较高的平面和高程精度。地面站提供作业航路轨迹及风场采样点和雾滴采样点的坐标,并获取作业参数。
无线传感网络包括传感节点、汇聚节点和控制中心3个部分,作用包括航线的控制、采样点定位,以及对无人机飞行速度、高度和下方风场数据的采集。传感节点由无人机搭载的各型传感器组成,如XV-8000CB型速度传感器用于采集飞行速度,BA5803型气压高度传感器用于测量飞行高度,中科能慧NHFS47型风速传感器用于测定每个采样点处的风速。汇聚节点是CC2530型芯片,与传感节点之间采用ZigBee技术进行无线连接,与控制中心之间采用UART接口进行有线连接,以便将数据上传。控制中心位于地面站,由联想X3550M5型服务器、数据存储库和地理信息库等部件组成。
1.2 试验方法
2017年,在某水稻种植基地中进行试验。水稻采用人工移栽,处于抽穗扬花期,平均株高为95cm,喷洒的药液用水代替。水稻试验田块近似长方形,长度约60m,宽度约35m。以5m为无人机的标准喷幅,根据田块的形状规划出航路,用虚线表示。根据田块的面积设置30个均匀分布的采样点,田块的长度和宽度上相邻两个采样点之间的距离分别为10m和7m,用黑色三角形表示,如图2所示。
无人机按照规划的航路飞行,同时进行农药喷洒作业。设置4个作业速度,由慢到快依次为2、4、6、8m/s;另外,设置4个作业高度,依次为低(0.5m)、较低(1.0m)、较高(2.0m)和高(4.0m)。每次作业中,在各个采样点分别放置1张瑞士先正达公司的雾滴测试卡,位于水稻植株75cm高度的位置,用于沉积药液的收集和检测。
每次作业完成后,取回各采样点的测试卡干燥后密封。测试卡本底为黄色,遇水后变为蓝色,经过扫描得到的图像用DepositScan V1.2软件分析处理,可以得到雾滴覆盖率、覆盖密度和沉积量信息。本研究选用平均沉积量和沉积均匀性来反映药液的沉积效果,其沉积均匀性由所有采样点上雾滴沉积量的变异系数(CV)来衡量。

图2 无人机的航路规划和采样点设置
2 结果与分析
雾滴在无人机不同飞行速度和高度下的沉积量,如表2所示。相同速度下,随着飞行高度的增加,雾滴沉积量逐渐减少;相同高度下,随着飞行速度的增加,雾滴沉积量也逐渐减少。因此,无人机的飞行速度和高度对雾滴沉积量有着相似的影响,飞行速度对雾滴沉积量的影响大于飞行高度。
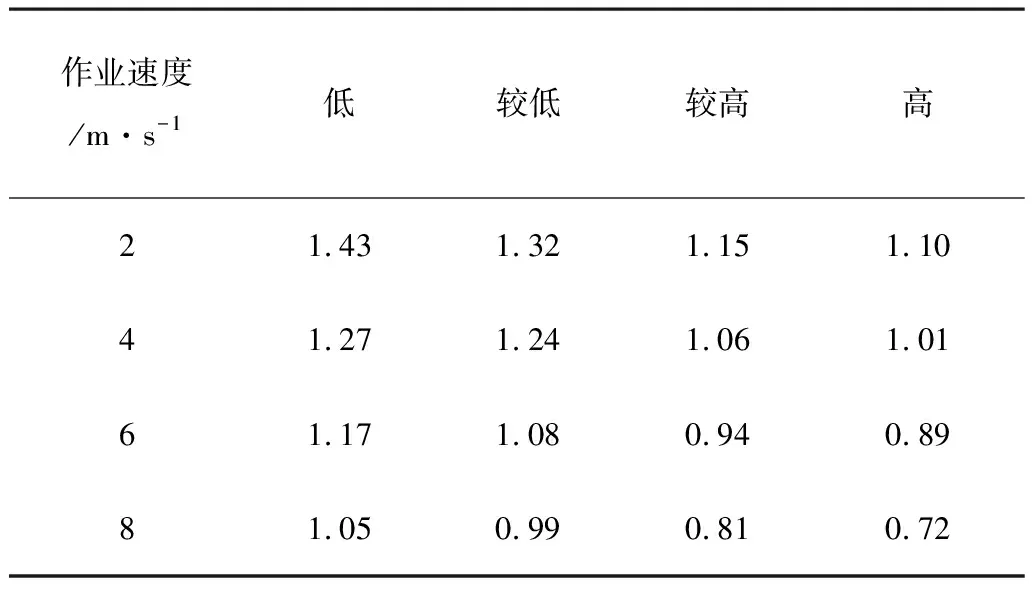
表2 不同作业速度和高度下的雾滴沉积量
雾滴在无人机不同飞行速度和高度下的沉积量变异系数如表3所示。变异系数越大,说明均匀性越差,相同的速度下,随着飞行高度的增加,雾滴沉积量变异系数的增幅很小;相同的高度下,随着飞行速度的增加,变异系数显著增加均匀性变差。因此,雾滴沉积量变异系数主要受到无人机飞行速度的影响,所受飞行高度的影响不明显。

表3 不同作业速度和高度下的沉积量变异系数
3 讨论与结论
基于无线传感网络,设计了一种无人机喷药的沉积效果检测方法,利用无线传感网络进行无人机航线控制,实现采样点定位及对无人机飞行速度、高度和下方风场数据的采集。试验结果表明:飞行速度和高度对雾滴沉积量有相似的影响,速度对雾滴沉积量的影响大于高度;雾滴沉积均匀性主要受到飞行速度的影响,所受飞行高度的影响不明显。
影响雾滴沉积效果的因素有多种,飞行速度和高度是两个重要方面。分析上述结果发现:速度越快时,无人机下方的风场越强,增加了雾滴飘散的不确定性,从而导致沉积量降低,均匀性变差;飞行高度增加时,雾滴下落的距离变长,只会对沉积量造成影响,这些结论与其它学者的研究一致[13]。因此,该无人机喷药的沉积效果检测方法具有较高的准确性,可为拓宽无线传感网络的应用范围提供依据。
猜你喜欢
信息记录材料(2022年3期)2022-05-17
今日农业(2021年13期)2021-11-26
热带作物学报(2021年1期)2021-02-22
农家参谋(2020年6期)2020-07-29
无人机(2019年10期)2019-12-17
科技信息·中旬刊(2018年9期)2018-10-21
航空模型(2016年10期)2017-05-09
航空模型(2016年5期)2016-07-25
百科探秘·航空航天(2015年12期)2015-11-07
青年文摘·上半月(1983年5期)1983-01-01