多层矫正式大蒜播种机矫正机构性能分析
2019-12-22 08:24秦婷婷王存鹏吕宝君张倩瑜张清博胡彩旗
农机化研究 2019年5期
秦婷婷,王存鹏,吕宝君,匡 军,张倩瑜,张清博,胡彩旗
(青岛农业大学 a.机电学院;b.科技处,山东 青岛 266109)
0 引言
我国是大蒜种植大国,大蒜是我国在国际市场上极具竞争力的农产品,也是我国重要的经济作物和出口产品,用途较为广泛,需求量较大。大蒜的种植主要集中在山东、江苏、安徽、河南和陕西等地。目前,我国大蒜种植面积约为75万hm2,约占世界总种植面积的71%[1-3]。
大蒜种植对于直立性要求较高,为了保证大蒜播种成活率和大蒜产量,蒜瓣入土后鳞芽朝上是必要条件。但是,由于蒜瓣的不规则外形导致在大蒜机械化播种过程中的直立性很难保证。由于上述这种局限性,目前我国大蒜的种植大多采用手工种植,劳动强度大、成本较高、效率较低,故大蒜的精准定向播种是实现大蒜机械化和自动化播种的关键,对于减轻蒜农的劳动强度、增加其收入具有重要意义[4-7]。
本文通过对大蒜外形尺寸进行多组测量获得大蒜蒜瓣的统计学外形尺寸,设计了大蒜精准定向播种机构,并基于试验设计、三维建模软件和三维仿真软件等技术和方法提出可使大蒜鳞芽朝上并保证其播种直立度的多层矫正装置。试验数据分析和仿真分析结果表明:该装置是可行的,能够满足大蒜播种蒜瓣入土鳞芽朝上的农艺要求。
1 播种机关键结构设计
1.1 大蒜种子外形尺寸测量
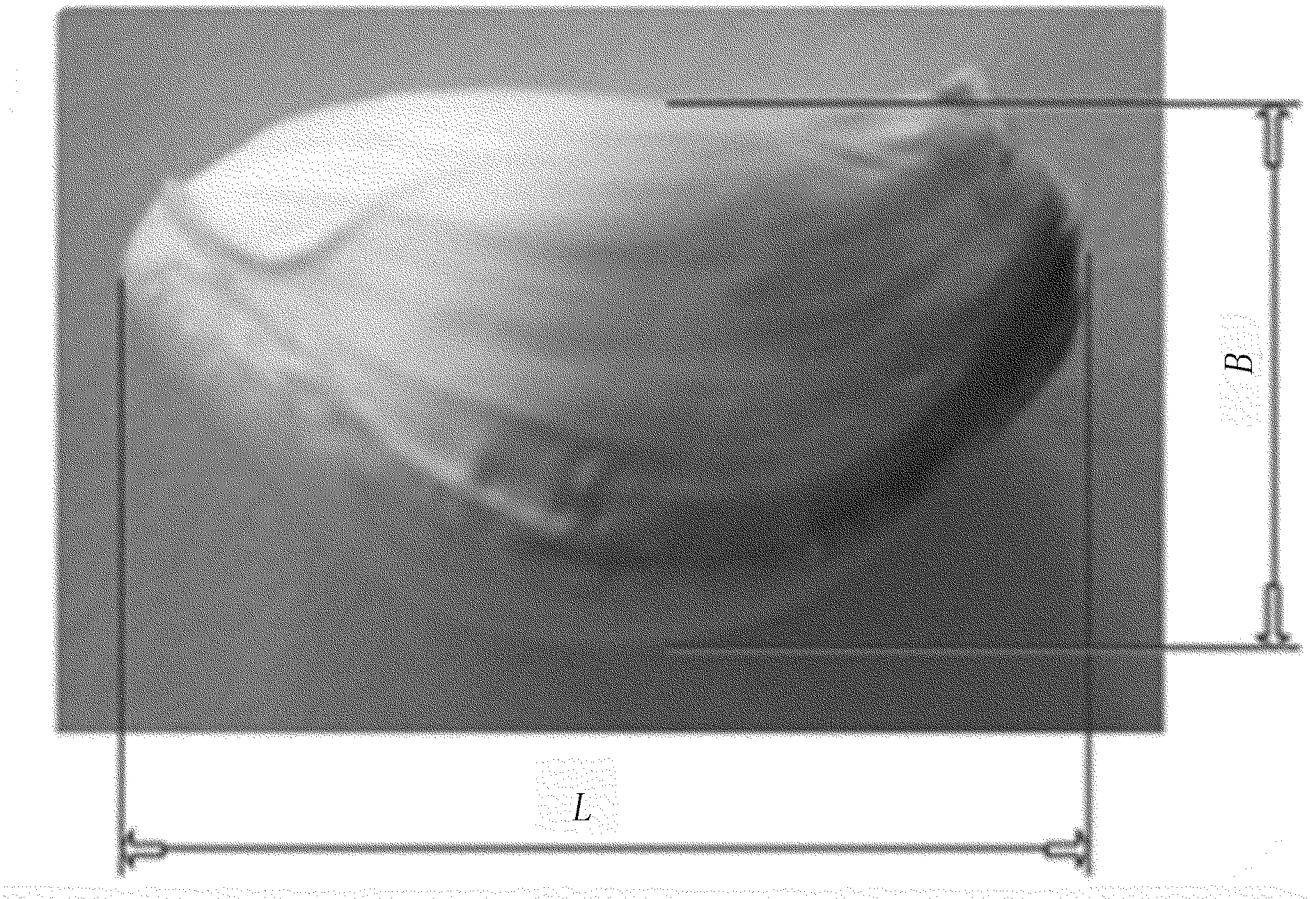
从大蒜种子中随机挑出100个进行外形长度、宽度和高度尺寸的测量,如图1所示;测量结果如表1所示。
(a)

(b)

变量长L/mm宽B/mm高H/mm质量M/g个数100100100100平均值33.9518.2521.176.78最大值38.322.724.18.77最小值29.212.416.2 4.8
由测量数据可知:大蒜外形尺寸的最大值分别为L=38.1mm,B=22.7mm,H=24.1mm,根据以上数据确定取种勺的直径为45mm,排种管的直径为50mm。
1.2 排种勺设计
在一个辊子上设置多排取种勺,由取种勺的尺寸可以保证每个勺子每次只取一个蒜瓣,以达到单粒播种的目的。排种辊和排种勺外形如图2所示。

图2 排种辊和取种勺
1.3 施肥装置设计
对于一个机器来说,在播种机构之前有一个完善的施肥装置是很有必要的。施肥装置主要由肥料箱、排肥轴、外槽轮式排肥器、排肥管和开沟器等组成。施肥装置的动力由地轮通过链传动提供。肥料箱安装在施肥装置的上方,在每一行的中心位置设置一个开沟器,通过调节排肥槽轮的工作长度调整施肥量的大小;并将一定量的肥料排进输肥管中,通过输肥管,肥料落入开好的沟中,完成施肥。施肥装置如图3所示;排肥槽轮如图4所示。
为了精量控制排肥量,外槽轮式排肥器的排量q计算公式为
式中q1—排肥器每转凹槽排肥量(g);
q2—排肥器每转凹槽外带动的排肥量(g);
d—外槽轮直径(mm);
L—外槽轮工作长度(mm);
γ—肥料容重(g/L);
n—排肥轴转速(r/min);
α(n)—肥料对排肥凹槽的充满系数,一般取0.6~0.75;
f—每个凹槽的面积(mm2);
t—每个凹槽的节距(mm);
cn(n)—凹槽外带动层特性系数,与转速有关。
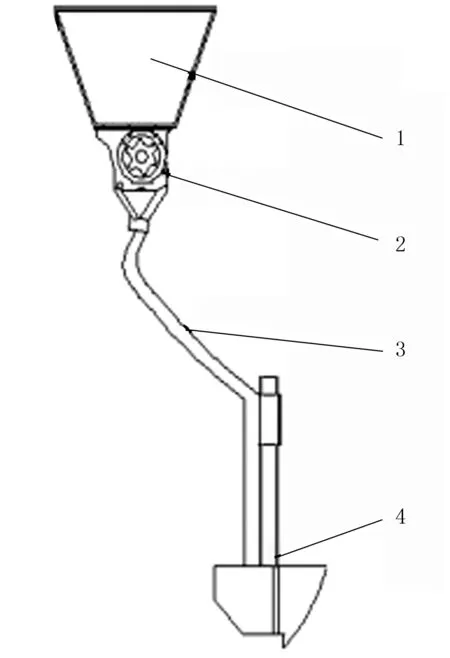
1.肥料箱 2.旋转排肥槽轮 3.输肥管 4.开沟器
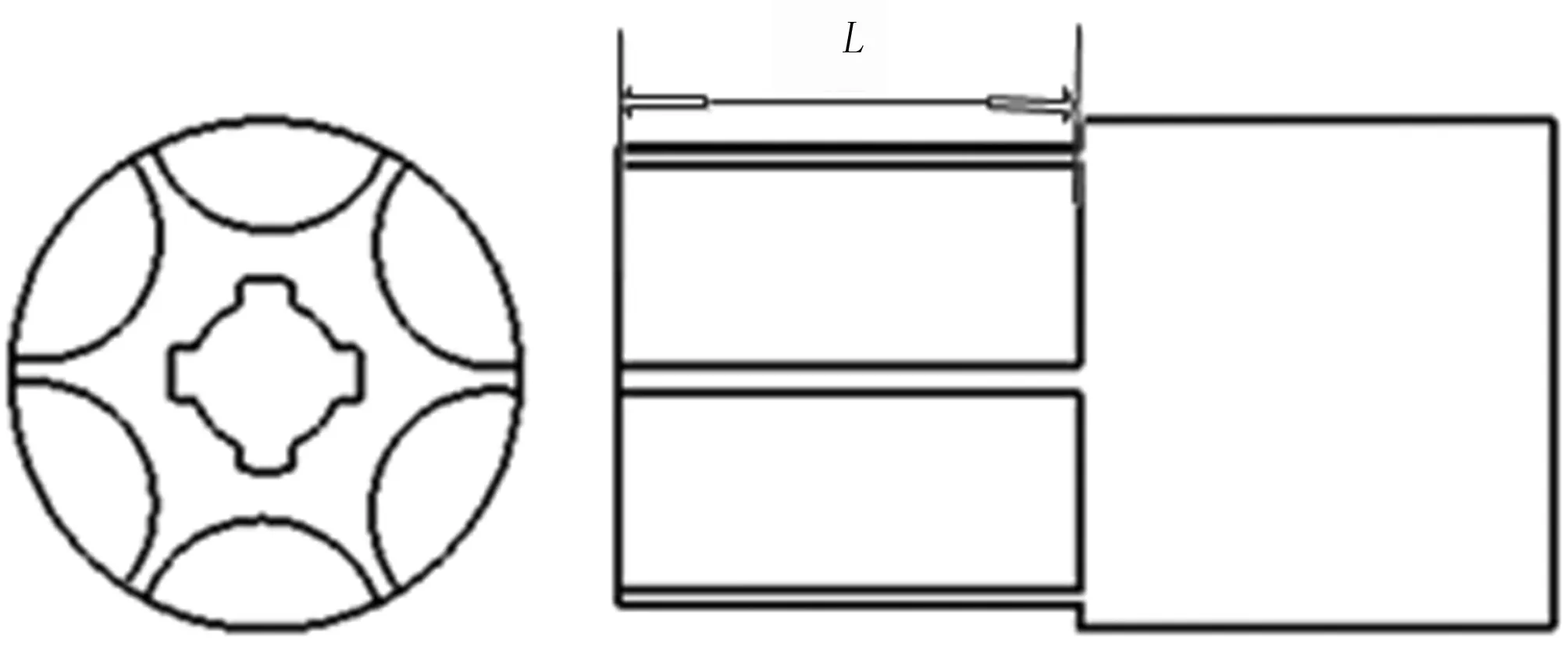
L.槽轮工作长度
1.4 矫正装置设计
采用铁皮制作锥形小碗,模拟蒜瓣平躺、鳞芽朝上、鳞芽朝下3种下落状态,以通过锥形矫正碗矫正后鳞芽朝上为达到矫正目的,通过多次试验发现:当自由下落的蒜瓣掉入到具有一定角度的锥形小碗中时,蒜瓣会依靠自身重力和重心位置在下落过程中调整其状态;通过多次改变锥形矫正小碗的锥度发现,当锥度为45°时,鳞芽朝上的蒜瓣最多,矫正率最高。45°锥形矫正碗的结构如图5所示。锥形矫正碗实验数据如表2所示(表2中每种下落姿态下样本容量均为100个)。
整个矫正装置由排种管、V型矫正板、双层锥形矫正碗和鸭嘴组成,蒜瓣从排种管掉落,通过V型矫正板调整蒜瓣的姿态,通过双层锥形矫正碗再对蒜瓣姿态进行两次矫正,以保证蒜瓣矫正率达到98%以上,最后通过鸭嘴种植以保证大蒜种植的精准定向要求。矫正装置的整体结构如图6所示。

图5 锥形矫正碗结构图
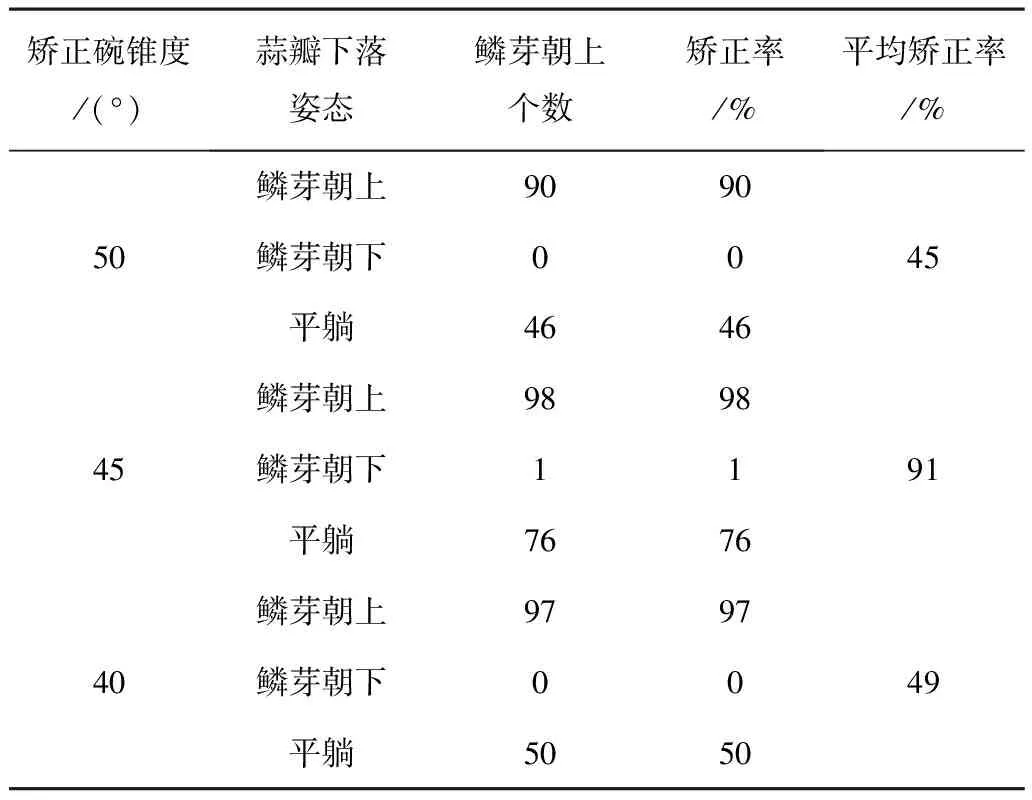
矫正碗锥度/(°)蒜瓣下落姿态鳞芽朝上个数矫正率/%平均矫正率/%50鳞芽朝上9090鳞芽朝下00平躺46464545鳞芽朝上9898鳞芽朝下11平躺76769140鳞芽朝上9797鳞芽朝下00平躺505049

1.凸轮 2.曲柄滑块机构 3.链轮 4.轴承座 5.落料管 6.滑动装置1 7.V形矫正板 8.滑动装置2 9.锥形矫正碗 10.偏心式锥形矫正碗 11.鸭嘴 12.凸轮1 13.滑动装置 14.凸轮2 15.齿轮
由于凸轮传动机构结构简单、制造容易、工作可靠,从动轮运动时间和静止时间可在较大范围内变化,所以V型矫正板和双层锥形矫正碗均采用凸轮机构进行间歇传动。为了达到逐层开合矫正的目的,需要对凸轮的回程长度、安装角度进行设计。矫正装置的开合距离与大蒜的外形尺寸相关,根据表1设置V形矫正器与锥形矫正碗的开合距离不小于25mm,将凸轮的回程展开长度设置为30mm,以满足矫正装置的开合要求。为实现V形矫正器和锥形矫正碗的逐层开合,各凸轮需要错开一定角度安装,驱动V形矫正器的凸轮安装角度和驱动第一层锥形矫正碗的凸轮安装角度错开120°,驱动第一层锥形矫正碗的凸轮和驱动第二层锥形矫正碗的凸轮错开90°。
2 播种机整体结构
2.1 整体结构介绍
该多层矫正式大蒜播种机由播种箱、排肥箱、排肥器、取种勺、开沟器、导种管、凸轮、鸭嘴、中心轴、牵引杆、地轮、链轮、凸轮、覆土器、V形矫正板,以及双层矫正碗等组成,如图7所示。
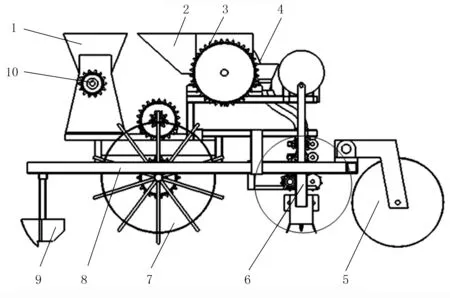
1.肥料箱 2.种子箱 3.链轮 4.排种辊 5.覆土器 6.矫正装置 7.地轮 8.机架 9.开沟器 10.排肥装置
播种箱内部设置有取种勺,其下端连接排种管,排种管下口正对着矫正板,矫正板下面是两层矫正碗装置,矫正碗下面是一个鸭嘴。3层矫正装置分别安装在3个固定支架上,鸭嘴也安装在一个固定支架上,鸭嘴支架两端与滑块机构相连接。开沟器在最前端,开沟器后方为排肥系统,双圆盘式覆土器在整个机构的后面。
2.2 播种机工作原理介绍
该装置主要由拖拉机牵引前进,所有动力从地轮输出。将动力通过链传动以及齿轮传动逐级传递到各个机构。
1)肥料箱将肥料经排肥机构传动到开沟器所开好的沟底,然后泥土自动将肥料覆盖,完成施肥。
2)种箱及排种辊中,种箱中的大蒜由排种辊上自带的排种勺将大蒜挖起,经挡板进行排选,后经设计好的两壁轨道进入输种管;蒜瓣掉到V型板上进行初步调正,再经下面两级锥形矫正碗进行进一步调正,完成之后经插播机构进行大蒜的播种。
3)播种完成之后,由双圆盘式覆土器进行镇压覆盖,覆土器将种子覆盖。
3 基于ADAMS的矫正装置仿真分析
ADAMS软件使用交互式的图像环境和零件库、约束库、力库,创建完全参数化的机械系统模型,可用于对虚拟样机进行运动学、动力学和静力学分析,得出输出速度、位移、加速度和反作用力曲线。
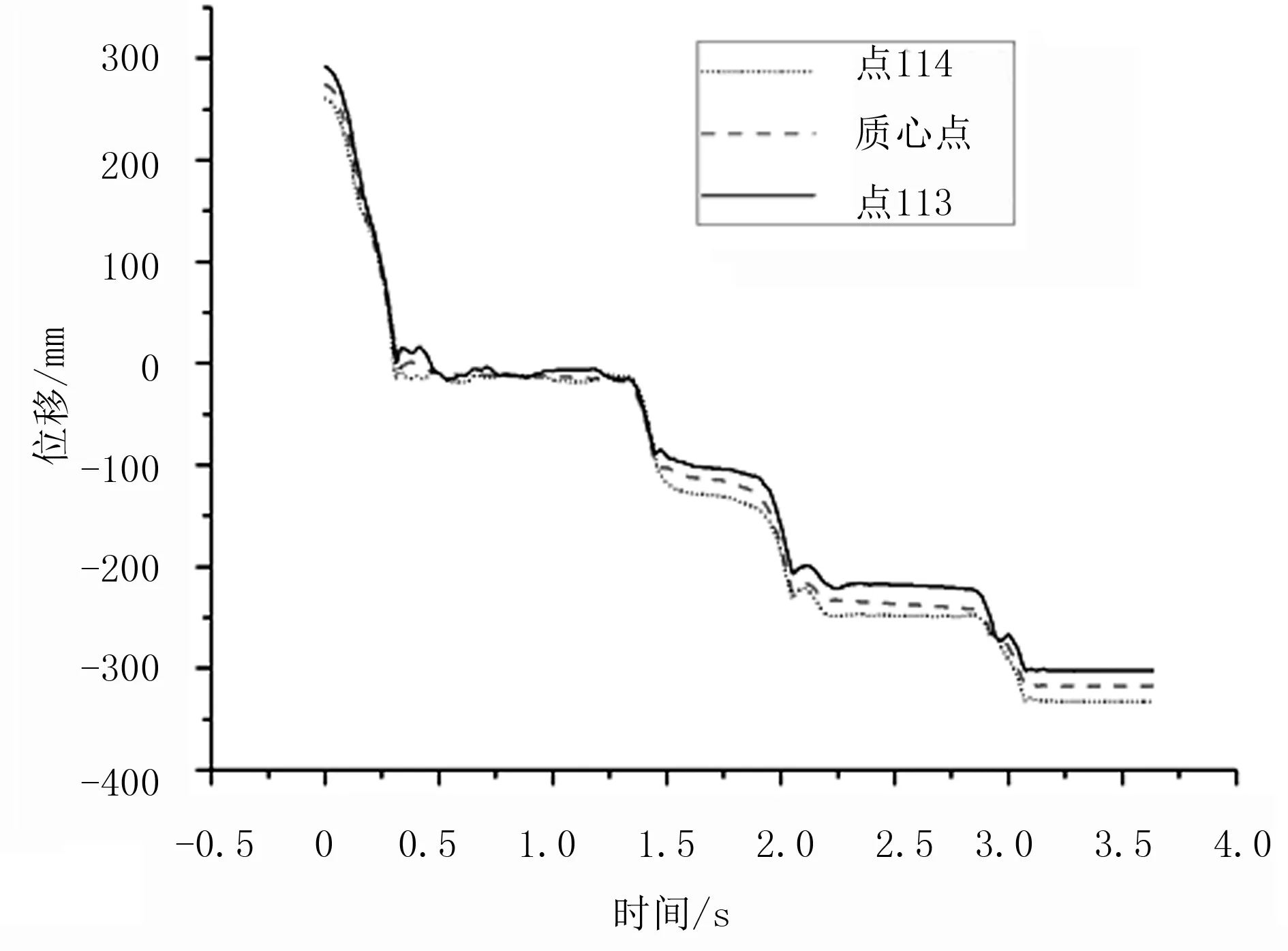
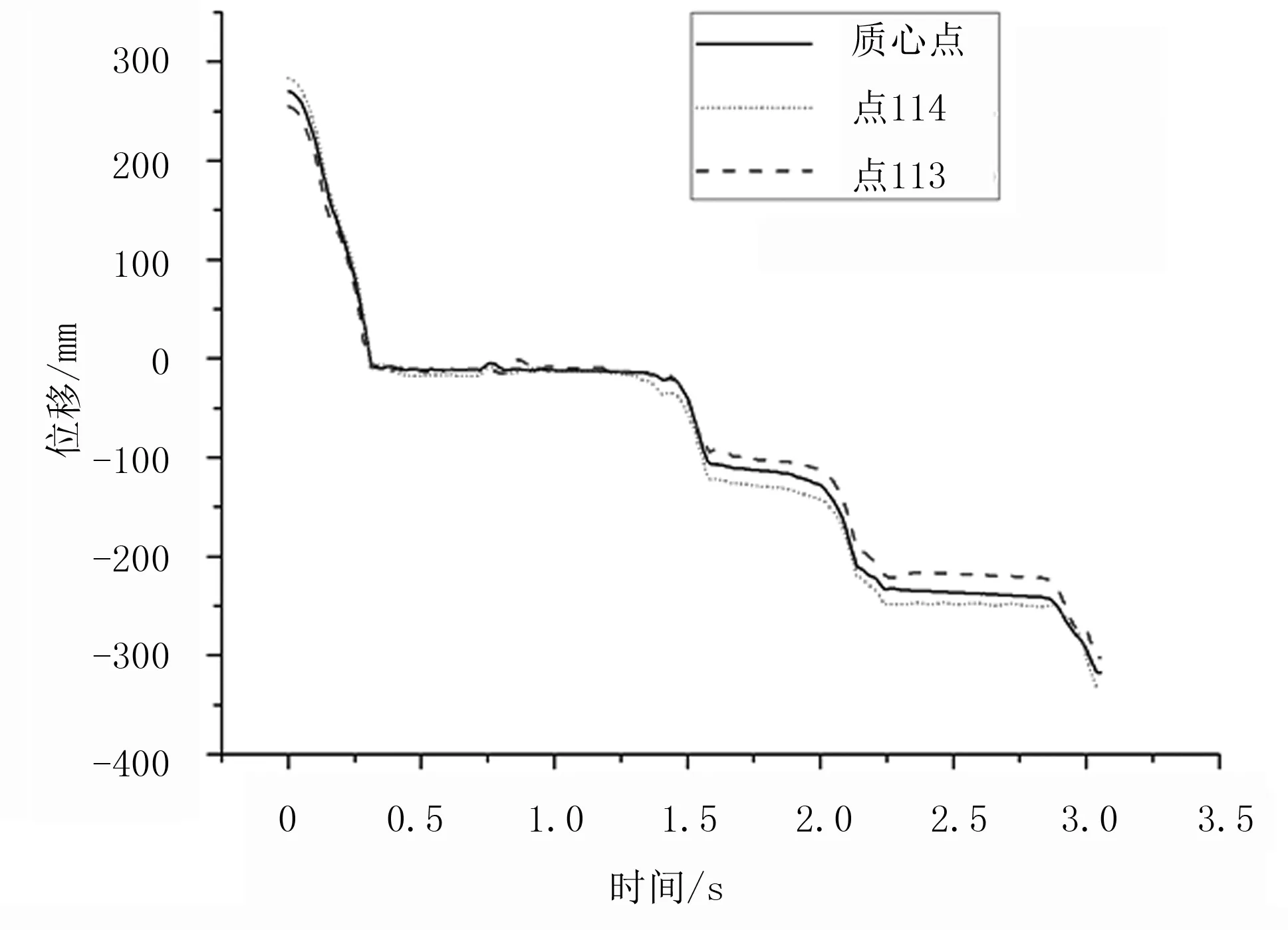
本文中,为了进一步分析矫正装置的性能,采用 ADAMS对矫正机构进行运动仿真。把在SOLIDWORKDS中建立矫正装置的三维模型导入到ADAMS中,并对各零部件添加约束后,对矫正装置进行运动仿真,设置蒜瓣以不同的形态下落,如平放、鳞芽朝上、鳞芽朝下,以及其他不规律形态;随着蒜瓣逐渐由种箱经排种勺下落,机构的开合主要由凸轮机构进行控制,进行仿真,导出蒜瓣质心随时间变化的运动轨迹曲线。为便于获取蒜瓣在下落过程中的姿态变化,在蒜瓣的两端各建立一个标记点113(鳞芽部)和114(根部),标记点位置如图8所示。蒜瓣以不同形态下落时质心点以及所标记点随时间变化的运动轨迹曲线如图9所示。其中,(a)为蒜瓣平放,(b)为蒜瓣鳞芽朝上,(c)为蒜瓣鳞芽朝下。

图8 蒜瓣标记点
蒜瓣开始下落时相对矫正机构的位置如图10所示。蒜瓣下落初始位置为距离排种管上端向上8cm,图9纵坐标中的位移0点位置为距离排种管下端向上2.5cm,即矫正机构导入ADAMS后生成的坐标原点,其坐标位置如图10所示。

(a)
(b)
(c)
由图9可以看出:蒜瓣在下落过程中发生多次碰撞,第1次碰撞发生在V形矫正板上,蒜瓣在掉落到V形矫正板上时质心点曲线与所标记两点的曲线几乎重合,可以判定此时蒜瓣的状态为平躺;第2次碰撞发生在锥形矫正碗中,蒜瓣掉落在锥形矫正碗中时质心点曲线处在所标记两点曲线的中间,标记在鳞芽端的点的曲线在最上方,但曲线距离较近,由此可以判定此时蒜瓣的状态为鳞芽端倾斜朝上;第3次碰撞发生在偏心式锥形矫正碗中,蒜瓣在掉落在偏心式锥形矫正碗中时质心点曲线处在所标记点曲线的中间,标记在鳞芽端部的点的曲线在最上方,可以判定此时蒜瓣的状态为鳞芽端朝上。即多层矫正装置将蒜瓣调整为鳞芽朝上的状态。

1.大蒜 2.坐标原点 3.矫正机构
4 结论
在大蒜播种过程中,为了保证播种质量和大蒜产量,要求蒜瓣入土后鳞芽朝上。本文针对这个问题提出了多层矫正式大蒜播种机结构,以蒜瓣鳞芽朝上、鳞芽朝下、平躺3种典型下落姿态为主,分别以100个蒜瓣的样本容量,试验统计和分析了3个锥度的锥形矫正碗对各姿态蒜瓣的矫正规律,并运用SolidWorks软件对该机构进行建模,基于ADAMS软件对主要矫正部件进行运动仿真获得大蒜播种过程中的蒜瓣运动轨迹曲线。通过对质心点和两端标记点运动轨迹的对比分析表明:蒜瓣在通过多层矫正装置的过程中由于矫正装置对其多次矫正,保证了蒜瓣鳞芽朝上的要求。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
口腔医学(2021年10期)2021-12-02
农业与技术(2021年21期)2021-11-17
果农之友(2021年4期)2021-06-29
昆明医科大学学报(2021年1期)2021-02-07
天津农林科技(2020年5期)2020-10-21
创新作文(5-6年级)(2017年9期)2018-07-06
创新作文(5-6年级)(2017年8期)2018-07-06
课堂内外(小学版)(2016年12期)2017-01-11
小星星·作文100分(2009年4期)2009-06-05