采用时间序列突变点检测的滚动轴承性能退化评价方法
2019-12-21 02:50:02刘弹李晓婉梁霖吴杰徐光华沈强
西安交通大学学报 2019年12期
刘弹,李晓婉,梁霖,吴杰,徐光华,沈强
(西安交通大学机械工程学院,710049,西安)
随着机械设备逐渐向大型化、高速化和智能化发展,设备零部件之间的联系越来越紧密。一旦某零部件失效,就可能导致整台设备损毁。若能在零部件失效之前定量评价出其性能退化程度,就可以有针对性地进行主动维修,避免恶性事故的发生。因此,开展机械设备零部件性能退化评价对提高生产效益和保障人身安全具有重要意义。
性能退化评价与预测的关键在于寻找到与其相适应的特征提取方法、敏感的特征指标和有效的性能退化评价与预测模型[1]。Wang等[2]应用局部线性嵌入(LLE)算法提取高维特征集的低维本征流形特征,利用模糊C均值聚类模型评价轴承当前性能退化状态。肖婷等[3]利用局部保持投影算法(LPP)对多域高维特征集进行维数约简,将维数约简后的特征向量作为最小二乘支持向量机(LSSVM)的输入,完成退化趋势预测。Qin等[4]通过局部均值分解(LMD)和主成分分析(PCA)提取特征向量,将其输入基于分段投票算法和LSSVM的模型中,完成了列车滚动轴承性能退化评价。Gao等[5]将形态腐蚀算子引入数学形态颗粒分析(MMP),提出了广义数学形态颗粒分析(GMMP),在此基础上,以GMMP和信息熵为理论基础,提出了一种基于广义模式谱熵(GPSE)的退化特征提取方法。Chen等[6]提出了一种基于距离评估技术(DET)的混合域特征提取方法,以提取的退化特征矩阵作为支持向量机(SVM)的输入,对退化状态进行识别。Zhao等[7]提出了一种深度特征优化融合方法,从增强型自动编码器(EAE)处理后的降级特征中选取各模块的最小量化误差(MQE)用作候选退化特征,对其进行加权融合以获得最佳退化轨迹。
以上方法所提取的性能退化特征虽然可以从某个方面反映性能退化过程,但是并没有形成一个具体有效的评价方法来指导性能退化特征的提取。为此,本文定义了性能退化特征的评价方法,该方法由初始退化点、初始敏感性、失效突变性和趋势一致性4个指标构成,并设计了性能退化特征评价的定量化指标,且利用时间序列线性突变点检测的方法给出了评价指标的计算过程,为性能退化特征的选取提供了依据。通过Swiss数据集和滚动轴承加速寿命试验,验证了该评价方法和自适应LLE算法的有效性。
1 性能退化特征评价
滚动轴承的性能主要有摩擦、磨损、润滑和温升等,表现为滚动轴承摩擦力矩、振动、噪声和温度等指标,因此发展出振动信号分析、声发射信号分析、油液分析、温度监测、红外监测、超声监测、润滑状态监测和光纤法等状态监测方法[8]。振动信号分析是滚动轴承状态监测方法中使用最广泛的方法。滚动轴承在表面受损、退化直至失效的过程中,会形成规律性的脉冲激励信号[9],但信号中的有效信息需经复杂处理方能提取。
振动监测一般是在所关心的关键部位布置传感器,应用数据信号采集卡获得信号,再利用计算机进行数据计算和分析。常用的传感器包括加速度传感器、速度传感器和位移传感器,其中后两种传感器设计比较冗繁,且增加了制造成本,因此实际使用中多采用压电式加速度传感器。
1.1 性能退化曲线
性能退化是通过设备零部件运行状态的变化表现出来的。性能退化主要表现为4种状态:正常状态、初始退化状态、深度退化状态、失效状态。性能退化曲线可以用关于时间t的函数表达,其状态量是从各个时间点监测信息中提取的特征值,如图1所示。

图1 性能退化曲线
1.2 性能退化特征评价方法及指标
为了有效评价性能退化特征,需要明确性能退化特征的变化趋势是否在整体上或分阶段地保持一致,曲线在变化过程中是否能够识别退化状态的起始点和终止点。由此,定义包含4个指标的性能退化特征评价方法。
(1)初始退化点:指性能由正常状态开始发生背离的时间点,强调发现异常的时间先后。
(2)初始敏感性:指性能从正常到失效状态过渡过程中初始阶段的刻画能力,此时强调捕捉从正常到异常微小变化的能力。
(3)失效突变性:指性能从正常到失效状态过渡过程中结束阶段的刻画能力,强调识别异常到失效状态剧烈变化的能力。
(4)趋势一致性:指性能从正常到失效状态整个过程变化趋势的刻画能力,强调变化趋势满足单一方向变化的能力。
4个评价指标的示意图如图2所示。

图2 4个评价指标的示意图
由图2可知:阶段①曲线a比b更早发生变化,表示a比b对初始退化更加敏感;阶段②a比b的变化幅度大,说明a的初始敏感性更好;阶段③反映变化趋势的走向始终保持一致,说明其趋势一致性较好;阶段④a在临近失效时变化较为缓慢,b则在很短的时间内发生突变,说明b的失效突变性较好。
假设初始退化阶段的起始点为t1,终止点为t2,深度退化阶段的起始点为t3,失效突变点为t4,失效的终止点为t5,对应的特征值分别为y1、y2、y3、y4、y5。定义性能退化特征评价指标如下。
(1)初始退化点评价指标。性能退化特征开始背离正常状态的时间点为t1。在样本数量相同的情况下,初始退化点可以用t1时刻该性能退化特征采集到发生背离的样本数n1来表示。
(2)初始敏感性评价指标。设备性能开始退化时,性能退化特征曲线不再平稳,而是呈一定的上升或下降趋势。因此,采用初始退化过程的斜率来表示正常状态发展趋势第一次发生变化的明显程度,即初始敏感性
(1)
式中:y2为初始退化阶段终点的特征值;y1为初始退化阶段起点的特征值;t2为初始退化阶段结束的时间;t1为初始退化阶段开始的时间。
(3)失效突变性评价指标。性能由深度退化状态演变至失效状态时急剧变化的程度,即为失效突变性。其斜率可能会非常大,甚至趋于无穷,因此不能直接用斜率作为评价指标,而选用斜率的倒数来评价失效突变性
(2)
式中:y5为失效阶段终点的特征值;y4为失效突变点的特征值;t5为失效阶段结束的时间;t4为失效阶段开始的时间。
(4)趋势一致性评价指标。性能退化特征要求在整体上保持一致或分阶段地保持一致。当各阶段的斜率符号一致时,说明该性能退化特征曲线的趋势性在整体上是保持一致的。定义趋势一致性评价指标
(3)
式中:y3为深度退化阶段起点的特征值。
1.3 时间序列线性化突变点检测
性能退化特征曲线本质上是一个时间序列,各阶段起止点在曲线上相当于转折突变点。要实现性能退化特征指标的计算,首先需要建立特征值与时间点之间的线性回归方程,然后将变量代入回归方程中求解回归系数,通过F检验逐步剔除检验不通过的变量,最后保留所有显著变量。
(1)线性回归方程的建立。时间序列Yt=[y1,y2,y3,…,yn],对应时间点1到n,它们将时间序列划分成n-1个小区间,在每个小区间内构建一次线性函数
(4)
式中:ai0、ai1(i=1,2,…,n-1)为线性函数的系数。
为便于参数估计,引入线性半截多项式
(5)
式中:r为时间取值区间的节点。
将式(4)转换成如下形式
(6)
式中:b1、b0、cj(j=1,2,…,n-1)为多项式系数;rj(j=1,2,…,n-1)为时间区间的右端点。
重新设置自变量,令
(7)
则式(6)可以写成线性回归形式
(8)
由此便得到了时间序列的线性回归方程。
(2)显著变量计算。将性能退化特征值及其对应时间点带入回归方程求解回归系数,然后对所有回归系数进行F检验,并剔除低于显著性水平阈值Fα的F最小值,直到回归方程中所有回归系数对应的F值都大于临界值。将保留的显著变量在时间序列上标出,结合性能退化曲线的一般变化规律选择最合适的状态变化起止点。该方法的计算过程如图3所示。
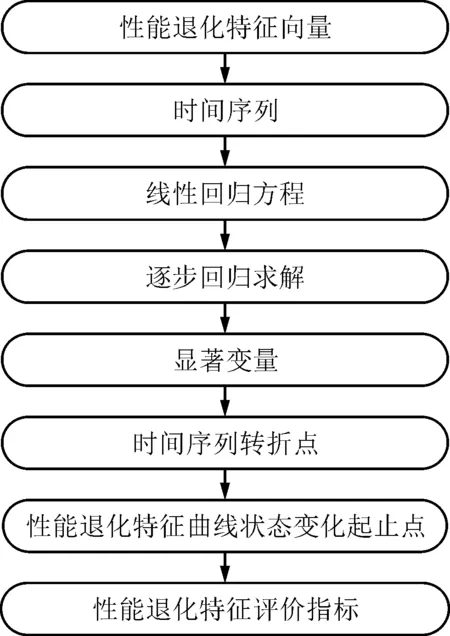
图3 评价指标计算流程
2 自适应局部线性嵌入算法
2.1 局部线性嵌入(LLE)算法
LLE算法是一种局部非线性降维算法,它假设数据样本来自一个潜在的流形,每一个样本与其相邻样本所形成的局部区域是线性的。利用邻域样本线性重构该样本以获取重构权值向量,则该向量中保存了高维数据的局部结构信息。在此基础上,利用重构权值向量在低维空间嵌入样本,保证降维前后近邻样本之间的结构不变,通过局部线性的叠加,不断逼近全局的非线性[10]。局部线性嵌入算法的实现可以分为3步,其过程如图4所示。
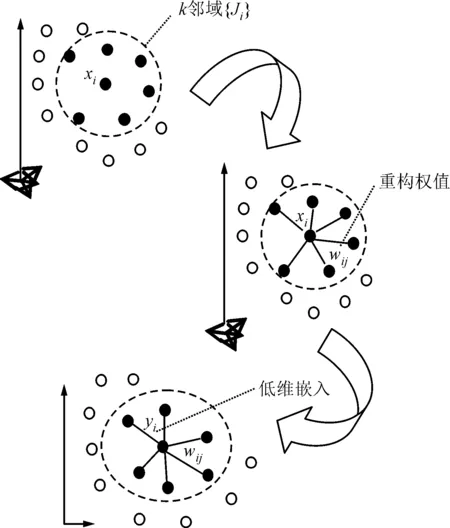
图4 局部线性嵌入算法实现过程示意图
2.2 局部线性嵌入(LLE)算法的不足
LLE算法由于参数少,邻域参数k值的选取对特征提取效果的影响非常大。常规的LLE算法采用全局统一的k值,这对机械信号中大量存在的非线性流形显然是无法处理的,因为对于非均匀的数据样本,其周围样本的稀疏程度不一致,如图5所示。
2.3 邻域参数自适应选取LLE算法
邻域参数自适应选取的最终目的是保证线性重构得到的重构权向量更准确地反映高维空间中各样本局部的空间位置关系。合适的邻域参数能够使样本xi与它的邻域样本组成一个局部(近似)线性块。在线性块内,不仅xi可以由邻域样本线性重构,而且线性块内的其他样本都可以由剩下的样本线性重构。采用k+1个样本的最小重构误差方差反映各样本重构误差的变化大小,方差越小,各样本重构误差越接近,k+1个样本近似位于某个局部线性块上。退化特征提取方法的实现过程如图6所示。


图6 基于自适应LLE算法特征提取流程图
基于以上思路,可以确定邻域参数自适应选取的步骤如下。
步骤1:给定邻域参数的选取范围[kmin,kmax](一般k的范围取2~30),对于样本xi,∀k∈[kmin,kmax],构造xi的k邻域
Ωi={xi1,xi2,…,xik},i=1,2,…,n
步骤2:∀k∈[kmin,kmax],构建样本块
步骤3:∀k∈[kmin,kmax],计算样本块内各样本的重构误差
j=0,1,…,k;l=0,1,…,k,l≠j
(9)
步骤4:∀k∈[kmin,kmax],计算样本块内各样本的重构误差方差
(10)
式中
(11)
步骤5:∀xi,最优近邻个数为
(12)
3 实验验证
3.1 自适应LLE算法与常规LLE算法的对比实验
通过比较高维空间和低维空间各样本距离矩阵的相关性,即平均相关系数,可以反映不同算法的降维效果:平均相关系数越大,则降维效果越好,反之则越差。本文采用流形数据集瑞士卷Swiss进行验证。Swiss数据集包含2 000个样本,每个样本都是三维的,其分布图如图7所示。

图7 Swiss数据集样本分布图
分别利用邻域参数自适应LLE算法和常规LLE算法对该数据集进行降维,依次设定k值为5、10、15、20、25、30,低维空间的维数设为2,然后计算各个样本的平均相关系数,结果如表1所示。
由表1可知,常规LLE算法对于取不同k值的降维效果都较差,平均相关系数都只有0.3左右,而自适应LLE算法其平均相关系数大都在0.7左右,达到了较好的降维效果,由此验证了邻域参数自适应策略的可行性。
3.2 自适应LLE降维特征与常规特征评价对比实验
采用美国智能维护系统(IMS)中心提供的滚动轴承加速试验数据。轴承试验装置结构如图8所示,输出轴的转速大约保持在2 000 r/min。在轴和轴承上,通过弹簧机构施加2 721.55 kg的径向载荷。润滑油的温度和流量参数通过油循环系统进行调节。数据采集所使用的传感器类型为高灵敏度式加速度传感器PCB353B33,通过数据采集卡NI-DAQ6062E进行数据采集。在此试验台上一共完成3组从正常运行至失效的试验,以单通道数据采集轴承1发生外圈故障的数据进行验证。

表1 自适应LLE算法与常规LLE算法平均相关系数表

图8 美国智能维护中心轴承试验台结构图
该组数据共包含984个样本,每个样本20 480个点,每次采样时间间隔10 min,采样频率20 kHz,旋转轴的转速为2 000 r/min。轴旋转一周采样点数为600点。截取原始样本上连续的4 096个采样点作为处理样本,可以得到一个4 096×984的试验数据样本集。在此基础上,首先采用db10小波基对每一个样本进行三层小波包分解,得到8个频段的信号,求取每个频段信号的能量,以8个频段的能量组成该样本的特征向量。然后利用自适应邻域参数选取局部线性嵌入算法进行降维,kmax=20,d=1,其结果如图9所示。其中横坐标为样本数,纵坐标为采用自适应LLE算法降维后的特征值。为了统一评价指标计算的数量级,将降维特征进行等比例归一化,如图10所示。

图9 轴承1降维特征

图10 轴承1降维特征等比例归一化
为了与降维特征的评价效果进行对比,提取同组数据的均方根和峭度两个常规特征与之进行比较。等比例归一化后的峭度和均方根特征分别如图11和图12所示。对上述3个特征曲线分别利用时间序列线性化突变点检测的方法计算各性能退化特征的评价指标,结果如表2所示。

图11 峭度等比例归一化

图12 均方根等比例归一化
表2 性能退化特征评价对比表
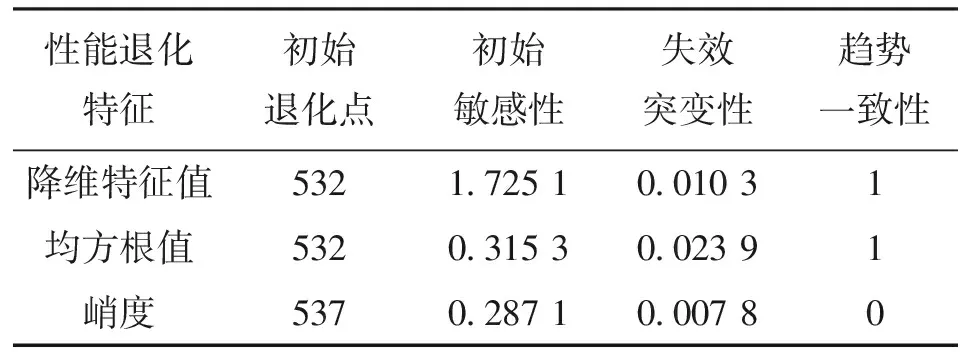
性能退化特征初始退化点初始敏感性失效突变性趋势一致性降维特征值5321.725 10.010 31均方根值5320.315 30.023 91峭度5370.287 10.007 80
首先,从3个特征曲线上的转折点可以看出,这些转折点明显地将性能退化特征曲线划分成了4个阶段,与实际观察结果相吻合。其次,由表2中的评价指标可以看出,降维特征和均方根值都比峭度更早地发现初始退化,而且降维特征的初始敏感性比均方根和峭度的初始敏感性大得多;3个特征的失效突变性均趋近于0,对失效突变均有反映;均方根值和降维特征的趋势一致性指标都为1,而峭度的趋势一致性指标为0,表明前两者趋势一致性较好,而峭度并不具有趋势一致性。综合来看,降维特征对性能退化过程的反映能力要优于均方根和峭度,这也与实际观察结果相符。由此,验证了性能退化特征提取方法的有效性。
4 结 论
本文主要以滚动轴承为对象,从机械设备零部件性能退化特征评价方法和性能退化特征提取方法两个方面进行了深入研究,主要得到以下结论:
(1)利用线性函数检测时间序列转折突变点的方法可以有效捕捉滚动轴承数据各特征在初始退化、深度退化、失效各阶段的起始点和终止点,为性能退化特征的定量化评价提供依据;
(2)性能退化特征评价指标能够有效地评价滚动轴承性能退化特征的变化过程,为性能退化特征的提取提供依据;
(3)与常规局部线性嵌入算法相比,邻域参数自适应局部线性嵌入算法更能保持高位空间数据特征的位置关系,达到更好的降维效果。
猜你喜欢
车主之友(2022年4期)2022-08-27 00:57:12
数学物理学报(2022年4期)2022-08-22 04:08:00
中学生数理化·高一版(2021年2期)2021-03-19 08:32:06
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
海峡姐妹(2019年12期)2020-01-14 03:24:40
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:34
自动化学报(2018年7期)2018-08-20 02:59:04
周口师范学院学报(2016年5期)2016-10-17 06:36:47
计算物理(2014年1期)2014-03-11 17:00:18
燕山大学学报(2014年1期)2014-03-11 15:28:11