
星载铷钟频率漂移修正方法研究
2019-12-20 02:09:22王剑祥张金海陈溶波涂建辉崔敬忠
真空与低温 2019年6期
王剑祥,张金海,陈溶波,涂建辉,杨 炜,崔敬忠
(兰州空间技术物理研究所 真空技术与物理重点实验室,兰州 730000)
0 引言
铷钟具有体积小、质量轻、功耗低、可靠性高以及寿命长的优点,在导航卫星中得到广泛应用[1],但是铷钟作为二级频标,主要存在几个方面的缺点:首先,其频率准确度稍差,比铯钟相差一个数量级(铯钟为10-13量级);其次,铷钟的开机频率复现性不好;第三,其频率漂移率较大,为10-14/d量级(开机阶段和平衡阶段为10-13/d);第四,铷钟长期频率稳定度随着无规噪声的影响而恶化。这些因素都会影响导航卫星的定位精度[2-3]。为了提高星载铷钟的导航应用能力,需要在保证其短期频率稳定度的基础上,降低频率漂移的影响。由于铷钟频率漂移具有非线性特征,采用线性漂移修正方法不能完全达到目的,需要根据铷钟频率漂移的特征开展工作,本文对实际工作的铷钟特征进行具体分析,研究频率漂移修正的方法,以期找到合理的途径,从而充分地发挥铷钟在导航定位中的作用。
1 铷钟漂移的特征
铷钟开机后,其输出频率随时间的变化与具体的设计和环境因素有关,但总的趋势基本相似[4-5]。图1为某星载铷钟开机后输出频率随时间的变化过程,开始阶段频率向正向漂移(漂移率为10-13/d水平),经过约两天以后,漂移逐渐从正向变为负向,趋于稳定漂移阶段(-10-13/d),之后随开机时间的延长,漂移逐渐减小(小系数10-14/d)。铷钟频率漂移对导航和守时的精度影响很大。
如果是线性漂移,对时间精度的影响可用式(1)来表示[6]:

式中:ΔT为时间误差;α为频率漂移率;t为时间校准间隔。
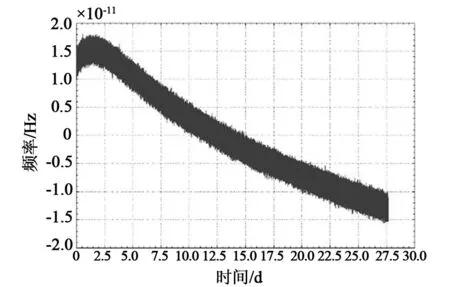
图1 星载铷钟开机后输出频率随时间的变化曲线Fig.1 Frequency curve of rubidium clock on poweron period
由时间误差引起的导航定位误差可以用时差乘以光速来估算,ΔL=cΔT。若取铷钟天漂移典型值为5×10-14/d,按每天校时一次计算,导航定位精度误差估计约为0.65 m。如果将铷钟漂移率修正为5×10-15/d,则其在同等校时间隔内对导航定位精度的影响可以降低一个数量级;在保持同样导航定位精度的情况下校时间隔可以延长两倍以上。时间同步信号如果来自于地面站,需要耗费星地数据链路带宽和通信资源,而且会受到电离层对信号传输的影响。我国的星载铯钟即将搭载升空,将铷钟的频率漂移与星载铯钟的进行比较并加以修正,不仅可以实现精确导航,而且可以借助铯钟长期频率稳定度好和漂移率低的特性,实现长时间的无地面干预自主导航。
在铷钟稳定工作阶段,可以根据铷钟漂移的非线性特征,采用多项式进行频率预估和漂移修正。通常在短时间用二次多项式近似,这时变化趋势可用式(2)表示:

式中:y(t)为t时刻的相对频差;t0为计时起点。设â0、â1、â2为模型参数a0、a1、a2的估计值,可以利用已有ti时刻的测量数据yi进行最小二乘法求出模型参数估计值,并在此基础上进行后期频率预估。计算可用式(3):

也可用矩阵表示:
拟合系数可表示为:

图2显示利用Matlab工具对一个铷钟的测试频率数据进行漂移二次多项式修正的结果[7]。根据频率的变化可以计算出其105s取样时间的Allan方差、Hadamard方差(漂移为-10-13/d)和计时时间为天的时间误差分别为8.8×10-14、5.81×10-15和5.17×10-9s;经频率漂移修正后三者分别为8.29×10-15、5.68×10-15和3.12×10-10s。可以看出,漂移修正后的频率曲线较为平直,计时时间为天的时间误差估计精度提高了一个数量级,有利于提高导航定位的精度。但是这种修正方法会受到频率不规则变化的影响,尤其是在铷钟开机阶段和波动阶段表现比较明显。以图1铷钟为例,经二次项频率漂移修正的结果如图3所示(为了显示明显起见,频率数据进行了垂直整体偏置)。拟合结果剩余频率偏差较大(尤其是初始阶段,表现为拟合曲线不平直),这主要是初期频率漂移变化较大和数值由正变负所引起。为了减小二次多项式修正的偏差,可以采取分段修正的办法,但是在分段处会出现较大的误差。
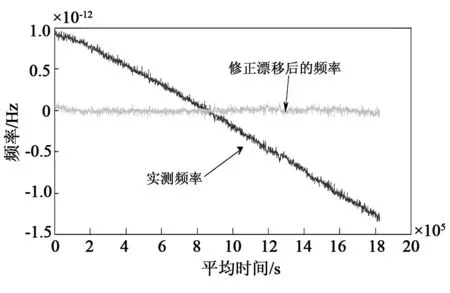
图2 铷钟漂移修正前后频率比较曲线Fig.2 Comparison of frequency of rubidium clock before and after drift correction

图3 铷钟开机和波动情况下的漂移修正效果曲线Fig.3 Drift correction effect of rubidium clock under the condition of start-up and fluctuation
图4给出了在开机后5×105s时分两段二次项拟合结果,可以看出,在分段处拟合曲线有较大波动。同时在拟合曲线两端也有偏离二次项拟合的现象,表现为拟合残差曲线上翘。为了提高精度,可以增加分段值。结合铷钟开机后的频率变化特征,大致分为预热过程、平衡过程和稳定工作过程。这样将漂移补偿过程也分为三段进行。预热过程频率漂移修正时间间隔缩短,以便跟上频率漂移的变化;平衡过程间隔适当延长,以适应导航需求;稳定工作过程频率修正时间可以更长,以保障导航系统的稳定性。但无论如何划分修正时间间隔,在接续点都会出现频率波动,对总体频率变化有较大的影响。考虑到划分越精细,频率修正的量值越小,也可以将分段值设为与测试数据数量相等,随时进行频率修正,这就是Kalman滤波[8]的思想。
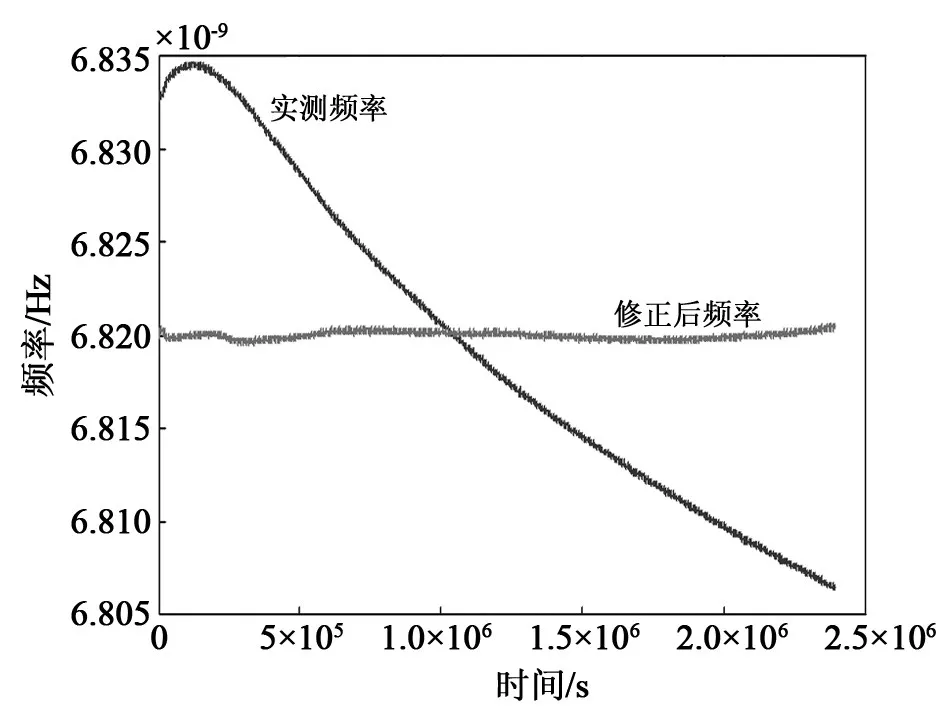
图4 铷钟漂移分段修正效果曲线Fig.4 Subsection correction effect of rubidium clock drift
Kalman滤波的方法是将频率和漂移率作为二维待估计向量x,测量值z为频率偏差,进行最小频率偏差估算和预测。递推公式如式(6):

式中:x(tk+1)为时刻tk+1的估计值;φ(τ)为转移矩阵;x(tk)为tk时刻值;b(τ)u(tk)为控制量;W(tk)为过程噪声,τ为时间分步间隔。为调节量。表示过程噪声均值为0,方差为Q:

其中,v(tk)~N(0,R),v(tk)为测量噪声,均值为零,方差为为测量矩阵。
在开始阶段,Kalman估计会随着初始条件的设定而产生不同的数据波动,之后进入稳定状态。这种少数波动不影响整体频差估计效果。如果初始频率和频率漂移设定与实际测量结果相近,则该波动较小。图5为采用Kalman递推的结果,可以看出,经Kalman滤波方法获得的频率残差曲线平直,没有大的波动和固定变化趋势,显示出其普适的拟合与预估能力。
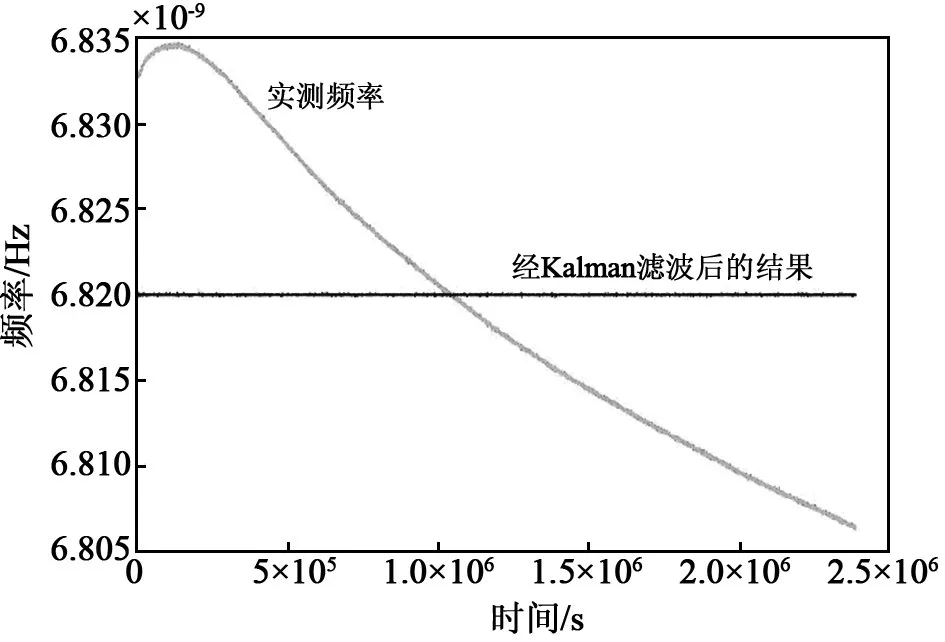
图5 Kalman滤波频率拟合结果Fig.5 Kalman filter frequency fitting results
2 铷钟频率漂移修正需要考虑的因素
修正铷钟频率漂移,首先考虑的因素是频率漂移随时间的变化趋势。短期内铷钟的频率漂移是存在波动的,长期看铷钟的频率漂移具有固定趋势。图6为2015-2018年全球GPS系统上原子钟的漂移变化。追踪铷钟的工作过程,其漂移从10-13/d逐渐降低为小系数10-14/d。在此过程中有小幅波动现象,需要在漂移修正过程中加以考虑。漂移的长期变化可以利用适当的数学模型修正。如果一次修正仍然有固定趋势剩余,可以采用多次修正的办法。经过对GPS星载铷钟的研究发现[9],铷钟在轨工作500 d以后,进入稳定漂移阶段,可以利用数学模型进行较为完全的修正。在此之前,铷钟的漂移变化相对较快,需要进行实时的修正,以满足导航定位需求。最好的方法是对铷钟的漂移进行预估,这样对时间的保持有利。预估的方法有多种,例如最小二乘法、Kalman滤波和灰度滤波等方法[10]。最小二乘法线性回归计算需要确定回归的时间长度,时间过长会影响回归的线性度,过短会影响回归的准确性,这与标准频率信号的品质和测试系统的噪声相关。若以铯钟作为参考源进行铷钟漂移修正时,由于铷钟的短稳优于铯钟,在漂移率确定过程中需要重点考虑铯钟噪声对结果的影响。铯钟的噪声主要由白频噪声和频率闪变平台构成,假定铯钟的频率稳定度可以用式(8)表示[11]:

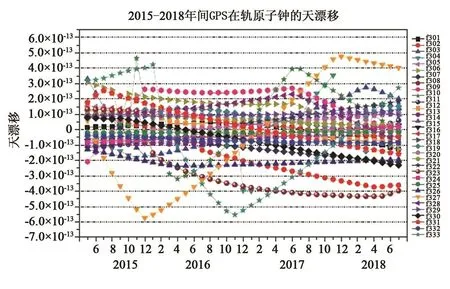
图6 2015-2018年全球GPS系统上原子钟的漂移变化曲线Fig.6 The daydrift of atomic clocks on board GPS in 2015 and 2018
由此引起的漂移率测试方差与测试时间T有关,测试时间越长,精度越高,方差可以用式(9)表示:

目前典型的地面铯钟的短稳指标水平为≤1×10-13@1 s,闪变本底为10-14,能够测出漂移的方差值,如表1所列。

表1 测量时间与漂移率测量误差关系Tab.1 Relationship between measurement time and drift rate measurement error
从表1中看出,在不考虑测量系统噪声的条件下,测试频率漂移率为3×10-14/d的铷钟需要3 d时间。准确修正到小系数10-15量级需要20~30 d的测试时间,修正到小系数10-16量级需要100 d的数据。因此对于铷钟初期漂移可以在开机3天后进行修正,准确修正需要再等待10 d左右,之后可以根据情况间隔20~30 d实施一次。这样由漂移引起的时间误差对导航定位精度的影响由式(1)估算可以减小到厘米量级。实际情况要复杂的多。例如测试系统的噪声和信号传输的噪声需要被考虑,如果测试的是时差,需要将Kalman滤波向量在频率、漂移的基础上增加一个时间(相位)量[12-13]。从自主导航的需求考虑,如果能够将星载铯钟和星载铷钟形成组合钟搭载于导航卫星上,利用比相仪进行比对,通过算法,实时对铷钟的输出频率漂移修正,将铷钟短期稳定度与铯钟的长期稳定度和低漂移结合,不仅可以保证导航和测速的需求,而且可以实现自主导航[14-16]。
3 结论
星载铷钟短期频率稳定度不断提高,已经达到小系数10-13水平,频率漂移对铷钟性能的制约就越发明显。随着对自主导航的迫切需求,修正铷钟的漂移是铷钟应用成败的关键。我国的星载铯钟即将入役,以星载铯钟为参考源对铷钟进行在轨频率漂移实时修正成为可能。本文针对具体的铷钟频率漂移变化规律和铯钟输出频率特征,提出了组合两者优势的铷钟频率漂移修正方法。铷钟和铯钟的组合将在导航卫星系统中更好地发挥作用。
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
宇航计测技术(2021年3期)2021-08-17 05:28:30
法律方法(2019年4期)2019-11-16 01:07:28
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
电测与仪表(2016年12期)2016-04-11 12:27:22
橡胶工业(2015年2期)2015-07-29 08:29:52
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
西北农林科技大学学报(自然科学版)(2014年9期)2014-03-26 07:36:40
