
差动调速型风力发电机组并网控制研究
2019-12-20 07:42:42芮晓明谢鲁冰高学伟修长开
自动化仪表 2019年12期
芮晓明,谢鲁冰,高学伟,修长开
(华北电力大学能源动力与机械工程学院,北京 102206)
0 引言
与变速恒频风电机组易造成电网频率波动不同,差动调速型风电机组通过机械化的转速调节实现发电机恒速输出。因此,针对其并网控制的研究是实现机组安全平稳并网的重要保障。刘华新等[1]针对风机关键部件,提出了重要度灰色模糊评判方法;王春梅[2]针对风电系统主轴承故障,提出了基于深度置信网络的诊断方法;Jelaska等[3]提出了一种新型功率合成混合变速器;武鑫[4]建立了“弹簧-阻尼-质量”的三轴动力学模型;Zhao等[5]提出了一种类似分功率传动链的系统设计概念;李林[6]研究了一种高机械传动与液力调速相结合的传动方案;芮晓明等[7]提出了一种基于差动调速机构(speed regulating differential mechanism,SRDM)的并网风力发电机概念设计;武鑫等[8]提出了一种用于并网风电机组的液压机械变速传动系统设计方案;Krupke等[9]通过试验得出混合型风力发电机系统在风速波动条件下的平稳功率输出;苏睿[10]进一步验证了差动调速风电机组的传动原理可行性[11]。
近年来,针对差动风电机组的研究主要从动力特性角度展开,而针对其运行特性仿真和控制系统并网试验等方面的研究则相对较少。本文利用仿真平台得出差动风电系统关键部件的运行特性,进而设计了模糊控制器,建立了模糊控制规则和仿真模型,并利用试验平台对空载并网过程发电机、调速电动机进行了运行试验分析。分析结果表明,在空载并网阶段,发电机输出电压、频率等基本与电网一致。模糊控制能够较好地使机组在额定风速以下保持最大风能利用系数。该研究对差动风电机组的安全、高效并网具有借鉴作用。
1 差动调速风电系统仿真建模与试验台设计
1.1 仿真建模
差动调速型风电机组主要由风轮、升速齿轮箱、2K-H型差动齿轮箱、同步发电机和异步调速电动机构成。2K-H差动齿轮箱是实现风轮速度调节和发电机组转速恒定的主要部件,发电机并网前的转速控制和风轮转速控制均通过调速电动机实现。图1是差动调速型风电机组控制系统框图。图1中:虚线箭头为信号传输方向;实线箭头为功率传递方向。

图1 差动调速型风电控制系统框图
风电机组并网控制研究首先需要获取其控制系统主要部件的运行特性。各主要部件的运行特性可通过仿真获得。以往关于风电机组控制系统的仿真研究,主要是针对恒速或变速恒频型风电机组。本文所研究的差动调速型风电机组通过机械化转速调节实现变速输入恒速输出,可采用输出电能质量相对较高的同步发电机。其在结构方面与以往采用大功率变流器的可调速风电机组存在较大差异,因此需要对机组关键部件进行专门建模。1.5 MW风力发电机组的发电机类型为同步发电机,调速电动机类型为异步电动机,参考数据如表1所示。
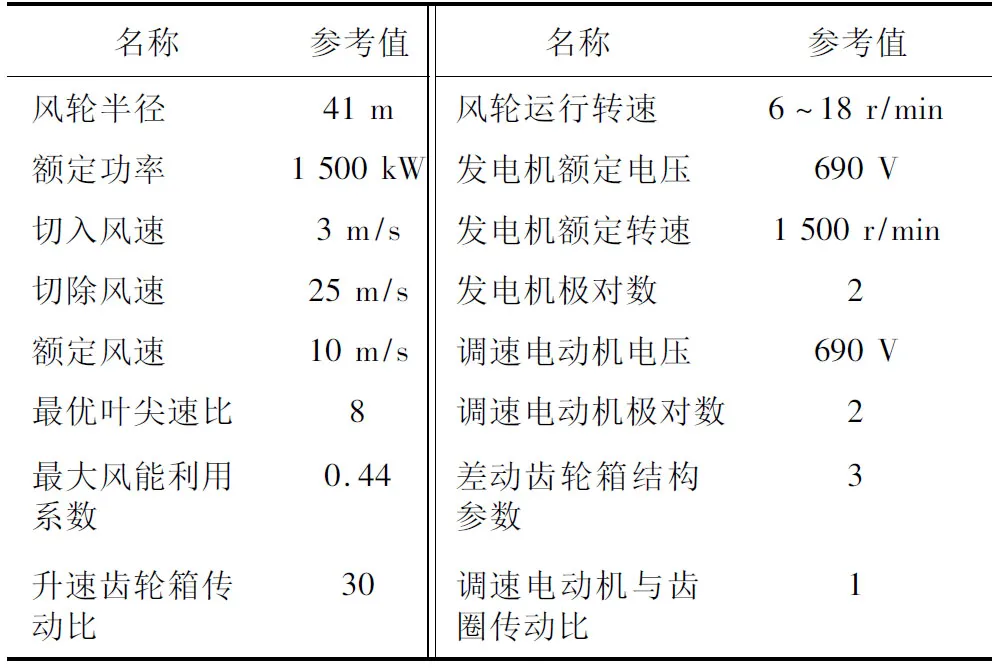
表1 1.5 MW风力发电机组参考数据
各模型构建的具体情况及相应的仿真验证结果简述如下。
1.1.1 风速模型
为了较好地反映自然风速的变化特征,选择组合风速模型作为风电控制系统的风速输入。设定基本风速为7 m/s,阵风时间为第10 s至第35 s,仿真时间为50 s。 仿真结果表明,风速模型可以较好地反映自然风速的特性。
1.1.2 风轮模型
额定风速以下时最大风能利用系数CP=f(λ),利用MATLAB拟合风能利用系数CP与叶尖速比λ之间的关系曲线。当叶尖速比为8时,可达到最大风能利用系数0.44。在已知风能利用系数后,可由此得到风轮功率,进而求得风轮转矩。据此,可建立风轮的Simulink仿真模型。
1.1.3 传动链模型
差动调速型风电机组的采用2K-H差动轮系实现转速的调节。为研究差动调速型风电机组传动链特性,对2K-H差动轮系各构件的运动关系、调速电机的功率区间和传动链的三质量块模型进行理论分析,并建立仿真模型。传动链三质量块模型如图2所示。
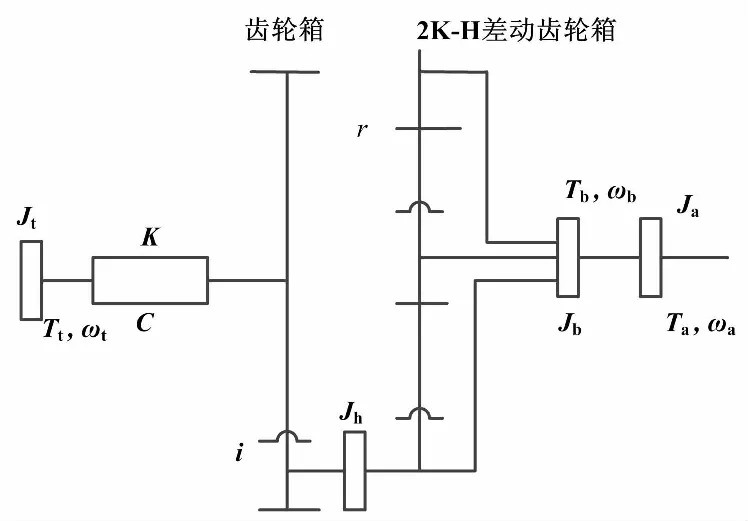
图2 传动链三质量块模型
图2中,各参数的关系为:
ωa=(1+r)ωh-rωb=(1+r)iωt-rωb
(1)
(2)
式中:r为差动轮系结构参数;ωa为太阳轮的角速度;ωb为齿圈的角速度;ωh为行星架的角速度;ωt为风轮的角速度;i为增速齿轮箱传动比。
经推导,可得行星架的转矩为:
(3)
最后,可得转矩与转速的关系为:
(4)
(5)
式中:c为主轴阻尼系数;k为主轴刚度系数;Jt为风轮的转动惯量;Ja为发电机转子的转动惯量;Jh为行星架的转动惯量;Jb为齿圈的转动惯量;Ta为太阳轮的转矩;Tb为齿圈的转矩;Th为行星架的转矩;Tt为风轮的转矩。
根据以上理论分析,可建立差动调速风电机组的传动链仿真模型。
1.1.4 同步发电机模型
根据同步发电机的有关数学模型和理论分析,在Simulink中建立同步发电机仿真模型。发电机参数设置为:额定电压690 V,极对数2对,额定转速为1 500 r/min。
1.1.5 调速电动机模型及其转速控制方法
调速电动机的控制目标是:①在机组并网前,控制发电机转速达到并网转速要求;②在机组并网后,控制风轮的转速以获取最大功率。在差动调速系统中使用异步电动机,可以实现较为平稳的转速调节。而对异步电机的转速控制,本质是对电磁转矩的控制。由于风速大小的随机性,风轮转速须不断调整,且传动系统转动惯量较大,转速调节过程将导致显著的电机负载变化。因此,选用转差频率控制方法较为合理。
1.2 试验台设计
为验证差动调速型风电机组传动和控制原理,设计了差动调速型风电系统试验台。该试验台主要由2个伺服电机、1个2K-H差动齿轮箱、2个扭矩/转速传感器、1个同步发电机、1台控制主机及控制系统相关软硬件组成。
2 典型工况下差动调速风电机组控制策略
2.1 空载并网控制
空载并网过程简单、高效、可靠性较高,通常要求电机侧与网侧的电压、角频率和相位三个值接近,即电压偏差不超过5%、频率偏差不超过0.2 Hz、相角差不超过5°。满足上述参数要求,即可实现空载并网。
2.2 额定风速以下机组控制
2.2.1 基于模糊控制方法的最大功率追踪
机组并网后,额定风速以下的控制目标是使风轮保持最大风功率时的最优转速。为了使差动调速型风电机组实现额定风速下最大功率追踪运行,风轮转速须根据运行情况而实时变化。而风轮转速是通过调速电动机的转速调整实现的,因此,最大功率追踪控制系统的设计实质是实现对调速电机转速的有效控制。为此,引入了模糊控制方法,并基于最优转矩法开展模糊控制器设计。
2.2.2 模糊控制器的结构设计
模糊化是指把输入的清晰值映射成模糊子集及其隶属函数的变换过程,清晰化是指把模糊量变换成清晰量的过程。考虑控制器输入、输出量,差动调速型风电机组最大功率追踪模糊控制器可以采用双输入、单输出的设计,以满足控制需求。通过转矩、转速传感器测出风轮转矩与转速的比值,然后与转矩转速最优比值K进行比较,得到K值偏差及K值偏差的变化速率。K值偏差和K值偏差的变化速率作为模糊控制器的输入量,控制器根据控制规则选定经调节后的速度输出。最大功率追踪二维模糊控制系统如图3所示。
图3中:输入量en表示第n时刻与第(n-1)时刻的K值偏差; 输入量ecn表示第n时刻与第(n-1)时刻的K值偏差变化率; 输出量Un表示第n时刻调速转速变化的实际值。
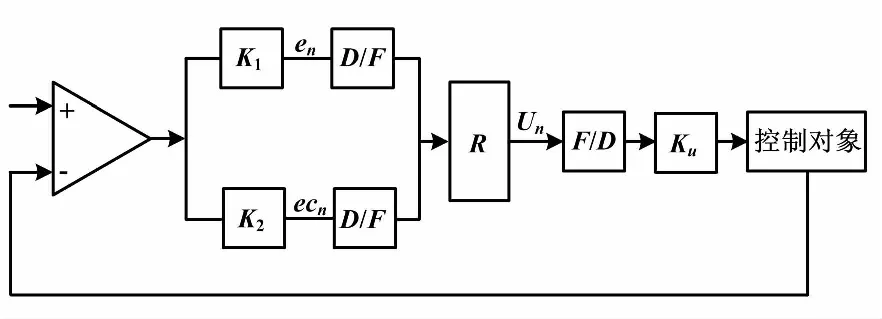
图3 最大功率追踪二维模糊控制系统
2.2.3 模糊控制器的参数定义
(1)最优转矩转速比确定。
风速的测量存在一定不确定性,往往难以建立风轮转速和风速之间的准确关系。为了消除风速对风轮转速的直接影响,可通过修改功率表达式,以变量替换消除功率公式中的风速变量[12]。
(6)
式中:Popt为最大风功率;CPmax为最大风能利用系数;R为风轮半径;v为风速;λopt为最优叶尖速比;ρ为空气密度。
根据风力发电机组的最大风能利用系数CPmax和最优叶尖速比λopt求出Popt,再用角速度ω替换风速v,经推导得出:
(7)
(8)
式中:Topt为最大风能利用系数下的风轮转矩;Kopt为最优转矩转速比。
从式(7)可以看出,当风轮达到最大风能利用系数时,风轮的转矩与风轮的角速度的平方成正比。由此可以得出:在空气密度不变的条件下,只需控制风轮转矩和转速平方之间的比值,就可以达到最优转矩转速比,即风轮达到最大风能利用系数。根据表1的数据,将机组的已知参数CPmax、ρ、R、λopt代入式(8)中,可以得出Kopt=1.923×105。通过测得风轮的实际转矩和转速,可以得到实际的K值。实际的K值与Kopt值之差即为模糊控制器K值偏差输入量。
(2)隶属函数的确定。
①根据K值偏差选定7个模糊子集,即:正大(PB)、正中(PM)、正小(PS)、零(ZO)、负小(NS)、负中(NM)、负大(NB),用于涵盖输入量的取值范围为(-6,+6)。
②根据K值偏差变化速率选定5个模糊子集,即正大(PB)、正小(PS)、零(ZO)、负小(NS)、负大(NB),用于涵盖输入量的取值范围为(-6,+6)。
③输出量的论域为(-6,+6),分别是:正大(PB)、正中(PM)、正小(PS)、零(ZO)、负小(NS)、负中(NM)、负大(NB)。
(3)控制器模糊规则的建立。
采用Mamdani Min-Max方法,并根据实际经验,总结出以下5条基本模糊规则。
①如K值偏差为正,则快速增大调速电动机转速。
②如K值偏差为负,快速减小调速电动机转速。
③如K值为最优,则调速电动机转速不变。
④如K值为最优且K值偏差变化率为正,缓慢增大调速电动机转速。
⑤如K值为最优且K值偏差变化率为负,则缓慢减小调速电动机转速。
(4)模糊量输出值及其清晰化。
模糊规则在某一输入量下并不一定全部被激活。为了简化计算,利用近似推理的方法计算模糊量输出值。设在某一时刻测得输入量为e=-2、ec=2,根据K值偏差输入量隶属函数分布,可知清晰量e=-2模糊化后映射到的模糊子集NM和NS上;根据K值偏差变化率输入量隶属函数分布,可知清晰量ec=2模糊化后映射到ec的模糊子集NB和NM上。从上述模糊规则表可知,此时会使用有4条模糊规则。这4条模糊规则如下。
①ifeNM andecis ZO thenuis NM(1)。
②ifeNM andecis PS thenuis NS(2)。
③ifeNS andecis ZO thenuis NS(3)。
④ifeNS andecis PS thenuis ZO(4)。
根据控制测得每个输出模糊子集后,可以得到总输出。推理输出的模糊子集如图4所示。
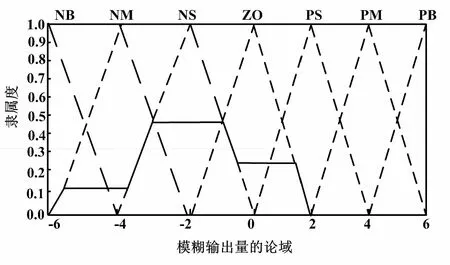
图4 推理输出的模糊子集
由图4可以看出,总输出是一个模糊子集,它的隶属函数是一个在(-6,2)的不规则形状。后续可用最大隶属度法对模糊量进行清晰化,以实现对调速电动机的转速控制。
3 仿真与试验分析
3.1 仿真分析
3.1.1 调速电动机基本运行特性仿真分析
针对调速电动机运行特性开展仿真分析,设置仿真时间为5 s,采样时间为0.000 01 s,仿真算法为ode5,调速电动机及风轮初始转速为0 r/min。调速电动机基本运行特性仿真结果如图5所示。

图5 调速电动机基本运行特性仿真结果
①由图5 (a)可知,转速的变化基本是一个线性过程。在0~3.5 s的时间区间,调速电动机带动发电机逐渐升高转速; 在3.5 s时发电机达到同步转速,调速电动机转速随即稳定在500 r/min。
②由图5(b)可知,调速电动机在启动后出现约为1.4 kN·m的瞬时电磁转矩最大值,提速过程中电磁转矩的变化幅度并不大,主要在0.6~1 kN·m的范围内波动,表明提速过程运行比较平稳。接近3.5 s时,电磁转矩迅速降至0 kN·m。从3.5 s开始,由于抵消传动运行过程的能量损失,因此电磁转矩很小。
③由图5 (c)可知,在0~3.5 s的时间区间,定子电流值随着调速电动机转速提升而缓慢升高,电流频率也逐渐升高,在转速稳定后定子电流值随之迅速降低。
3.1.2 机组最大功率追踪运行特性仿真分析
风轮的转速直接影响机组捕获风能的能力。差动调速风电系统仿真结果如图6所示。
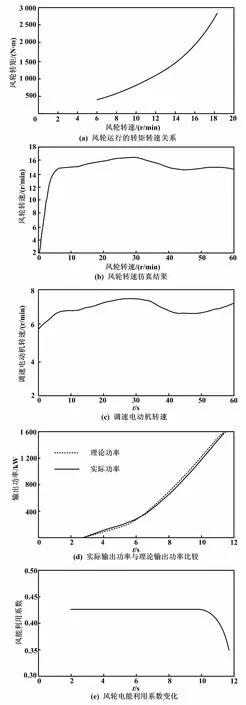
图6 差动调速风电系统仿真结果
以固定变化速率的渐变风风速模型作为输入风速,得到如图6(a)所示的风轮运行过程中转矩和转速的关系。当风轮转速在6 r/min以下时,转矩为零。此时风轮处于自由旋转状态,发电机没有并网。当风轮转速达到6 r/min以上时,发电机并网。此时,风轮需要克服发电机产生的反作用力。随着风速增大风轮转速也不断提升,转矩同步升高;在组合风速模型的基础上,对风轮最大功率追踪运行过程转速的变化情况进行仿真,得到风轮转速变化曲线,如图6(b)所示。图6(c)所示为调速电动机运行过程中转速的仿真结果,调速电动机的转速与风轮转速变化方向基本一致,符合差动调速机构构件的运行特点。对差动调速型风电系统最大功率追踪过程的稳态特性分析仿真结果如图6(d)所示,实际输出功率在风速较高时与理论输出功率基本吻合,实现了较好的最大功率追踪效果。风能利用系数的变化如图6(e)所示。在额定风速以下,系统能够保持最大风能利用系数。达到额定功率后,随着风速继续增加,风能利用系数快速下降。
3.2 试验台并网控制试验分析
3.2.1 试验台发电机转速分析
利用差动调速型风电系统试验台对发电机并网前的运行情况进行试验,同时对发电机的运行转速进行测量。发电机空载并网前运行转速曲线如图7所示。
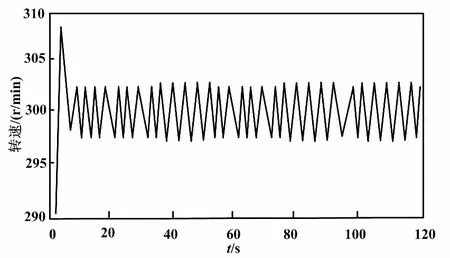
图7 发电机空载并网前运行转速曲线
3.2.2 空载并网试验发电机输出电压分析
为了直观地观察发电机输出的电能情况,在发电机侧和电网侧分别连接示波器,以测量发电机输出电压波形。根据具体试验情况,发电机并网前运行较为平稳,在某一时刻发电机侧和电网侧的电压波形基本重合,发电机输出电压波形与电网电压波形非常接近,二者的频率、相位和电压幅值基本一致。由此证明,此时发电机运行情况良好,运行转速稳定已基本具备并网条件。
4 结束语
针对差动调速风电机组,建立了风轮、传动链、调速电动机和发电机的仿真模型,并对调速电动机运行特性开展仿真分析。仿真结果表明:调速电动机转速呈现线性变化特点,在3.5 s时发电机达到同步转速,调速电动机转速随即稳定在500 r/min;调速电动机在启动出现瞬时电磁转矩最大值后,在后续的提速过程中主要在0.6~1 kN·m的范围内波动,变化幅度较小,表明提速过程运行比较平稳;定子电流值在0~3.5 s的时间区间内,随着调速电动机转速提升而缓慢升高,在转速稳定后随之迅速降低。针对所设计的差动调速风电控制系统,在组合风速模型的基础上对风轮最大功率追踪运行过程中风轮转速的变化情况进行仿真分析。仿真结果表明:仿真开始前5 s左右,风轮转速逐渐升高,风轮逐渐逼近最大风能利用系数;随着风轮转速逐渐提高而达到最优转速后,风轮转速与风速的变化趋势基本相同。实际输出功率在风速较高时与理论输出功率基本吻合,实现了较好的最大功率追踪效果。较之额定风速以上的情形,在额定风速以下,系统能够更好地保持最大风能利用系数。针对差动调速风电机组并网控制开展试验研究。
研究结果表明:发电机在3.5 s左右时,其转速达到额定运行转速后基本保持在300 r/min,证明了试验台发电机能够保持恒定转速运行;通过试验输出的差动调速型风电系统发电机转速及发电机输出频率、电压等参数显示,各参数基本与电网一致,符合并网要求,取得了较为满意的效果,从而验证了模糊控制系统对实现空载并网的有效性。
猜你喜欢
昆钢科技(2020年4期)2020-10-23 09:31:58
太阳能(2019年10期)2019-10-29 07:25:08
中医眼耳鼻喉杂志(2019年2期)2019-04-13 05:23:46
四川冶金(2018年1期)2018-09-25 02:39:28
水利技术监督(2017年3期)2017-06-09 06:55:34
电子制作(2017年10期)2017-04-18 07:23:16
电子制作(2017年23期)2017-02-02 07:17:24
电测与仪表(2015年24期)2015-04-09 12:04:48
电力工程技术(2014年5期)2014-03-20 14:19:38
河南科技(2014年11期)2014-02-27 14:09:49
