基于北斗定位系统的岸基靠泊智能指挥技术浅析
2019-12-19 09:03:22王帆1李楠寿志杰
中国设备工程 2019年22期
王帆1,李楠,寿志杰
(1.浙江浙能嘉华发电有限公司,浙江 平湖 314201;2.杭州集益科技有限公司,浙江 杭州 311200)
21世纪以来,世界范围内区域经济一体化发展迅速,国际贸易日趋激烈。随着我国与世界之间的经济贸易往来越来越频繁,借助于海洋运输方式开展的货物贸易发展势头迅猛,海洋贸易成为我国国际贸易重要组成部分。截至2016年年底,国际航运业承担了我国绝大多数进出口物资的运输,大宗商品进口量继续保持増长,贸易条件进一步改善,其中,进口铁矿石10.24亿吨,増长7.5%,原油3.81亿吨,増长13.6%,煤炭2.56亿吨,増长25.2%,铁矿石、原油、煤炭海上进口量分别占世界铁矿石、原油、煤炭海运量的71.1%、18.1%、17.6%。
“智慧港口”建设可以为确保海洋运输稳固发展提供有效保障,充分借助物联网、云计算、大数据、智能感知等新一代信息技术对港口进行透彻感知、广泛互联以及信息深度挖掘,实现港口各类资源要素的无缝连接和各功能模块的协同联动,并最终实现港口智能、高效、安全、便捷、绿色发展的现代化港口形态。而靠离泊辅助技术是“智慧港口”建设中的重点内容。在靠离泊辅助系统的研究历史中,出现过多种探测技术的应用,比如空气声波岸基辅助技术、声纳岸基辅助技术、微波雷达岸基辅助技术、红外岸基辅助技术、激光岸基辅助技术等。几种岸基辅助技术在使用过程中都有比较明显的优缺点。空气声波岸基辅助技术在几种技术中种最不稳定,声纳岸基辅助技术作用于水下,在水下作业时,探测距离比电磁波岸基辅助技术远,精度更高,但容易受水下声源和水下涌流的干扰。微波雷达岸基辅助技术优点是探测角度广,能够及时有效地把握最危险情况。但所处的微波波段极易受到雨雪等气象因素的干扰,容易受遮挡物和假目标的影响,而且作用距离在50m左右。红外岸基辅助技术容易受天气影响,对气象能见度要求高,当气象条件不好时,探测精度和距离无法保证。激光岸基辅助技术是目前应用最广泛且效果相对较好的一种岸基式岸基辅助系统。优点是探测精度高,动态反应速度灵敏,作用距离远。但其也存在一定的缺点,如激光束较窄,测量面为点,不能掌握船舶整体态势,自动寻找目标的能力差,受天气影响较大。而且激光岸基系统损坏率较高。激光探测器安装位置固定,对船舶大小和船型的适应性较弱。
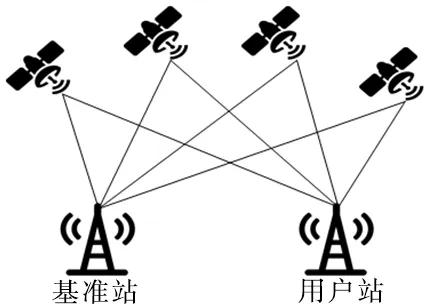
图1 差分定位过程
利用北斗精确定位技术和无线传输技术,实时长距离监测船舶进港靠泊前以及靠泊过程中的航速、航向、距离等航行情况,并结合调度以及码头影像系统,为船舶靠离泊经济、安全、环保运行提供可靠的管理、检测手段。
1 北斗精确定位技术
载波相位实时动态差分(RTK)系统是以载波相位观测量为根据的实时差分测量系统,其原理是通过两个(多个)接收机的载波数据进行差分,消除公共误差,从而实现高精度相对定位。RTK-北斗定位系统在实时导航方面有着广泛的应用,通过实时获取载体的空间坐标,并结合其他传感器来实时获取自身位姿,通过高效、精确控制算法来实现精密导航。目前,利用RTK技术实现导航控制的应用有很多,如精准农业系统、无人飞机、无人汽车等。
差分定位的原理总的来说,是根据卫星导航系统误差变化缓慢,并且有很强的时间空间相关性,通过两个接收机求差可以消除大部分相同的误差项,因此,可提高定位精度。一个简单的差分定位系统包括三部分:基准站接收机、流动站接收机(用户站)和数据链。数据链指用于两站之间通信的无线电设备。
差分定位过程如图1所示。根据基准站的校正信息可分为:位置差分、伪距差分、相位平滑的伪距差分、载波相位差分。差分修正主要由两种方式来实现,一种是在测量过程中修正,即基准站将采集原始数据发送给流动站(用户站),用户站进行解算;另一种是基准站将计算后的结果发送给流动站,流动站将自身结算的结果减去改正量来获取最终定位。
在岸基智能指挥控制系统中,在码头岸基建立北斗定位基准站,通过无线传输方式,自动实时广播基站定位差分数据(半径5公里内),当船只进入码头范围内,船舶定位系统(用户站)接收到差分数据,建立RTK系统,可以达到厘米级定位精度。
2 岸基靠泊智能指挥系统

图2 岸基靠泊智能指挥系统组成框图
岸基靠泊智能指挥系统如图2所示,由下列设备组成:(1)指挥中心服务器:根据船舶上多点的北斗移动定位装置的精确定位数据进计算航海信息。(2)岸基北斗定位基站:用于发送基站的北斗定位差分数据RTK信号。(3)北斗移动定位装置:用于接收北斗定位差分数据RTK信号并计算当前精确定位数据。(4)岸上移动终端与船舶移动终端:用于接收航海信息,供岸上与船上运行人员远程监控与操作。(5)视频监视设备和视频存储设备:用于船舶靠近泊位时进行视频安全监控。岸基北斗定位基站与北斗移动定位装置通过无线通讯模块数据通讯;北斗移动定位装置通过船舶无线路由器与船舶移动终端数据通讯;服务器通过岸上无线路由器与岸上移动终端数据通讯。
2.1 船舶定位系统
如图3所示,船舶定位系统在船体头部一处,尾部两处各安装一套北斗移动定位系统,通过接收基站传送的差分数据建立RTK系统,精准定位船舶经纬度,在北斗定位系统状态正常的情况下能达到厘米级精度。
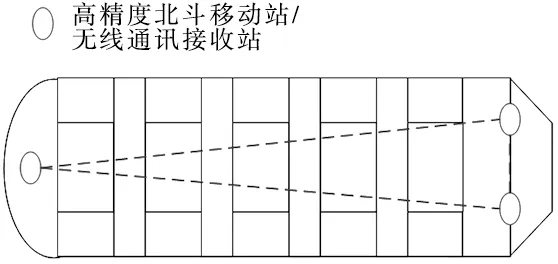
图3 船舶定位系统安装位置示意图
通过三处北斗定位系统位置信息精确定位船舶。将数据回传到系统后,通过计算确定船体航向、方位、航速、距离等数据。
2.2 岸基与海基实时通讯系统
为确保数据的准确性以及实现数据的存储和计算,系统在码头布置一套岸基北斗定位基站,一台用于定位数据综合处理和信息发送的指挥中心服务器,一台用于岸上传输WiFi信号、实时发布可视化船舶靠泊信息的无线路由器。
2.3 码头岸基智能指挥控制系统平台
系统平台建立基础数据库包括所有来煤船舶、码头岸基、锚桩定位、码头卸船机设备等,对这些设备进行测绘,通过数据进行计算和建模,建立码头实时动态模型,从而建立一套智能化的码头调度指挥控制系统,确保船舶岸基离岸的安全。该系统基于多种开发语言,是一套稳定有效,集数据采集、分析、显示、存储、预测预警于一体的系统平台。系统平台接入相关空间定位数据、船型数据、缆绳数据、码头岸基数据、码头锚桩数据和影像数据、潮位、暗流等数据,实时分析计算船舶动态信息,并在多个指挥中心的各监控点动态显示船舶靠离泊数据。
2.3.1 船体模型数据库
基于基础船型数据和3D建模技术,建立完整船体模型数据库,可以为各个系统提供船体模型基础数据。
2.3.2 船舶岸基离岸实时空间定位系统
系统作为一套高精度船舶空间定位系统,可以实时获取船舶当前位置、航速、潮位、暗流状况、拖船当前位置,以及智能分析和计算船舶和泊位的相对位置、船岸夹角、航行速度等。基于高精度空间定位技术、大数据技术,实时对船舶进行定位,智能分析船舶和泊位的相对位置、船岸夹角、航行速度等,并对锚桩和缆绳的位置进行实时方位显示,为船舶的智能安全靠泊提供可靠数据。

图4 系统工作流程
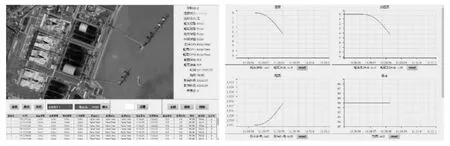
图5 系统界面
2.3.3 智能影像系统
智能影像系统,实时再现船舶、码头岸基、码头锚桩、缆绳等多角度影像,在船舶驾驶舱、拖船驾驶舱、岸基导引、码头控制中心等分别安装智能影像装置,实时控制整个岸基过程的有序安全操作。该系统基于高清影像技术和影像分析技术以及高精度的测绘技术,实时获取船舶靠离泊作业时高清影像数据,建立船舶靠离岸动态模型,调度指挥船舶的安全靠离泊作业。
2.4 系统工作流程
系统的工作流程如图4所示,包括以下步骤:(1)码头岸基北斗定位基站实时广播定位差分数据,指挥中心服务器发送轮询信号。(2)当船舶进入码头信号范围时,船舶无线通讯设备接收到轮询信号以及定位差分数据。(3)船舶上北斗定位模块将由北斗信号接收天线得到的船舶定位数据通过定位差分数据校准,得到校准后的船舶定位数据。(4)船舶无线通讯设备将校准后的定位数据传回码头。(5)指挥中心服务器结合自身北斗定位数据,处理船舶北斗定位信号,得到精准船舶位置、航速、姿态数据。(6)岸上无线路由器将得到的可视化靠泊方案通过WiFi传递给岸上移动终端。(7)码头岸基北斗定位基站将可视化靠泊方案传递给船舶,由船上无线路由器通过WiFi将可视化靠泊情况传递船上移动终端。(8)船员以及岸上运行人员通过指示进行安全靠泊作业。(9)船舶靠泊至泊位后由监控摄像设备进行实时安全监控,监控视频信息也可通过无线路由器传递给无线终端以提供给运行人员检查。
3 应用效果
系统利用北斗精确定位技术,实时监测船舶靠泊前航速、航向、距离等航行情况,精确定位船舶位置,达到厘米级精度,为船舶靠离泊提供高精度实时性的航速、航向、距离等信息,为设立3等级(3海里、2海里、1海里)分级航速监测提供精确数据。
利用码头智能摄像监控系统,实时采集船舶靠泊时图像信息,便于岸上指挥人员和船长实时直观监测船舶靠泊动态。
系统的工作界面如图5所示。
4 结语
本文在研究RTK定位原理、岸基导航技术以及智能影像系统的基础上提出了一种安全、稳定高效的岸基智能指挥控制系统,满足了“智慧港口”靠离泊智能化运行的要求,为“智慧码头”的建设提供了重要基础。
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
当代陕西(2019年18期)2019-10-17 01:48:50
现代电子技术(2019年1期)2019-01-10 01:48:14
大陆桥视野·下(2017年5期)2017-06-19 01:20:38
太空探索(2016年3期)2016-07-12 09:58:47
通信电源技术(2016年6期)2016-04-20 06:21:24
信息安全研究(2015年3期)2015-02-28 20:17:57
太空探索(2014年1期)2014-07-10 13:41:50