螺旋匝道(桥)小客车横向行驶特性实测研究
2019-12-16 09:40李建兴吴国雄
西南交通大学学报 2019年6期
徐 进,李建兴,林 伟,崔 强,吴国雄,杨 奎
(1.重庆交通大学山区复杂环境人车路协同与安全重庆市重点实验室,重庆 400074;2.四川省铁路产业投资集团有限责任公司,四川 成都 610093;3.重庆市轨道交通(集团)有限责任公司,重庆 401120;4.重庆交通大学土木工程学院,重庆 400074)
螺旋线通过连续盘绕来延展行驶距离,有效解决了地形受限条件下的路线快速升降,近年来广泛应用于道路和桥梁工程,比如海南浦大桥引桥、日本千本松大桥引桥、日本川崎Nanadaru环形桥、重庆市融侨大道、重庆苏家坝立交、太原天龙山公路、涪陵乌江二桥和长江一桥桥头立交、以及重庆北碚嘉陵江大桥南桥头立交等.与运用常规展线手法得到的匝道型式相比,螺旋匝道在几何构型和行驶条件上具有以下鲜明特点:一是匝道曲率半径恒定,二是单向陡坡,三是多圈连续小半径回转.由于螺旋匝道截然不同的线形特点和行驶条件,其驾驶行为和车辆运行方式存在特殊性.
国内一些设计机构的工程师在文献[1-4]中阐述了螺旋匝道的构造设计、结构受力计算和地基处理等方面的经验.张智勇等[5]基于车载GPS的速度数据,建立了以曲率变化率和超高为自变量的立交匝道运行速度模型;张驰等[6]对雷达测速枪的采集值进行回归,得到了高速公路互通立交出口分流点和鼻点的小客车速度模型;王海君等[7]根据高速公路互通立交出口分流点、中间点以及鼻点的速度值,推导了减速车道长度的计算模型和推荐值.方守恩等[8]采用驾驶模拟器分析了地下道路匝道入口段的车辆运行速度、加速度以及从加速车道汇入直线的位置.胡江碧等[9]采集了高速公路立交区的驾驶员眼动、车速和车道使用数据,分析了立交区的驾驶行为.
在国际上,Polus等[10-11]用高空摄像机记录了汽车在互通立交出入口区域的运动状态,得到了汽车汇入和驶离主线的位置点以及加/减速长度,为明确平行式和直接式变速车道的设计参数提供了数据支持; Ahammed等[12]用雷达枪追踪汽车在互通立交合流区的行驶速度,建立了合流区速度、加速度和加速距离模型; Fitzpatrick等[13]分析了美国目前立交设计规范中关于分流区汽车减速行为基本假设的合理性以及减速率的适用性; Zirkel等[14]以环形立交为对象,讨论了驶入速度离散性和视距对事故率的影响;Perco等[15]基于雷达测速枪的实测数据,建立了两类立交驶入段和驶离段的汽车运行速度模型.
综上,目前国内外尚未见关于螺旋匝道(桥)驾驶行为的报导,以至于目前我们无从了解和掌握螺旋匝道(桥)上的汽车运行状态和驾驶行为特征.为此,本文开展了螺旋匝道小客车自然驾驶实验,明确了汽车在多层螺旋匝道(桥)上行驶时,横向加速度的幅值、变化趋势和模式、行驶舒适度、以及车道使用特征等一系列亟需研究的问题,为在设计环节提高螺旋匝道本质安全提供了基础数据和科学依据.
1 试验设计
1.1 试验对象
在重庆辖域内选择4处试验地点,分别为涪陵长江一桥(YZB)、涪陵乌江二桥(WJSB)、融侨大道螺旋桥(RQB)和金凯装饰城环形高架桥(JKRB).其中RQB和JKRB为路段形式,不存在路线的转换;另外两处是桥头立交匝道,存在交通的分流与合流.表1是4处试验对象的主要技术参数,螺旋匝道平面线形为单一圆曲线,在出入口通过缓和曲线与直线或者其它圆曲线连接.图1是4座螺旋匝道(桥)的外观全景以及周边路网情况.试验对象的路面状况干净、平整、标线清晰齐备.实车行驶试验的时间为10:00—17:30,避开早晚高峰,均为自由流行驶.同时,在选择试验日期时主动避开了暴雨、大风、浓雾等恶劣气象条件.本项试验的时间跨度为2016年3月至2017年10月.
1.2 试验仪器和车辆
用惯性测量单元与双DGPS相组合的航姿测量系统来记录汽车轨迹和速度,在GPS信号丢失时,对惯导单元测得的加速度信号进行积分来补偿断档数据.同时,用非接触式多功能测速仪采集连续行驶速度,该仪器基于激光多普勒原理来实现平整路面的行驶速度测量,可获取隧道、下穿等封闭环境下的连续行驶速度,两套测速系统的结果相互验证.在汽车前后玻璃上各安装一个行车记录仪,摄录前后向行驶环境.试验车辆为别克天尊、陆尊、丰田海狮以及奔驰威霆,均为7座商务车.

表 1 试验对象的主要技术参数Tab.1 Main technical parameters of test roads
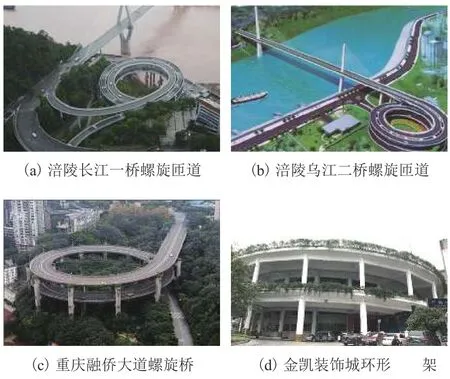
图 1 试验对象Fig.1 Test roads in this study
1.3 被试(驾驶员)
共16位驾驶员参与试验,年龄为23~57岁,平均年龄38岁;驾龄为1~31 a,平均驾龄10 a.被试由租车公司从社会上招募,熟悉车辆状况和驾驶操作.试验前告知被试,按照平日的驾驶风格和习惯驾驶驾驶,行驶过程中不对被试提出任何要求也不进行任何暗示,最大程度地维持驾驶员的自然驾驶习惯.
在试验前先拟定行驶路线,包括数据记录的起始位置、车辆驶过螺旋匝道(桥)后的调头位置.针对某一处试验对象,把1个匝道上行和1个匝道下行作为一个来回,要求每个驾驶员往复行驶4~6个来回.目的是观察首次行驶体验是否显著区别于后续的行驶,以及保证数据样本的充分,避免出现单次行驶在遭遇突发情境时无法采集到有效数据的情况.整个试验分6次进行,每次2~4位被试参与试验.
2 横向加速度整体特征
横向加速度(a)是描述曲线路段侧向安全性和舒适性的主要指标,同时也是控制平曲线超高率的主要参数.截取匝道范围内的横向加速度数据,绘制连续的a曲线.
图2是YZB南桥头螺旋立交6位被试的a曲线,a为正值时是上行匝道行驶,负值时是下行匝道.图例中包含的信息依次包括:被试者编号、年龄(NL)、驾龄(JL)和累积行驶里程(LJ);NL 后的数字为年龄;JL后的数字为驾龄,单位为a;LC后的数字为累积行驶里程,单位为 ×107km.由于螺旋匝道是等曲率圆曲线,一般会认为匝道范围内的横向加速度是一个定值,但根据图2,不管是上行方向还是下行方向,a曲线在匝道内都有明显的震荡.由于轨迹曲率接近恒定,导致震荡主要因素是行驶速度的波动.驾驶员驶出上行匝道之前由于减速行为,导致上行匝道在临近末端位置有一明显的下降,见图2(d)中的标注.根据横向加速度曲线的形态,不同被试的曲线变化模式有比较显著的差别.
将WJSB不同被试的a曲线汇总在同一个坐标系内,如图3所示.忽略掉局部的震荡来看整体趋势,下行匝道的a值基本维持平稳,而上行匝道几乎都是中间略向外鼓出,匝道中间部分的a值略高于匝道两端.此外,根据曲线的幅值分布,不同被试驾车行驶时横向加速度值差异非常显著,形成了比较厚的波带宽度.
RQB的a曲线如图4所示,下行时a值在螺旋匝道范围内基本维持稳定.上行时在匝道前端的增长过程相对缓慢.D1在上行时a值有两处明显的下降,观察行车记录仪图像是由于超车变道所致.该螺旋匝道是左转上桥,在超车时轨迹向右侧偏离原车道,轨迹有被“拉直”的趋势,见图5,轨迹曲率下降,最终导致a值降低.
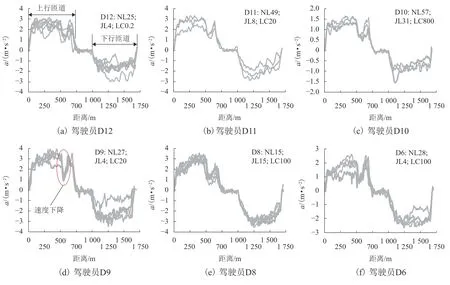
图 2 涪陵长江一桥螺旋匝道横向加速度Fig.2 Lateral acceleration on helical ramps of Fuling Yangtze River Bridge
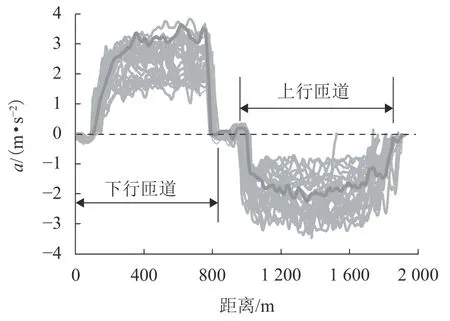
图 3 涪陵乌江二桥螺旋匝道横向加速度Fig.3 Lateral acceleration on helical ramps of Second Fuling Wujiang River Bridge

图 4 重庆融侨大道螺旋桥横向加速度Fig.4 Lateral acceleration on Rongqiao Helical Bridge

图 5 螺旋匝道上的超车Fig.5 Overtaking on helical ramps
图6是JKRB的a曲线,a值在螺旋匝道内总体上维持稳定.D10和D11的a值各自有一处比较尖锐的下降,都是避让摩托车所致,其轨迹如图7.二者在避让过程中都有减速行为.此外,窄道会车也会导致a值曲线幅值下降.
根据4处试验对象的a曲线形态,如果忽略掉局部的震荡,可以归类得到螺旋匝道范围内的横向加速度变化模式,如图8.主要有5种模式,模式Ⅰ的a值基本保持稳定;模式Ⅱ的a曲线在匝道内向上鼓出;模式Ⅲ的a持续降低;模式Ⅳ的a持续增加;模式Ⅴ的a是缓和上升然后保持平稳.
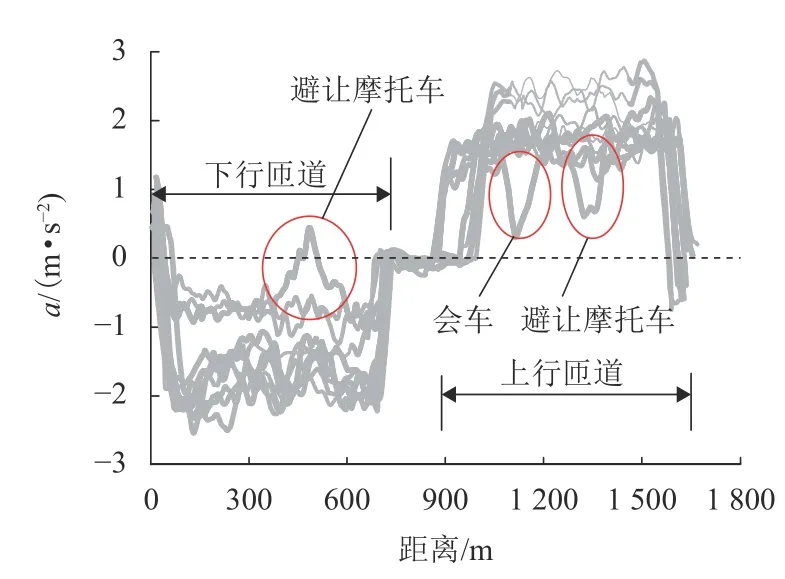
图 6 涪陵金凯装饰城环形高架横向加速度Fig.6 Lateral accelerate on Jinkai Helical Bridge

图 7 螺旋匝道上避让对向来车Fig.7 Avoiding on helical ramps
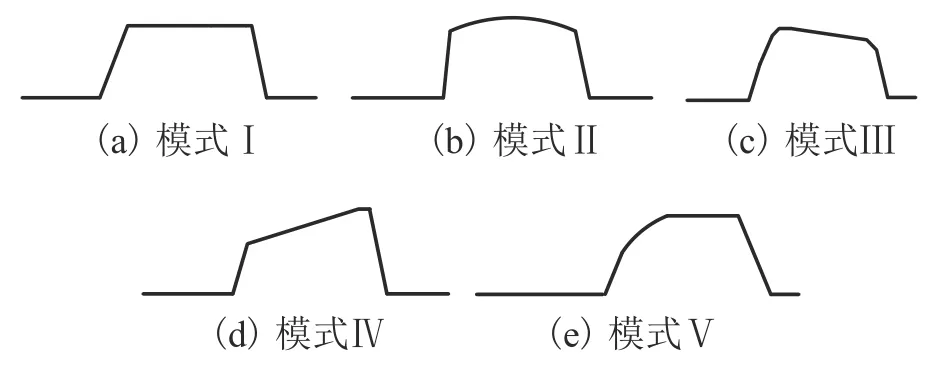
图 8 螺旋匝道上的横向加速度模式Fig.8 Patterns of lateral acceleration on helical ramps
3 螺旋匝道横向舒适性
对匝道范围内的每条a曲线,在幅值稳定后取其均值,得到上行匝道的横向加速度均值au和下行匝道的横向加速度均值ad,如图9.图中,ap为横向加速度峰值.对于某位被试,将各次行驶的au和ad进行算术平均,得到横向加速度二次均值aua和ada:
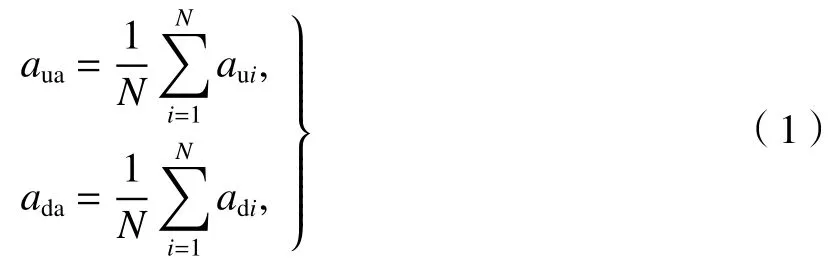
式中:aui、adi分别为上、下行匝道第i次行驶的横向加速度均值;N为被试在匝道上的行驶遍数.
假定螺旋匝道被试的数量为M,因此每个匝道可得到M个二次均值点对,即数组{auaj,adaj},j=1,2,··· ,M,auaj和adaj分别为第j个被试在上行和下行匝道上的横向加速度均值.
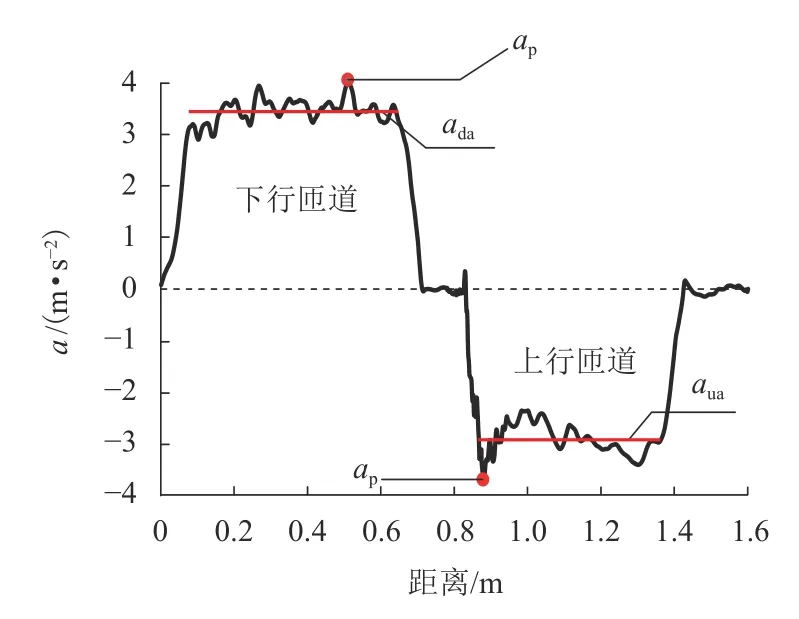
图 9 横向加速度均值点计算示意Fig.9 Calculation of average ofaon helical ramps
对aua按幅值大小升序排列,得到au折线和ad折线,如图 10(a)、(c)、(e)和(g),图中的数据点是横向加速度均值aui和adi.与均值相比,横向加速度峰值导致的瞬时横向力同样会造成驾乘人员不适,因此同时给出了各驾驶人横向加速度峰值的柱状散点图,和对各圈峰值求均值后的apa升序折线,如图 10(b)、(d)、(f)和(h).apa为各驾驶人横向加速度峰值的算术平均值(即峰值平均):

式中:api为某驾驶人第i次行驶的横向加速度峰值.
图10中标注了基于横向加速度的舒适性阈值[16-17]:即 2.85 m/s2≤a< 4.05 m/s2,不舒适但可以忍受;4.05 m/s2≤a,无法忍受.图 10中还标注了根据《公路工程技术标准(JTG B01-2014)》[18]中推荐的横向加速度值(假定车辆以设计速度行驶,见图中标注的“a设计值”).图中,“上行”、“下行”分别指上行匝道、下行匝道.
图10(a)和(b)分别是YZB螺旋匝道的a均值和峰值柱状散点图,其中峰值点的分布更集中,表明峰值横向加速度对驾驶行为的控制作用更强.在图10(a)中,上行匝道aua折线在总体上高于下行匝道ada,这是由于上行匝道是位于内幅,半径值低于位于外幅的下行匝道.就均值而言,有个别数据点超过不舒适阈值;相比之下,超过不舒适阈值的峰值ap数据点显著增多;但尚未有数据点超过不可忍受阈值.此外,绝大部分a均值和a峰值数据点都是高于设计值(设计速度20 km/h对应的a值为1.7 m/s2),其原因为螺旋匝道实际行驶速度明显高于设计速度.

图 10 横向加速度统计特征Fig.10 Statistic characteristics of lateral acceleration
图10(c)和(d)是WJSB桥头立交螺旋匝道的结果显示,该螺旋匝道为双幅分向行驶,下行匝道位于内幅,上行匝道位于外幅,因此在幅值上不管是均值还是峰值,均是下行匝道高于上行匝道.由于半径值接近,WJSB螺旋匝道行驶舒适性水平与YZB类似.图 9(e)和(f)是 RQB 的数据处理结果,内幅匝道(下行)半径50 m,外幅匝道(上行)半径60 m.横向加速度二次均值和峰值平均apa折线都是下行匝道略高于上行匝道,即内幅匝道的舒适性低于外幅匝道.同时,下行螺旋匝道有若干个峰值数据点超过了不可忍受阈值.
JKRB的数据处理结果如图 10(g)和(h),该桥为单幅路面、双向混行,路幅宽度约为7 m,上行车道位于曲线内侧.仅上行匝道有少数峰值点超出不舒适阈值,横向舒适性较好.该螺旋桥较低的横向加速度幅值与双向行驶有关,由于存在对向车辆的碰撞风险,驾驶员在此路况往往选择比较低的行驶速度,因此与前述3处试验对象相比,有较多的a均值数据点位于a设计值之下.因此,对于同一处地点而言,匝道半径值越小,汽车行驶时的横向加速度值越大.
对a均值数据点进行降序处理,得到累积频率曲线,进一步处理得到最大值、均值和特征分位值;用同样的方法提取出a峰值数据点的最大值、均值和特征百分位值,如表2.对落在不同舒适度区间的数据点进行统计,得到每一区间的数据点比例,如表3.表2和表3可以为螺旋匝道半径和超高率设计提供直接的控制依据.
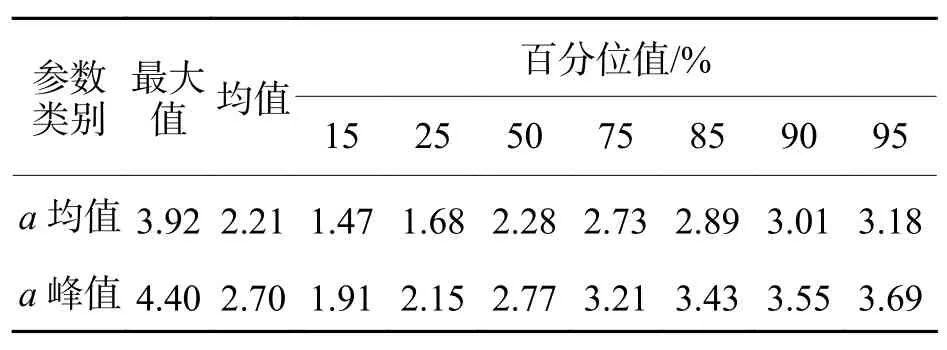
表 2 螺旋匝道横向加速度统计值以及特征分位值Tab.2 Statistics and characteristic percentiles of lateral acceleration on helical ramps m/s2

表 3 位于不同舒适度区间的a数据点比例Tab.3 Data ratio of lateral acceleration in different comfortable range %
4 横向加速度与匝道几何要素
现有研究表明,汽车在山区公路上行驶时的车身横向加速度与弯道半径负相关[18-19],即在小半径弯道上会出现更大的横向加速度观测值.图11是使用统计学软件SPSS得到的螺旋匝道横向加速度稳定均值点(au和ad)的箱线图.从图11中能观察到,a均值与匝道半径之间并未呈现负相关关系,就上坡向匝道的au数据而言,其最大值和中位值反而是随匝道半径一起增加.对于分向行驶的3处试验对象,WJSB、YZB和RQB,a均值在总体上高于混合双向行驶的JKRB,这是由于分向行驶条件下汽车行驶速度更高.其中融侨大道螺旋桥的横向加速度最大,认为匝道结构形式导致的行驶空间差异所致,WJKB和YZB螺旋匝道是采用单墩大悬挑横梁结构,内外幅匝道分设于主墩两侧,主墩对行驶空间形成压迫并对视距产生影响;RQB是门型墩多跨连续梁方案,内幅和外幅匝道之间护栏高度约70 cm,视野和视距良好,汽车行驶速度相对较快,进而产生相对较大的横向加速度幅值.
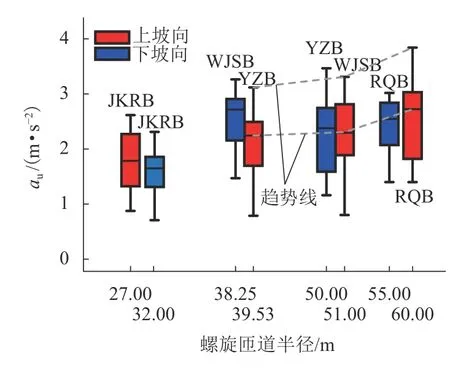
图 11 螺旋匝道横向加速度-半径箱形图Fig.11 Relationship between lateral acceleration versus curve radius on helical ramps
图12是横向加速度随路面超高率(横坡)变化的箱线图,对于分向行驶的3处匝道,超高率依次递增2%时,横向加速度中位值的变化幅度非常小.双向混行的JKRB,由于行驶速度较低,即时超高率为0%(未设超高),其横向加速度仍然最低.

图 12 螺旋匝道横向加速度-超高率箱形图Fig.12 Relationship between lateral acceleration versus super-elevation rates on helical ramps
5 车道使用行为特性
车道使用习惯是驾驶行为和驾驶风格的一个重要表现形式,明确车道使用特征能为匝道横断面和下部结构设计提供基础数据.在4座螺旋匝道中,YZB是双幅分向行驶,每幅单车道,JKRB是单幅双车道、双向混合行驶,在这两处地点驾驶员只能行驶在本车道.WJSB和RQB是双幅分向行驶,每幅双车道,本节主要分析这两处的车道使用特性.把实测轨迹线导入到谷歌地球软件,结合前置行车记录仪录制的视频图像,可准确判别车辆的车道占用情况以及驾驶员的换道行为,结果如表4、5所示.表中,“内侧”和“外侧”表示驾驶人使用的车道;表中的数字是使用内(外)侧车道的行驶次数;表中数字为非整数时,是指某一次行驶时,车辆在中途由外侧进行了车道切换.
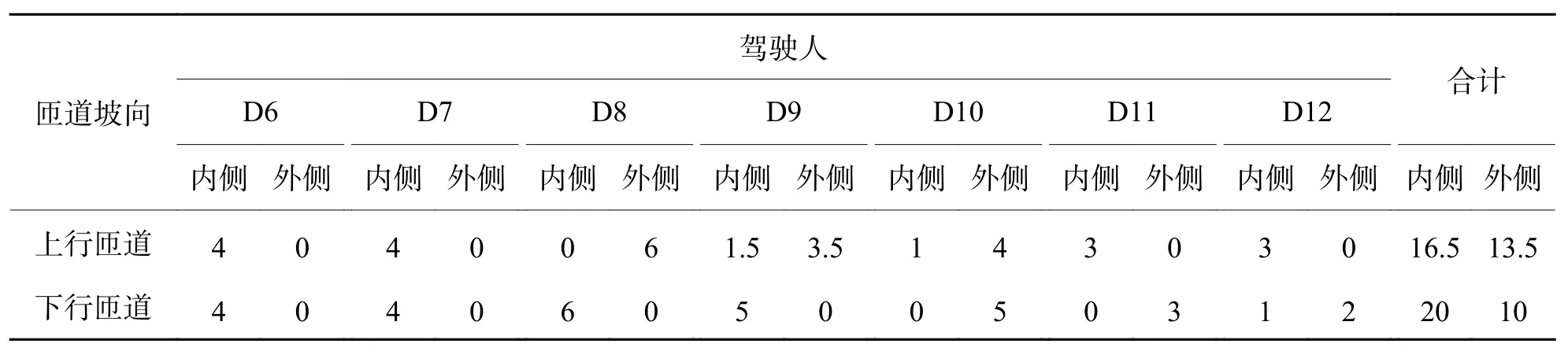
表 4 WJSB螺旋匝道车道使用情况统计Tab.4 Lane occupation on Second Fuling Wujiang River Bridge 次
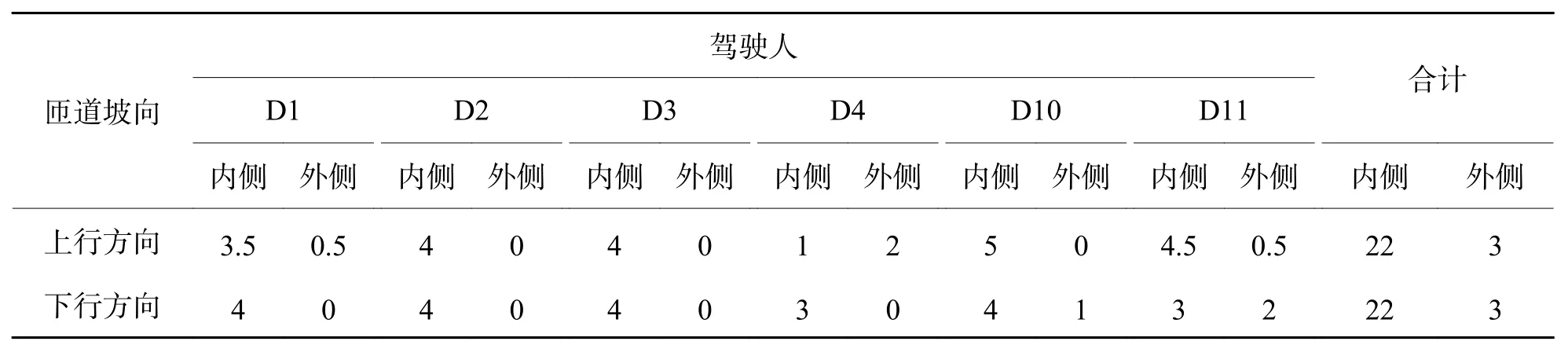
表 5 RQB桥车道使用情况统计Tab.5 Lane occupation on Rongqiao Helical Bridge 次
如表4所示,大部分被试的车道使用习惯是稳定的,表现为上行(或下行)时,第一次是选择内侧车道,那么后续次数的行驶也是选择内侧车道,同样,选择外侧车道的驾驶人也是如此.按坡向统计,上行匝道内侧车道使用占比55%,外侧车道使用占比45%;下行匝道内侧车道使用占比67%,外侧车道使用占比33%,即驾驶人更偏向于选择内侧车道.
如表5所示,上行和下行都是以内侧车道行驶为主,使用外侧车道的比例仅为12%.在使用内侧车道时,中途驾驶人可能会遇到前方慢性车辆会暂借外侧车道来超车,但超车之后仍会回归到内侧车道,即使用内侧车道的主观意愿非常明确.使用内侧车道时,由于轨迹半径减小,行驶距离相比于外侧车道缩短,因此可以节省匝道通行时间;外侧车道行驶时,行驶距离虽有所延长,但由于轨迹半径增加,横向受力会降低(舒适性提高).因此可以认为大部分驾驶人对行驶时间非常敏感,仅少部分才是更在意行驶舒适性.
图 13(a)是 WJSB 螺旋匝道平面图,图 13(b)是驾驶人使用内侧车道时的车辆轨迹线.平曲线C1和螺旋线组成了一个S型弯道,观测到几乎所有驾驶人在弯道C1上都展现了切弯行为.由于驾驶习惯和车辆惯性两方面因素,对C1切弯后车辆会驶向螺旋匝道入口内侧,然后继续保持内侧车道行驶.图13(c)是驾驶人使用外侧车道时的车辆轨迹形态,对C1切弯之后车辆驶向螺旋匝道入口内侧,但由于汽车速度较快以及驾驶习惯的因素,随即又驶向曲线外侧,并一直保持外侧车道行驶.基于此,该桥上行螺旋匝道的车道使用还与螺旋匝道入口前后的轨迹形态密切相关.
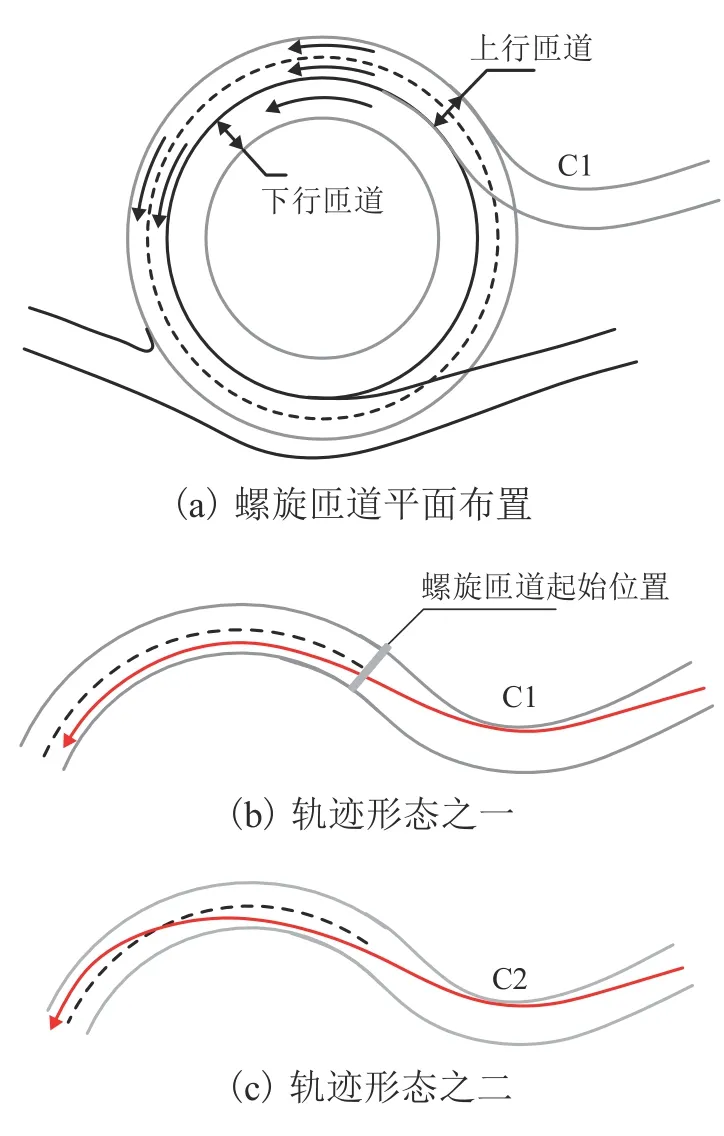
图 13 WJSB上行匝道入口汽车行驶轨迹类型.Fig.13 Vehicle tracks on entrance of upward ramps of Second Fuling Wujiang River Bridge
6 结 论
(1)横向加速度在螺旋匝道范围内主要有3种变化模式:基本维持恒定、持续性降低或升高、腰鼓型,但不管哪一种趋势,在局部位置都有明显的震荡.对于同一座立交,上行匝道和下行匝道的横向加速度变化模式并不一致.
(2)行驶过程中的慢行车辆阻滞、超车、紧急避让等行为会显著降低横向加速度的幅值,甚至使其方向发生改变.
(3)不管是上行方向还是下行方向,内幅匝道(曲线半径更小)的横向加速度幅值高于外幅匝道,即外幅匝道的横向舒适性更优.同时,有少部分测试结果超过了不舒适阈值.
(4)螺旋匝道的横向加速度实测值远高于规范的推荐值,因此需要重新审视规范中相关驾驶行为假定的合理性,并进行相应的修正,以更符合实际道路的真实驾驶行为和车辆运行特点.
(5)横断面形式、匝道半径、行驶空间等因素对横向加速度幅值有显著影响:在行驶空间相近时,匝道半径增加会导致横向加速度幅值的下降;双向混行的单幅螺旋匝道,驾驶人会选择较低的行驶速度,因此横向加速度幅值较低.
(6)对于同向双车道的螺旋匝道,不管是上行还是下行,均是使用内侧车道占主要比例.
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
振动与冲击(2022年10期)2022-05-30
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
中国交通信息化(2020年4期)2021-01-14
机械制造与自动化(2020年3期)2020-07-16
液压与气动(2020年4期)2020-04-10
中国交通信息化(2019年2期)2019-03-25
中国交通信息化(2018年11期)2018-03-01